星球表面着陆巡视一体化探测机器人研究进展
2021-03-28路达刘金国高海波
路达,刘金国,高海波
1. 中国科学院 沈阳自动化研究所 机器人学国家重点实验室,沈阳 110016 2. 中国科学院 机器人与智能制造创新研究院,沈阳 110169 3. 哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150080
自苏联于1957年发射了第1颗人造卫星(Sputnik-1) 以来,世界各航天大国开展了大量的星球探测任务并取得了丰硕的成果。探测范围从近地轨道逐渐拓展到深空领域。星球探测的方式主要有飞掠、绕飞、撞击、软着陆及移动探测等。其中,软着陆及移动探测相比其他探测方式,可对星球进行长时间直接和精确的探测。然而受着陆器的着陆条件和探测机器人移动能力限制,人类成功完成的几次星球表面着陆探测均局限于相对平坦的区域,缺少对崎岖地形的探测,而岩石区、环形山以及撞击坑等作为其主要地形组成部分,这些区域的探测对于研究地质变化、行星起源与演化和深层次样品采集等方面具有重要的意义。
随着航天技术的不断发展,采用自身具有减振功能的移动机器人,能够有效减小发射质量和包络空间,大幅降低成本,不受大部分着陆区域地形地貌的限制,单次任务可携带多个移动机器人,在星球表面不同区域进行高空投放,开展分布式探测。
本文重点回顾和分析了传统着陆巡视系统软着陆和移动探测任务的特点及存在的缺陷,分析了各种具备着陆巡视一体化能力的探测移动机器人类型及其特点,并对各自领域的研究进展进行了总结概述,对着陆巡视一体化机器人未来的发展方向进行了展望,以期为我国未来在深空探测领域后续任务中开展着陆巡视一体化探测机器人技术研究和应用提供有益参考。
1 传统着陆巡视系统及存在的主要问题
传统星球探测着陆巡视系统,一般通过探测器与减速设备和缓冲减振装置等组合的方式开展,主要面向月球和火星探测 (见表1)。截至目前,共有7辆月球车成功进行了月面巡视探测,其中4辆是无人月球车,包括苏联的月球车1号和月球车2号以及中国的两辆玉兔号月球车;3辆有人驾驶的月球车为美国阿波罗15号、16号和17号任务中搭载的 LRV (The Lunar Roving Vehicle) 载人月球车。
美国是目前世界上唯一实现火星表面巡视探测的国家,其火星探测任务经历了3个阶段:(火星探路者计划 (Mars Pathfinder,MPF),火星探测漫游车计划 (Mars Exploration Rover,MER),火星科学实验室计划 (Mars Science Laboratory,MSL)),共有4辆火星车参与。以火星探路者计划任务为例,探测器首先通过火星大气层减速;在距离火星表面约10 km高度处,系带式降落伞展开;下降到300 m高度处,缓冲气囊充气;在距离火星表面约50 m高度处,反推力火箭启动;安全着陆后,缓冲气囊被放气,索杰纳 (Sojourner) 火星车从着陆器上驶离。该任务中的着陆器为锥形四面体结构,本身不具备缓冲减振功能。

表1 传统星球探测着陆巡视系统Table 1 Traditional planetary exploration and landing patrol systems
在嫦娥四号探测器首次实现月球背面软着陆的过程中,利用激光导航避障敏感器等设备实现高精度实时导航和避障,使得着陆器能够自主选择在相对平坦的区域稳定着陆[1-2]。然而作为传统着陆巡视系统,用于着陆和缓冲减振的相关装置占据了大部分的资源能源、安装空间和发射质量,存在任务成本高、系统复杂和容错性差等诸多难题,其中任何一个环节出现故障都可能导致整个探测任务的失败,并且着陆后姿态不可调整,着陆地形及探测范围受限。
2 着陆巡视一体化机器人分类及研究现状
着陆巡视一体化机器人是一种集着陆缓冲和移动行走功能于一身的探测机器人,着陆时依靠自身缓冲机构吸收冲击能量使结构不发生损坏,通过调整自身机构改变位置姿态进而开展移动探测,能够适应星球表面复杂地形条件。与传统着陆巡视系统相比,着陆巡视一体化机器人有效降低了系统的复杂程度,大幅提高了星球表面移动作业的灵活性和探测范围。按缓冲减振形式和移动方式的不同,着陆巡视一体化机器人可分为腿式、球形、跳跃式和张拉整体式等主要类型。
2.1 腿式着陆巡视一体化机器人
在以往完成的星球表面软着陆任务中,采用的着陆器大多为多腿固定式,其着陆稳定性高、姿态控制相对成熟,但仅能开展原位探测及采样等任务,作业空间仅限于几米长的机械臂所及之处,探测范围非常局限。针对现有多腿固定式着陆器的局限,为拓展其作业范围,在传统腿式着陆器的基础上增加运动机构,着陆后通过自身机构调整,具备移动能力。
美国国家航空航天局 (National Aeronautics and Space Administration,NASA) 的 Mankins[3]提出的月面可移动模块化六足式概念机器人 Habitat,其单足为双杆并联机构,上部安装有六面体可增压舱,各模块之间的压力接口连接起来可以组成模块化月球基地 (见图1)[3]。

图1 Habitat 移动月球基地概念图[3]Fig.1 Concept map of mobile moon base of Habitat[3]
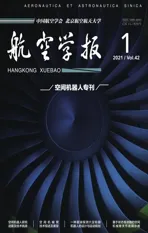
在美国重返月球计划 (星座计划) 项目资助下,NASA 约翰逊航天中心 (Johnson Space Center,JSC) 开展了新型月球着陆器研究,提出了多种概念构型[4],各有侧重点,如实现有效载荷的装卸、作为月球基地供宇航员驻留等,其中部分概念着陆器具有移动功能,可实现人员和货物的转移并能开展巡视探测 (见图2)。
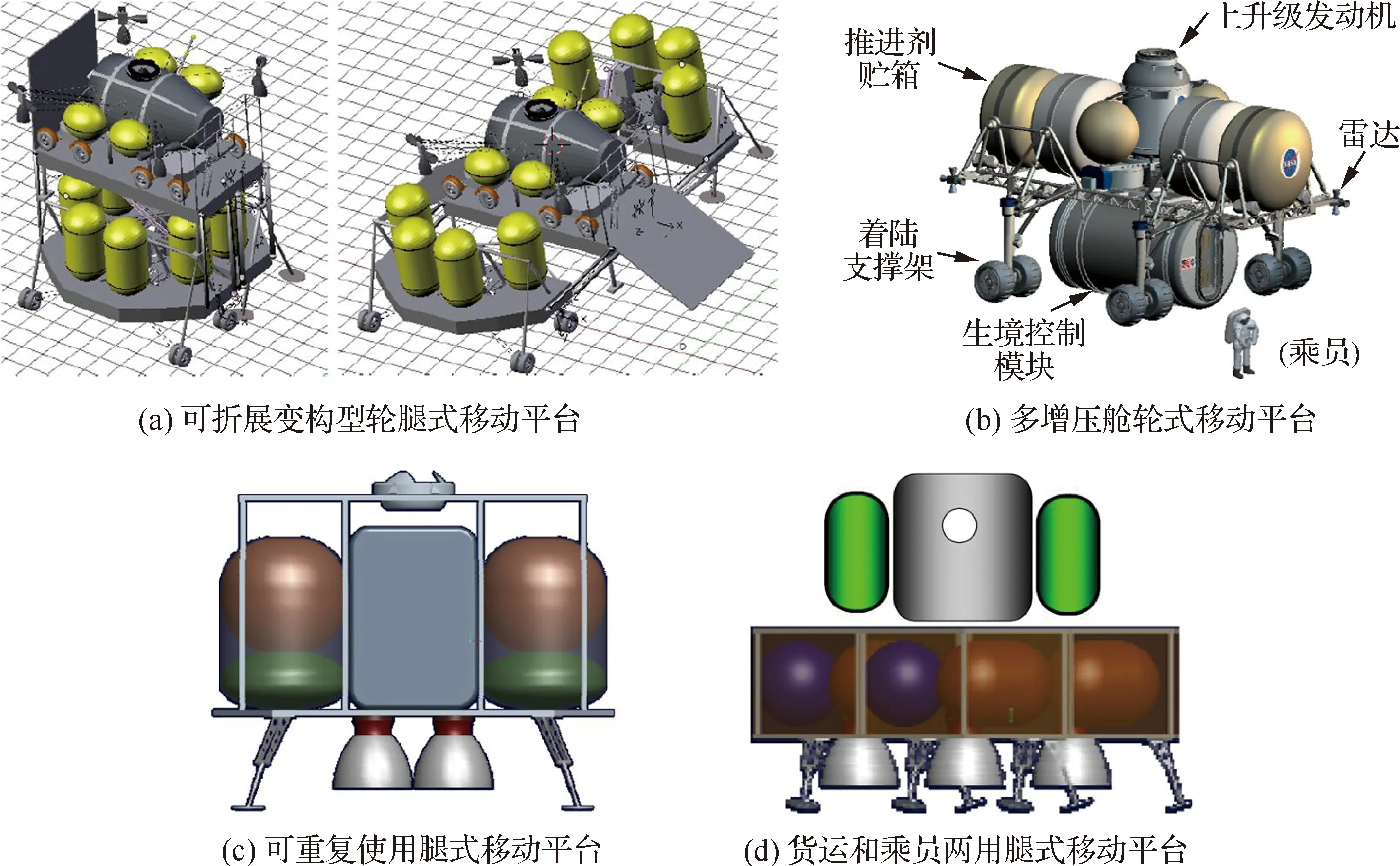
图2 “星座计划”中开发的移动式着陆器概念方案[4]Fig.2 Concept schemes of mobile lander in “Constellation Program”[4]
NASA研制的六轮腿复合式机器人 ATHLETE (见图3(a)),计划用于月球探测[5]。该机器人兼具轮式移动系统高速高效的移动性能和腿式移动系统突出的越障能力,其车轮采用法国米其林公司 (Michelin) 和美国克莱姆森大学 (Clemson University) 联合研发的碳纤维复合材料 (见图3 (b)),质量轻、强度高,在受到着陆冲击时利用变形缓和冲击,变形后可快速恢复;并且腿机构上的缓冲装置也能够起到缓冲减振功能。

图3 ATHLETE 六轮腿复合式机器人及其弹性车轮[5]Fig.3 Six wheel leg hybrid robot and its elastic wheels of ATHLETE[5]
香港大学的 Hung 和 Howe[6]提出了月面移动机器人概念 Mobitat。该机器人采用八轮摇臂转向架式移动系统,具有折展功能,在发射和下降期间收拢以减小包络体积,通过下部的两个反推力发动机实现有源下降 (见图4 (a))。着陆后,反推力发动机收拢,移动系统展开,进行巡视探测 (见图4 (b))。但该方案由于着陆后反推力装置和有源设备没有被卸载,在移动过程中,该部分占用了较多的体积和质量,使得整个系统过于笨重,影响移动性能。

图4 Mobitat 减速下降和着陆巡视状态[6]Fig.4 Deceleration descent and landing inspection status of Mobiltat[6]
此外,采用腿式着陆巡视一体化机器人的概念方案还包括:波音公司 (Boeing) 设计的火星卫星着陆器[7],分为 MCL (货运) 和 MPL (载人) 两种构型方案;NASA 设计的 Lockheed Martin[8]月球着陆器; Howe[9]提出的模块化可增压移动式着陆器等。
上海交通大学的林荣富等[10-11]综合考虑承载能力、发射空间和能耗等因素,提出了着陆与行走功能分离的四腿式移动机器人 (见图5)。该机器人在机械腿上设有着陆缓冲机构,具有多向缓冲减振能力;机械腿本身为多连杆并联机构,具有折展功能;在着陆器平台与机械腿之间增加运动关节,着陆后姿态可调整,承载能力高,具备多种复杂地形下的移动能力。

图5 着陆与行走功能分离的四腿式巡视机器人[10]Fig.5 Four legged inspection robot with separate functions of landing and walking [10]
中国空间技术研究院的张志贤等[12]提出了六轮腿式可移动载人月面着陆器 (见图6),并对其进行了全任务过程分级设计,在发射期间轮腿收拢以减小包络体积;当接近着陆时,轮腿展开;着陆后,机器人可根据月面地形选择轮式或腿式移动方式,其越障高度可达4 m。

图6 轮腿式可移动载人月面着陆器概念着陆状态[12]Fig.6 Concept landing status of wheeled leg mobile manned lunar surface lander[12]
此外,南京航空航天大学的陈金宝、上海宇航系统工程研究所的刘志、北京空间技术研制试验中心的李志杰等学者均进行了腿式着陆巡视一体化机器人的相关概念研究。
腿式着陆巡视一体化机器人集着陆、人员和货物运输及移动探测等多种功能于一身,采用模块化的设计理念,可相互组合,还能够为星球基地的初期建设提供支持,提高了星球表面作业的可拓展性。但由于其结构体积和重量较大,需要大推力的火箭运载或者采用多次发射并在星体表面完成组装,着陆地点要求相对平坦并且需保证着陆姿态的稳定性,在探测区域多样性、任务灵活性等方面存在诸多不足。
2.2 仿风滚草球形机器人
风滚草是一种在戈壁、沙漠等干旱地区中常见的植物,其近基部节上有很多弧形分枝,到了深秋季节,枯枝蜷缩成球状,质量轻且干枯的茎部很容易折断,受到风吹动后,飞在空中或在地面滚动,能移动很长距离。风滚草为近似球形,枝条具有一定弹性,能够承受高空着陆的冲击。
20世纪70年代,根据风滚草植物结构及其运动的特点,法国巴黎大学 (Paris University) 的 Blamont 最早提出利用风力驱动充气式球形机器人进行移动探测的构想[13]。此后,美国亚利桑那大学 (University of Arizona) 研制了大型圆柱状机器人原理样机 Mars Ball[13],通过外部8个充气装置交替充气和放气使重心位置发生变化,产生滚动,而柔性的充气装置本身具有缓冲减振作用。NASA 研制了电机驱动充气式球形机器人 Wind-blown Ball[14],通过操纵机构转向,但在随后的测试中,该机器人出现充气球脱落的故障。可以看到,在早期的探索阶段,研究者们仅借鉴了 Blamont 提出的设计理念,并未采用风力驱动。
火星表面大气稀薄且干燥,大气环流复杂多变且随季节变化很大,最高风速可达100 m/s,是一种无限的能量来源。索杰纳火星车曾使用的安全气囊系统在火星表面滚动了很长一段距离后才停下来,比索杰纳轮式火星车最终独自完成的移动距离 (共行驶了约90 m) 远得多[15](见图7)。受此启发,NASA 的工程师们提出了利用风力驱动仿风滚草探测器开展火星表面着陆巡视一体化探测任务的设想 (见图8),将着陆缓冲减振和移动功能统一,不受着陆区域地形的限制,极大地拓展了探测范围[16]。

图7 火星探路者着陆艺术想象图[15]Fig.7 Artistic imagination of the Mars Pathfinder landing[15]
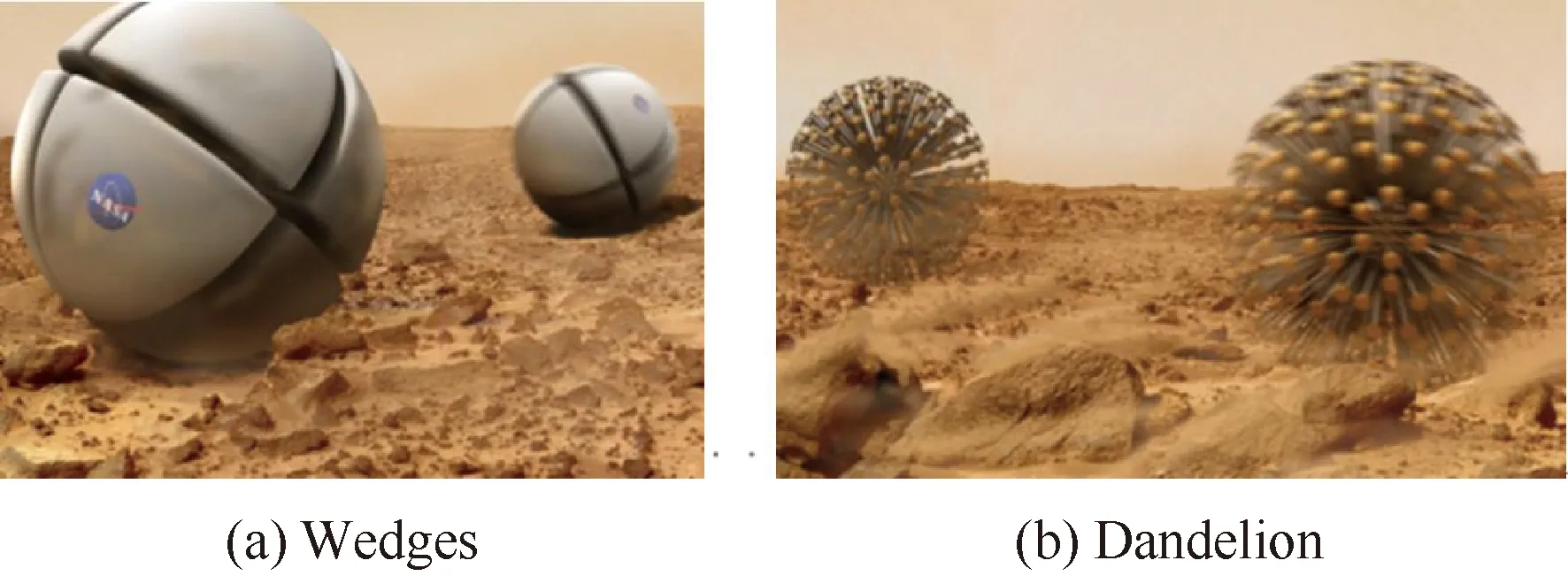
图8 仿风滚草探测器在火星表面移动探测想象图[16]Fig.8 Imagination of the moving detection of prototypes of bionic tumbleweed detector on the surface of the Mars[16]
为了更有效地利用风能并降低驱动系统的复杂度,研究者们改进了移动机器人的结构及驱动方式,针对风滚草植物的多分枝疏松结构进行仿生设计,开发了许多概念模型,包括 NASA 兰利研究中心 (Langley Research Center,LaRC) 设计的 Wedges[15](见图9 (a))、Box Kite[15](见图9 (b))、Dandelion[17](见图9 (c))、Eggbeater Dandelion[18](见图9 (d))、Tumble-cup (见图9 (e))、Hamster Ball (见图9 (f)),德州理工大学 (Texas Tech University) 设计的 Tumbleweed concepts[19](见图9 (g)),北卡罗来纳州立大学 (North Carolina State University) 提出的笼形探测器[20](见图9 (h)),以及瑞士洛桑联邦理工学院 (école Polytechnique Fédérale de Lausanne, EPFL) 开发的一种形状记忆合金 (SMA) 驱动仿滚草概念模型 Hardball 和 Softball[21]等。在这些概念模型中,Eggbeater Dandelion 通过32个弹性带状支撑结构形成球形包络,带状支撑结构有一定弹性,相比其他模型具有更好的缓冲减振性能。
图9 仿生风滚草探测器的概念模型Fig.9 Prototypes of bionic tumbleweed detectors
为了验证仿风滚草球形机器人的运动性能,NASA 兰利研究中心进行了动力学仿真和样机斜坡滚动等试验;与德州理工大学合作进行了模拟火星表面大气环境的风洞试验;与南加州大学 (University of Southern California)[22]及卡内基·梅隆大学 (Carnegie Mellon University)[23]合作进行了仿真分析、试验平台测试及沙漠、极地冰盖等实地测试。分析计算及测试结果表明,在火星表面的风力条件下,仿风滚草球形机器人具备在火星表面绝大多数区域开展移动探测的能力[24]。
仿风滚草风力驱动球形机器人,质量和体积较小,可搭载大型探测器至星球表面上空,从高空大量投放,能够以任意姿态在各种地形下着陆,着陆后受到外部风力驱动,可开展大范围、长距离的分布式移动探测,而不受携带能源有限等问题影响。不过,这种机器人被动地依靠风力驱动产生滚动运动,存在运动方向及轨迹不可控等问题,携带负载的能力也相对有限,需要根据特定的任务进行选择,并且要求探测的星球表面本身能够提供风能。
2.3 小型跳跃机器人
2.3.1 面向星球探测任务的小型跳跃机器人
早在20世纪50年代末,Oberth[25]便提出利用小型跳跃机构进行星球探测的构想。目前,日本在小行星表面移动探测领域处于世界领先水平。日本宇宙航空研究开发机构(Japan Aerospace Exploration Agency,JAXA) 与东京大学 (University of Tokyo) 联合研制的微小型跳跃机器人 MINERVA-I[26],为正十六角棱柱体构型,自重仅0.59 kg,外表面覆盖太阳能电池板,棱柱体两端的针刺状结构起到缓冲减振和保护支撑作用 (见图10 (a))。2005年,MINERVA-I 搭载“隼鸟”号 (Hayabusa) 探测器在距离丝川小行星 (Itokawa) 表面200 m高度处释放,计划采用无源被动的方式着陆,但最终因控制问题未能成功着陆。
2014年,日本发射了“隼鸟2”号 (Hayabusa2) 龙宫小行星 (Ryugu) 探测器,搭载了3个 自重为1.1 kg的 MINERVA-II[27](见图10 (b)) 和1个 MASCOT[27-29](见图10 (c)) 小型跳跃机器人。其中,MASCOT 由德国宇航中心 (Deutsches Zentrum für Luft-und Raumfahrt,DLR) 和法国空间研究中心 (Centre National d'Etudes Spatiales,CNES) 合作研制,采用立方体铝合金框架式结构,自重13.5 kg,由锂电池供电,设计寿命16 h,框架内部安装了偏置飞轮,通过电机驱动飞轮产生反作用力实现调姿和跳跃运动。

图10 日本研制的小行星探测小型跳跃机器人Fig.10 Small jumping robots for asteroids developed in Japan
2018年9月,两个 MINERVA-II1 机器人在距离龙宫表面 (重力加速度约为1g/66 500) 约55 m高度释放,首次实现了小行星表面安全着陆,并返回了在小行星表面拍摄的照片。2018年10月,MASCOT 在距龙宫表面约60 m高度释放,在11 min内经过多次反弹并最终成功着陆,此后完成了多次跳跃移动探测任务。2019年10月,“隼鸟2”号在距离龙宫小行星表面约1 km高度处投放了最后一个 MINERVA-II2 跳跃机器人。
由斯坦福大学 (Stanford University) 的Pavone 主导并联合 NASA 和麻省理工学院 (Massachusetts Institute of Technology) 研制的小型跳跃机器人,用于火卫一 (Phobos) 等小行星表面着陆巡视探测 (见图11(a))。该球形跳跃机器人外部布满“尖刺”,起到缓冲减振、保护支撑和制动作用,内部有3个相互正交的飞轮,单次水平跳跃距离约为10 m (火卫一表面,重力加速度约为1g/1 600),但运动精度较低,仅为10%~20%[30]。
为便于加工和运输,同时受到立方星CubeSate3[31]构型的启发,斯坦福大学研制的Hedgehog 概念机器人采用立方体8U构型,棱边通过3D打印加工,8个角处的泡沫球和“尖刺”起到保护和碰撞缓冲减振作用,通过在内部两个侧面和底面的三个飞轮的高速转动,提供跳跃的反作用力[32-33](见图11(b))。该机器人完成了多次模拟微重力环境的抛物线失重飞行试验及沙地跳跃逃脱试验,可在微重力环境 (0.002g) 中实现滚动、跳跃、旋转和急停制动等动作[34],能够应对沙地凹坑和凸起障碍物等崎岖地形。
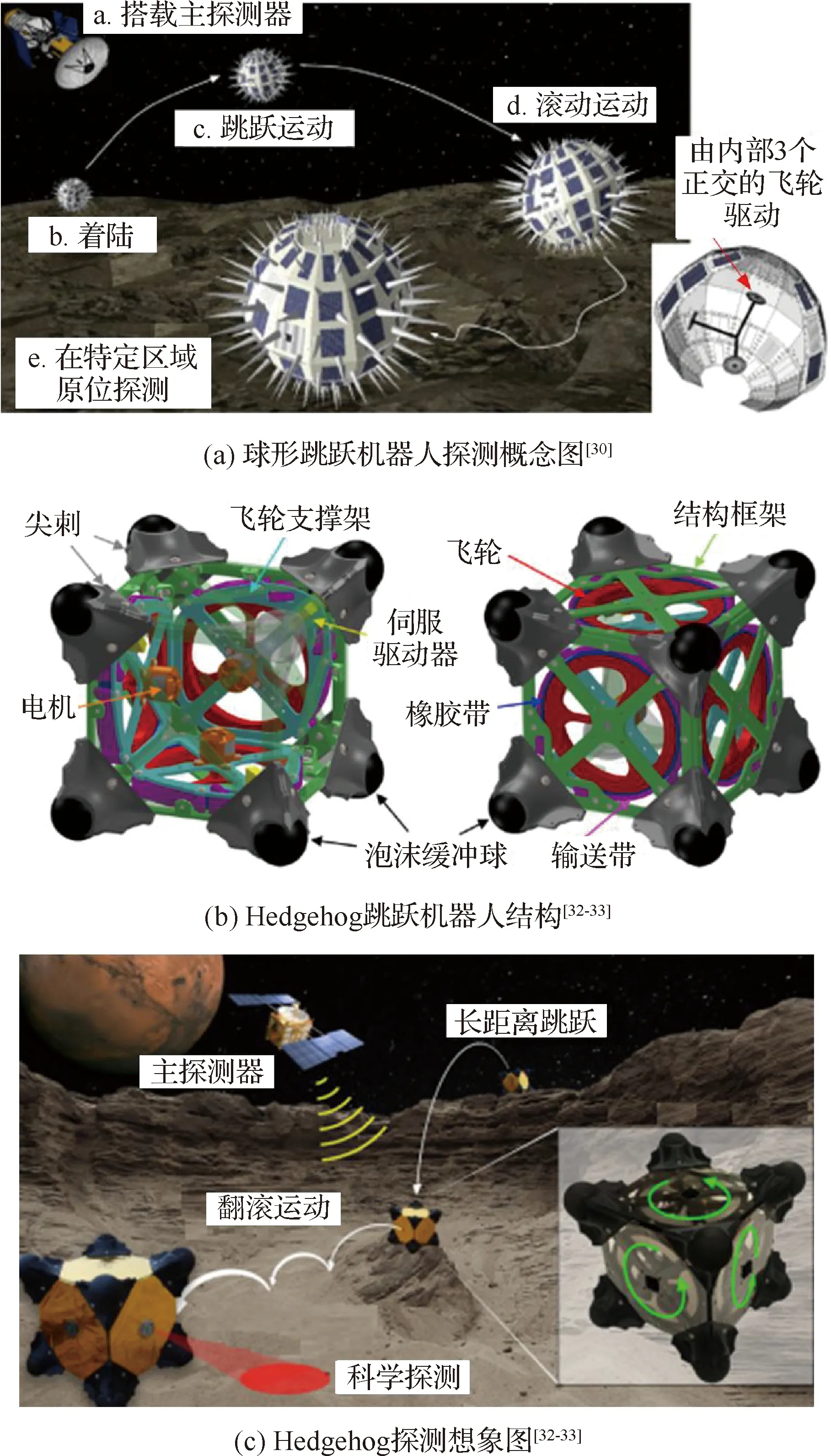
图11 Pavone等设计的小行星探测小型跳跃机器人Fig.11 Small jumping robots for asteroids developed by Pavone team
苏联的 Phobos-2 探测器携带的小型跳跃机器人 PROP-F[35],计划进行火卫一探测。该机器人采用圆柱体构型,其中一端为半球体,通过电机驱动弹簧储能装置,被压缩的储能弹簧瞬间释放后产生跳跃运动,落地后姿态可调整。但该任务最终因飞船通信故障而失败。
美国麻省理工学院设计的球形跳跃机器人 Microbots[36-37](见图12(a)),通过球体底部具有高能量密度的绝缘橡胶驱动四杆机构产生跳跃运动。仿真结果表明,该机器人在火星表面的水平和垂直跳跃距离分别可达1 m和1.5 m,最大起跳频率为60 次/h。该项目计划在火星等星球表面的洞穴、地表裂缝等大型探测器难以到达的特殊区域开展大规模着陆巡视探测 (见图12(b))。
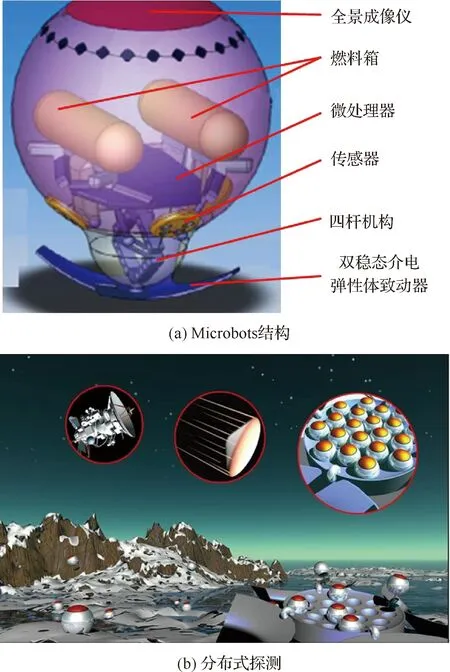
图12 Microbots 及其分布式探测概念示意图[36]Fig.12 Microbots and their schematic diagram of distributed detection concept[36]
2.3.2 地面用小型跳跃机器人
日本东京工业大学 (Tokyo Institute of Technology) 的 Tsukagoshi 等[38]研制的两轮式机器人 Leg-in-Rotor (见图13 (a)),目前已研制了三代样机。该机器人在轮轴上安装了气泵储能装置,在硬地面上能够跳过1 m高的障碍物,还具有轮式移动系统的快速移动能力,可实现全方位移动。
同样采用气泵驱动,美国波士顿动力公司 (Boston Dynamics) 研制的四轮式跳跃机器人 Sand Flea[39](图13 (b)),通过轮轴上的气泵驱动活塞产生跳跃运动,垂直起跳高度可达7.6 m。Sand Flea的车轮采用蜂窝状弹性材料,质量轻且具有着陆缓冲减振能力,在空中飞行期间利用内置陀螺仪保证姿态稳定性。

图13 地面用小型跳跃机器人Fig.13 Small jumping robots used on earth
瑞士苏黎世联邦理工学院 (Eidgenössische Technische Hochschule Zürich) 研制的跳跃机器人 Cubli[40],为立方体构型,内部利用直流无刷电机驱动3个陀螺仪内的飞轮,实现旋转、翻滚移动及制动等动作,通过飞轮高速转动过程中突然制动产生的反作用力实现跳跃,姿态调节能力强,可实现任意一角点处稳定着地[41]。
与 Cubli 的原理相似,麻省理工学院 CSAIL 实验室的 Romanishin 等[42]研制的模块化立方体跳跃机器人 M-blocks (见图13 (c)),能够翻滚、移动和跳跃。此外,M-blocks 的各模块间可自重构为多种构型,模块本身和模块组合体都具有移动能力。2019年,该实验室对初始版本的M-blocks进行了改进,通讯系统具有更高的可拓展性,模块间的自主决策和协作能力得到进一步提高[43]。
此外,其他地面用小型跳跃机器人也具有良好的跳跃灵活性与着陆姿态调整能力,如美国加州大学伯克利分校 (University of California, Berkeley) 研制的夜猴仿生腿式跳跃机器人 Salto[44],宾夕法尼亚大学 (University of Pennsylvania) 研制的轮式跳跃机器人 RHex Lite[45](翻滚后可自我调整) (见图13 (d));其中,日本千叶工业大学 (Chiba Institute of Technology) 研制的 QRoSS 跳跃机器人[46](见图13 (e)) 和瑞士洛桑联邦理工学院研制的蚱蜢仿生跳跃机器人[47](见图13 (f)),在机构外部增加柔性笼形保护罩,有效提高了着陆缓冲减振性能。
小型跳跃机器人按照驱动和运动机理的不同主要可以分为3类:通过自身弹性机构、气动驱动、飞轮反作用力等方式产生跳跃运动;与传统轮式、球形等移动机构复合并丰富了运动方式。跳跃机器人拥有离散的落地点,运动性能受地形的限制小,单次跳跃可以移动较远距离,越障及复杂地形适应能力强。此外,由于小行星的质量和体积小、引力弱且分布不规则、表面地形复杂多变,导致传统的轮式等移动系统与地面的摩擦力变得很小,牵引性能无法满足要求[48],而小型跳跃机器人却能够通过跳跃方式着陆和移动,具有独特优势。
面向星球表面着陆巡视一体化探测任务,小型跳跃机器人亟待解决的问题包括:适应高空着陆的缓冲减振机构及材料的开发;提高起跳角度、方向和距离控制的精确性,以更好适应复杂地形;连续起跳前的重心或姿态调整能力;能量的存储与释放技术,并提高能源利用效率。
2.4 张拉整体机器人
张拉整体结构是由数个彼此分离的受压构件和连续的受拉构件相互连接而成自应力平衡的稳定空间结构。1948年,Fuller等[49]首次提出“张拉整体” (Tensegrity) 一词,其后,Pugh[50]、Motro[51]、Roth[52]、Connelly[53]等学者分别从各自角度给出了定义。张拉整体结构按照节点处受压构件的数量可分为不同的类型,为简化结构和控制系统,绝大多数采用节点处为单个受压构件的 I 类张拉整体结构。
在自然界中有不少动物具有极高的身体柔韧性,如美洲豹在捕猎期间能够经受住从悬崖上跌落后着地的冲击力。而张拉整体结构同样兼具刚性结构和柔性结构的特点,既可以通过对结构施加一定的张紧力使整体结构不至垮塌,又具有良好的柔性以吸收碰撞冲击。张拉整体机器人在该结构上增加了主动的驱动力,通过自身形变改变重心位置从而实现移动,具有质量轻、可折叠等特点,可有效减小储运体积,便于在星球表面开展大规模的着陆巡视一体化探测,不受着陆地形的限制。
目前,张拉整体机器人的驱动方式主要有智能材料驱动和电机驱动两种,驱动机构分为杆驱动、索驱动和混合驱动,其中大部分采用索驱动。国外的研究机构在张拉整体机器人找形、拓扑结构分析、静/动力学和控制等理论及应用方面开展了广泛而深入的研究 (见表2)[54-72]。
3杆9索构型为最简单的张拉整体机器人,仅能实现最基本的滚动运动,运动效率低且减振性能差。然而杆和索的数量过多又会导致机器人的结构和控制过于复杂。不少学者基于6压杆构型开展了大量研究,其构型为平面对称的二十面体,是接近球体结构中最简单的形式,具有良好的缓冲减振和移动性能,主要有滚动和蠕动两种步态,在相对平坦的地形中,滚动步态移动速度快,蠕动步态则移动效率较低;但在斜坡等地形中采用蠕动步态的运动更加稳定。

表2 国外研制的张拉整体机器人Table 2 Tensegrity robots developed abroad
日本立命馆大学 (Ritsumeikan University) 的Shibata 和Hirai[54]研制的6压杆张拉整体机器人,采用24根形状记忆合金 (SMA) 线圈驱动,刚性压杆为亚克力空心管;橡皮筋作为被动拉索提供结构张紧力,能够完成基本的滚动运动。Hirai 和 Imuta[55]研制的另一款6压杆张拉整体机器人,执行机构采用24根 McKibben 气动人工肌肉。
动物的肌肉骨骼系统类似于一种张拉结构,柔性的肌肉、肌腱和筋膜相当于绳索,坚硬的骨骼类似于刚性压杆。受此启发,美国加州大学圣地亚哥分校的王志坚等[56]研制了微小型6杆24索张拉整体机器人,柔性绳索采用液晶弹性体 (Liquid Crystal Elastomer,LCE) 和碳纳米管 (Carbon Nano-metre Tube,CNT) 组成的人工肌肉复合纤维。其中,液晶弹性体是一种能够将其分子结构直接地转化为宏观形状且变形可逆的材料[57],受到红外光照射升温并产生收缩,最大收缩比可达40.5%,驱动单根绳索,即可精确控制运动。该机器人的最大载荷自重比达7.5,显著优于大多数现有的机器人,在平坦硬地面、细沙地、石子路面等多种非结构化地形均具有良好运动性能。
同样采用智能材料驱动,韩国成均馆大学(Sungkyunkwan University) 的 Chung等[58]开展了基于扭转预应变形状记忆合金 (电流驱动) 驱动的张拉整体机器人研究,研制的机器人样机能实现快速滚动和跳跃运动。
NASA 在张拉整体机器人研究领域最具代表性,主要采用电机驱动。从2011年开始,艾姆斯研究中心 (Ams Research Center) 开展了张拉整体机器人研究,计划在土卫六 (Titan) 表面 (有大气层和甲烷湖泊及沙丘等) 进行大规模高空投放,机器人由扁平折叠状态展开成球状,通过自身形变缓和着陆冲击,着陆后开展移动探测[60](见图14)。预计着陆速度为15 m/s (Titan表面),相当于从地球表面10 m高度自由跌落的着地速度。

图14 张拉整体机器人高空投放及分布式探测示意图[60]Fig.14 Schematic diagram of high altitude launching and distributed detection of tensegrity robots[60]
在 NASA 资助下,比利时根特大学 (Ghent University) 的 Caluwaerts[61]研制的ReCTeR (Reservoir Compliant Tensegrity Robot) 概念样机,外形近似于球体,可折叠成扁平状 (见图15(a)),为欠驱动系统,在6个低功率直流电机 (4.5 W) 驱动下改变线性弹簧拉索长度使机器人折叠、展开和滚动。该机器人的压杆端部安装了力敏电阻传感器,反馈与地面间的作用力;张力弹簧安装了力传感器,反馈驱动力。该机器人通过了地面1 m 高度的自由跌落着陆试验。

图15 NASA 牵头研制的张拉整体机器人Fig.15 Tensegrity robots developed by NASA
在创新先进概念计划 (NIAC) 的资助下,NASA 领导研制了面向星球探测应用的SUPERball (Spherical Underactuacted Planetary Exploration Robot) 张拉整体机器人 (见图15 (b)),由 Bruce[62](加州大学圣克鲁兹分校 (University of California, Santa Cruz)) 和 Sabelhaus[63](加州大学伯克利分校) 等负责机械和电子系统设计,Iscen[64](俄勒冈州立大学 (Oregon State University)) 和 Despraz (瑞士洛桑联邦理工学院) 等完成控制系统设计和动力学仿真。该机器人同样为欠驱动系统 (12个无刷直流电机驱动),压杆末端安装应变片式力传感器用于检测驱动绳索和被动绳索的受力。利用 NASA 开发的专用仿真软件 NTRT (NASA Tensegrity Robotic Toolkit) 完成了张拉整体机器人简化模型的仿真分析,并进行了样机10 m高度自由跌落试验,机器人着陆调整后能进行滚动运动[65]。
同样采用电机驱动,加州大学伯克利分校空间张力实验室 (Berkeley Emergent Space Tense-grities Lab) Agogino 团队的 Kim 等[66-69]设计了6压杆构型的 TT-1 (见图16 (a))、TT-2 (见图16 (b))、TT-3 (见图16 (c)) 和12压杆构型的T12-R (见图16 (d)) 等张拉整体机器人。其中,TT-1 和 TT-2 的压杆分别采用木质和玻璃纤维材料,通过24个线性驱动器 (替代绳索) 的伸缩使机器人变形移动。线性驱动器能产生较大的驱动力,但同时也使得机器人的结构刚度变大,导致缓冲减振性能降低。TT-3 增加了氮气推进器使机器人能够产生跳跃运动,压杆中间为3D打印而成的“胶囊”状中空圆柱,将电机等电子器件均安装在杆内。仿真分析结果表明,TT-3 的最大跳跃高度可达200 m。T12-R 为平面对称的菱方八面体结构,其运动轨迹为直线,相比6压杆构型的“之”字形滚动轨迹,能量利用效率更高,移动速度更快,不过结构和控制系统也更加复杂。
Agogino 团队的 Chen 等[70-71]设计的 TT-4mini张拉整体机器人,电机固定在压杆中间位置,控制器等硬件安装在结构的几何中心 (见图16 (e))。仿真结果表明,采用双线缆交替驱动时,该机器人的最大爬坡角度可达26° (SUPERball 为11.3°)。
2019年,Agogino 将张拉整体机器人应用于灾难救援。在测试中,该机器人通过无人机携带从高于180 m的高空投掷到石堆中,着陆后能够立即在周围崎岖地形环境中开展移动勘测并传回数据 (见图16 (f))。

图16 Agogino 团队研制的张拉整体机器人[66-71]Fig.16 Tensegrity robots developed by Agogino team[66-71]
国内在张拉整体机器人研究领域的起步较晚,但近年来不少研究机构在相关基础理论和样机研制与试验方面取得了积极进展[73-76]。中国科学院沈阳自动化研究所(SIA)基于6杆24索张拉整体机器人构型,先后研制了两代样机。第一代样机采用24根气动人工肌肉 (FESTO) 作为拉伸执行机构,以压缩空气为动力源,自重2.8 kg (见图17 (a))。该机器人能够在平坦硬地面实现简单的滚动和蠕动运动[77-78]。
为实现张拉整体机器人的连续运动,项目组开发了第二代电机驱动原理样机[79](见图17 (b)),自重7.7 kg,压杆采用中空的圆柱体状结构,压杆两端为方形壳体,内部集成了驱动舵机、干电池和控制系统等元件,拉索由绳索和张拉弹簧通过中间的动滑轮连接而成以增大输出力;方形壳体外端为半球状泡沫。该机器人能够产生连续的变形滚动步态,同时基于遗传算法实现了蠕动运动步态的精确控制。

图17 沈阳自动化研究所研制的张拉整体机器人[77-79]Fig.17 Tensegrity robots developed by SIA[77-79]
针对本节中分析的张拉整体机器人在着陆和滚动过程中容易造成压杆磨损或损坏等情况,可采用在压杆端部固定钢球或球状硅胶保护罩等措施,增加节点强度和摩擦系数。国内外研制的张拉整体机器人,采用电机驱动绳索产生形变运动的居多,控制方法相对成熟,但样机相对较重;而采用智能材料驱动的张拉整体机器人,可有效降低机器人本体的质量和体积。不过,形状记忆合金和人工肌肉等为强非线性系统,存在驱动响应速度低、伸缩驱动力小、难以实现精确的位置及速度控制等诸多共性难题亟待解决。此外,采用气动人工肌肉驱动的张拉整体机器人,存在驱动设备外置等缺陷,在样机变形滚动试验中不可避免地发生软管缠绕等问题并阻碍连续运动,因此,只有实现气动装置的微型化并集成内置才能有效解决这一问题。
3 结论与展望
本文对着陆巡视一体化探测机器人的研究进展进行了总结论述,面向不同星体表面的着陆巡视一体化探测,应根据探测机器人的特点和任务需求选择特定的类型 (表3)。此外,不局限于上文中总结的4类,还包括如 NASA 研制的可抛掷轮式机器人 PUFFER[80]等,面向洞穴等特殊地形的星球探测任务。它们的共同特点是都具备高空着陆缓冲减振功能和复杂地形环境适应能力,满足着陆巡视一体化任务需求。

表3 着陆巡视一体化机器人分类及性能比较Table 3 Classification and performance comparison of integrated landing and moving robots
近年来,以美国为代表的各航天强国在深空探测领域不断取得突破性进展的同时,积极拓展新型的星球表面探测方式,研制了多种具备着陆巡视一体化功能的探测机器人。中国也提出了相关技术研究的迫切需求[81]。当前,着陆巡视一体化机器人的研究尚处于起步阶段,随着人类探索宇宙的距离更加遥远,任务更加多样化,星球表面探测器将逐渐由功能单一向功能多样化的方向发展。因此,着陆巡视一体化机器人是未来深空探测领域发展的必然趋势。
未来有待于进一步深入研究的难题及可能的解决途径总结如下:
1) 着陆缓冲减振技术。探测移动机器人通过自身弹性机构缓和冲击,着陆变形调整后可直接开展巡视探测。应拓展大多传统腿式着陆器采用的多孔蜂窝、薄壁金属管等一次性缓冲器的方式,开展适应星球表面苛刻环境的抗冲击柔性机构和智能材料研究。
2) 复杂非结构化地形下的运动能力。为适应星球表面低重力、气候恶劣和地形苛刻等特殊环境,探测机器人应具有良好的越障性、运动灵活性和附着牵引性能,除大型腿式机器人外 (着陆姿态及地形要求高),其他小型探测机器人应能够以任意姿态着陆后具备自主调整和运动恢复能力,着陆地点及移动区域不受地形的限制。
3) 多机器人系统分布式协同探测。采用单一的移动机器人进行探测,作业能力有限,并且存在高风险和高不确定性等问题,一旦遭遇系统故障或者损坏,探测任务就可能提前终止。为提高探测任务的可靠性和作业范围,有必要开展多机器人系统分布式协同探测,综合利用人工智能算法等手段,解决多机器人系统任务和运动轨迹规划等问题,使得单次任务便能够实现多个探测目标。