星表移动探测机器人研究现状综述
2021-03-28张元勋黄靖韩亮亮
张元勋,黄靖,韩亮亮
1. 重庆大学 航空航天学院,重庆 400044 2. 重庆大学 教育部深空探测联合研究中心,重庆 400044 3. 上海宇航系统工程研究所,上海 201109
宇宙的形成、地球的起源、生命的进化以及外星生命等科学问题,必须通过深空探测才能获得答案。深空探测也将是21世纪人类进行空间资源开发与利用、空间科学与技术创新的重要途径。空间机器人能够在空间环境中生存并执行探索、装配、维护和服务等任务,在当前和未来的空间探测任务中发挥着重要作用。空间机器人的主要功能可分为两类:空间探测和星球表面探测。空间探测操作包括在轨装配、在轨检查、在轨维护、在轨科学实验操作等。星球表面探测操作包括表面巡视、科学规划和感知、仪器部署和采样操作等[1-4]。
自20世纪60年代以来,国外已研制了许多星表移动探测机器人。星表移动探测机器人的发展可分成以下几个特殊阶段[5]:
1) 20世纪60年代,美国与前苏联分别开发了载人与无人的月球探测器。
2) 20世纪80年代,NASA计划为完成火星取样返回任务建造大型探测器,但最终放弃了该计划。
3) 20世纪90年代,陆续实施了小型的月球探测器和火星探测器的探测任务。
中国对星表移动探测机器人的研究始于20世纪末,目前已成功实施了2次月球环绕探测和2次月球着陆、巡视探测,并于2020年底实施月球采样返回探测任务。在火星探测方面,2011年,中国自主研制了第1颗火星探测器“萤火一号”,由于其搭载的主探测器俄罗斯“土壤”号变轨失败,使得中国的第1次火星探测任务夭折。2020年7月份,中国将自主实施第2次火星探测任务“天问一号”,一步实现对火星的环绕、着陆、巡视探测任务。
本文对美国、苏联/俄罗斯、中国等国家已发射的月球及火星探测机器人进行了梳理,对各国或相关的组织机构研制的星表移动探测机器人原理样机的研究情况进行了介绍及总结,并梳理了未来星表移动探测机器人的发展趋势,以期为中国的星表移动探测机器人的发展提供参考。
1 星球探测机器人在轨试验现状
1.1 月球探测
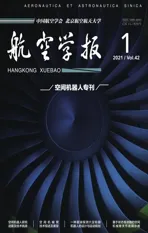
月球是地球唯一的天然卫星,是人类探索地球以外的必经之路[6]。纵观全球各国的月球探测,美国和前苏联在冷战时投入最大,取得的成果也最多。目前,只有美国成功进行了6次载人月球探测,其余各国对月球的探测均为无人探测。截至2020年2月底,全世界共实施了116次无人月球探测任务[7],实现了月球飞越、环绕、着陆、巡视和采样返回探测,如表1所示。通过分析可知,无人月球探测平均成功率为49%。
月球探测机器人是适用于在复杂非结构化月面环境中执行探测任务的机器人,它是目前人类对月球进行近距离探测最直接有效的工具[8]。在月球探测机器人领域,美国、前苏联及中国均取得了一定的研究成果,图1所示为成功在轨运行的月球探测机器人[9]。美国宇航员搭乘阿波罗载人月球车成功对月球进行了探测。前苏联的无人月球车Lunokhod1和Lunokhod2先后成功对月球进行了探测,其中,Lunokhod2月球车以39 km的总里程成为月球无人探测最远行驶距离的月球车。中国通过实施嫦娥工程对月球的探测也取得了前所未有的成功,“玉兔二号”不仅是人类首个在月球背面执行任务的月球探测机器人,而且也是人类在月面工作时间最长的月球车。截至2020年4月30日,“玉兔二号”已经在月球上度过了17个月昼(483天),累计行驶447.68 m,目前确认各设备状态良好,工作正常。
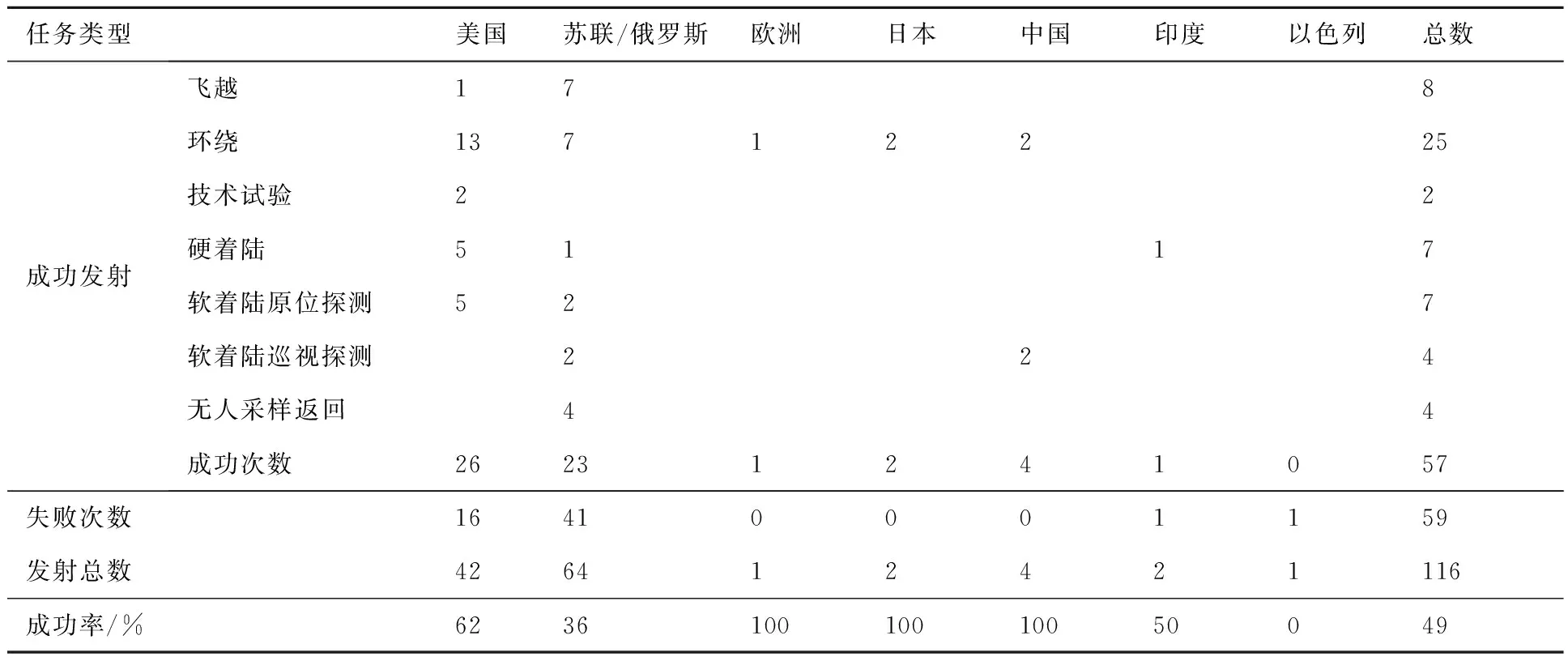
表1 全球无人月球探测任务分类统计

图1 月球探测机器人[9]Fig.1 Lunar exploration robots[9]
“玉兔号”和“玉兔二号”属于姊妹月面巡视探测机器人(统称为玉兔巡视器),鉴于“玉兔号”在其第二月昼工作时出现的问题,“玉兔二号”在综合电子和电缆部分进行了加强,并在地面开展了数千次的试验验证,使得“玉兔二号”成为目前世界上在轨工作时间最长的月球探测器。玉兔巡视器主要由综合电子分系统、移动分系统、结构与机构分系统、导航分系统等组成。图2所示为玉兔巡视器移动分系统,由车轮、行进驱动机构、转向驱动机构、差动机构和左右摇臂等组成。由承载车体的差动机构连接左右主摇臂,将巡视器本体重力载荷传递到摇臂,再通过驱动机构和车轮,将载荷传递至月面。副摇臂可绕主摇臂上的铰链转动,左右主摇臂可绕差动机构实现两侧差动,使6个车轮始终同时着地,被动适应月面复杂的地形地貌。移动分系统设计为6轮全驱动,既可以提高巡视器在松软月表的附着牵引力,又可以应对个别车轮发生故障时能够确保巡视器仍保持一定的移动能力[10]。
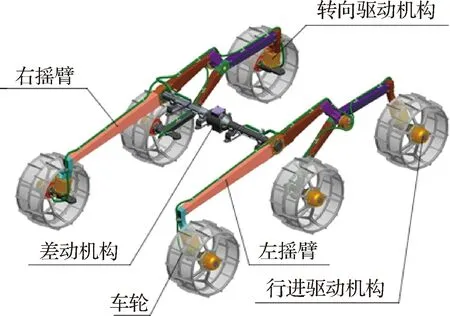
图2 玉兔巡视器移动分系统结构示意图[10]Fig.2 Schematic diagram of mobility system of Yutu[10]
1.2 火星探测
由于火星的自然条件与地球比较相似,从20世纪70年代开始,火星一直是人类深空探测的首选目标星球之一。美国和前苏联先后发射了自己的火星探测机器人,但前苏联的火星探测机器人在着陆后很快就失去了联系,只有美国发射的火星探测机器人成功着陆[11]。全世界共实施了45次火星探测任务,如表2所示,对火星的探测取得了一定的成就,包括发现了在火星上存在水的证据。通过分析可知,火星探测的平均成功率为47%,低于月球探测的平均成功率。其根本原因一方面是火星距离远,遥测遥控能力受限,导致探测器本身自主动作复杂;另外一方面是火星有稀薄的大气,对探测器的气动性能、耐热性能、敏捷性能等都提出了更高的要求。

表2 全球无人火星探测任务分类统计
美国在火星探测机器人方面处于领先地位。如图3所示,索杰纳号、勇气号和机遇号以及好奇号相继被送入火星表面,成功对火星进行了探测[12]。其中,机遇号在火星上工作了15年,行驶里程超过45.16 km,是目前人类在地球以外天体上行驶距离最远的探测机器人。

图3 火星探测机器人[12]Fig.3 Mars exploration robots[12]
好奇号作为迄今为止最庞大、最复杂、最先进、最昂贵的火星探测器,其探测结果使人类对火星的认识发生了革命性变化。好奇号为6轮布局,总质量899 kg,有效载荷总重84 kg,由移动分系统、结构与机构分系统、导航与控制分系统、综合电子分系统、电源分系统、热控分系统、测控数传分系统等组成,携带有11种有效载荷,开展火星环境、生命等方面的探测任务,其组成如图4所示[13-14]。
图4 好奇号结构组成[14]Fig.4 Structural composition[14] of Curiosity
好奇号在火星表面工作有5种模式:行进模式、勘查模式、接近模式、接触模式以及样品采集与分析模式,这些工作模式直接决定导航与控制分系统的设计目标。好奇号导航与控制分系统由视觉导航子系统、组合导航子系统与路径规划子系统组成。视觉导航子系统负责完成环境图像获取、立体匹配、三维地形重建等功能,它主要包括导航相机、避障相机及相应图像处理单元。组合导航子系统负责完成火星车的定位定向与姿态获取功能,主要包括惯性导航系统和太阳敏感器等;路径规划子系统在综合上述两个子系统信息后进行处理,完成路径规划。好奇号的工作是以自主导航与控制为主、遥操作为辅。要完成自主导航与控制工作,好奇号要求具有清晰感知所处环境、发现障碍与危险、了解自身位置与姿态、综合分析规划路径等能力,这些功能分别是通过数字高程模型图像构建与障碍物检测技术、火星表面三维场景拼接与重建技术、立体视觉匹配技术、火星车定位定姿技术、视觉里程技术、在轨自标定技术及路径规划技术来实现的[15-20]。
作为导航分系统的执行分系统,好奇号移动分系统的2个前轮和2个后轮分别带有独立的转向电机,这使其能够在原地进行360°旋转。好奇号沿用了以往索杰纳号、机遇号和勇气号火星车的摇臂-转向架式结构,在翻越多岩石的不平整表面时具有最大程度的稳定性,能够翻越约65~75 cm 高的障碍物,能越过直径约为50 cm的坑,在平整坚硬的地面上行驶的最高速度为4 cm/s,截至目前,总行驶里程约为22.1 km。
好奇号的移动系统为6轮主副摇杆系统,使火星车能够越过车轮大小的岩石或壕沟。除直线行驶外,火星车能够实现弧线转弯和原地转弯[21],见图5。另外,主副摇杆系统能够承受车体倾斜60°、吸收着陆和行走过程的冲击载荷。摇杆-转向架机构与差速器保证火星车在严重不平整路面移动时,6个车轮与地面也接触良好。这样的设计有两个优势:其一,每个车轮受力均匀,该性能对火星车在松软土壤中行走至关重要,因为压力集中会导致车轮沉陷;其二,火星车在越障时,保证总有车轮与地面接触并提供驱动力,从而增强其越障能力。
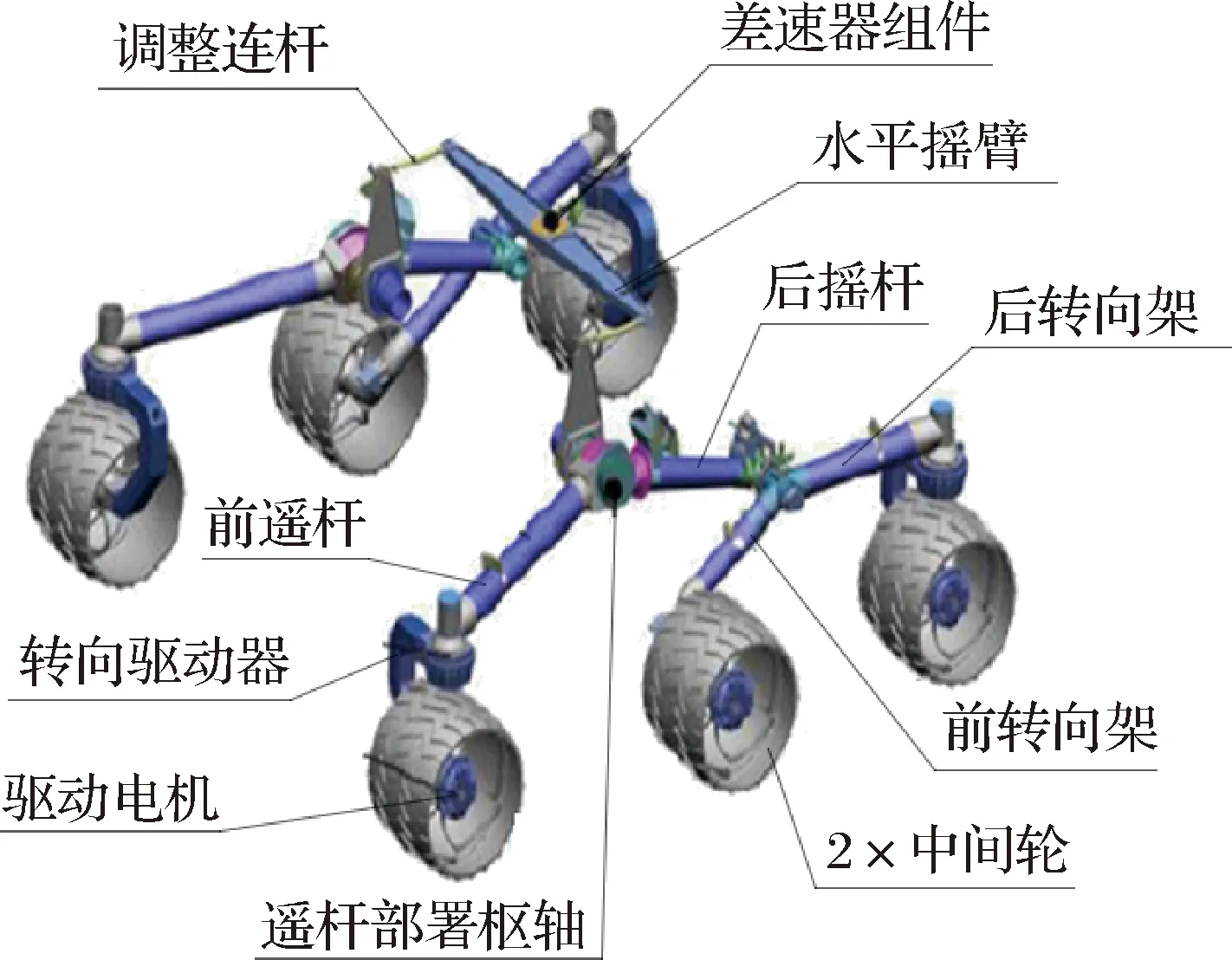
图5 好奇号摇杆转向架移动系统[21]Fig.5 Rocker-bogie mobility system of Curiosity[21]
另外,值得一提的是好奇号电源分系统[22-23],其中最富特色的部分莫过于其多功能同位素温差电源,该电源采用PuO2(Pu-238)作为燃料,能够持续稳定地为巡视器其他分系统提供电能和热能,工作寿命可达14年以上。采用“核电池”大大降低了电源系统对火星环境的依赖性,提升了巡视器在低温、尘暴等气候环境下的生存能力。
美国三代火星探测机器人的车轮参数及受力如表3所示。同时对比好奇号与火星探测漫游者(Mars Exploration Rover,MER;包含机遇号和勇气号)的移动系统,发现其移动性能非常相似;其次,好奇号的地面压力重量比、速度重量比、转矩重量比和惯性测量元件均与MER相似。不同之处是差速机构,MER用的是差速箱结构,而好奇号用的是差速杆结构。
综上所述,主副摇杆系统被广泛应用于星表移动探测机器人的设计中,主要原因是该系统的车轮与地面接触良好,底盘始终保持两根摇杆倾斜角度的平均值(相对地面),且允许星表移动探测机器人爬越车轮直径一半大小的障碍物。但这种结构的刚度和强度有限,不适宜高速(>200 mm/s)行驶,且比常规悬架复杂,需要差速器配合。
在成功实施探测任务的星表移动探测机器人中(如表4所示),通过结构形式对比分析表明:轮式结构是开展星球表面巡视探测任务的首选,其中4轮、6轮、8轮分别占比27.27%、54.55%、18.18%。绝大部分星表移动探测机器人都采用摇臂转向架式移动系统,占比54.55%;各星表移动探测机器人的爬坡能力在20°~30°之间[24]。

表4 星表移动探测机器人对比(统计时间截至2020年4月30日)Table 4 Comparison of planetary surface mobile exploration robots (Statistics up to April 30, 2020)
目前星表移动探测机器人都是以月球或火星为探测目标,其表面环境恶劣、非结构性强,对星表移动探测机器人的移动性能提出了很高的要求,因此星表移动探测机器人必须具有性能优越、自适应能力强的移动系统,这也是星球探测的核心技术之一。同时月球和火星的重力环境均低于地球,如何验证移动系统在不同于地球重力环境下的移动性能也是星表移动探测机器人研究的关键问题。
随着各国对太空资源的争夺,美国提出了重返月球计划、中国提出了火星登陆计划,欧洲航天局和印度也提出了相应的月球探测计划。新一轮的太空探测竞争必定会出现更多的星表移动探测机器人,星表移动探测机器人也必将更加智能、功能更加强大。
2 原理样机研究现状
自20世纪60年代以来,以美国、前苏联(俄罗斯)、法国、日本等发达国家为首,各国科研机构纷纷进行各种类型星表移动探测机器人的研制,相继研发了各种不同类型的原理样机[25]。20世纪末,中国在新世纪航天发展的近期目标中确定了“开展以月球探测为主的深空探测的预先研究”,以清华大学、哈尔滨工业大学、北京航空航天大学和航天科技集团第五、八研究院为主的一些高等院校和科研机构相继开展了月球探测机器人的研究工作[26-27]。迄今为止,国内外研究人员从星表移动探测机器人的越障性能、地形适应能力、能耗等需求出发,研制出了大量的原理样机。本文根据移动方式不同,将其分为轮式、腿式、履带式及其他类型4种形式。
2.1 轮式机器人
轮式机器人具有移动速度快、效率高等优点,得到了广泛研究。轮式机器人可分为单轮、两轮、三轮、四轮、五轮、六轮、八轮,其中四轮和六轮的研究最多。根据已收集到的资料,对各种轮式的机器人作了介绍和分析,本文所列举的不同轮数机器人的样例占比如图6所示。由图可知,四轮、六轮星表移动探测机器人由于具有显著的灵活性和稳定性仍是目前研究的重点。
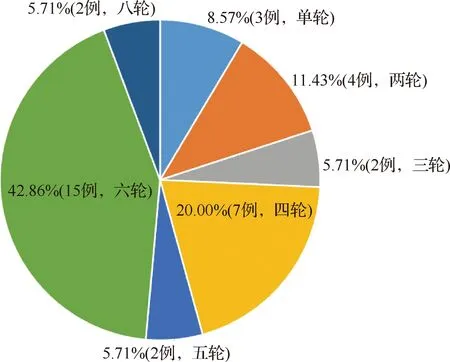
图6 不同轮式星表机器人研究分布Fig.6 Research distribution of different wheeled planetary robots
单轮机器人结构简单,近似点接触的方式使其转向更为灵活;体积小,更容易找到最佳的越障路径;同时轨迹控制也相对简单;缺点则是不稳定、易倾倒且控制较难。具有代表性的有美国卡内基梅隆大学(Carnegie Mellon University,CMU)研制的Gyrover、日本东京电子通讯大学和美国密执安州立大学各自研制的球形机器人。CMU研制的星球探测机器人Gyrover[5,28-29],用一个轮子代替整个车体,利用圆形结构的地形适应能力,并且体积大大减小,增加了其机动性和灵活性,见图7[29]。日本东京电子通讯大学研制的球形移动机器人[5,30]由球形轮和弧形体构成,运动控制机构都在球形轮内,3个驱动电机装在一个单摆上,分别控制球形轮、弧形体和弧形。美国密执安州立大学的球形机器人[31-32]内部含有4根螺杆,每根螺杆各装有质量块且能独立驱动,通过改变质量块位置来改变机器人整体质心位置,从而产生偏心力矩来实现机器人的全方位运动。
图7 单轮机器人Gyrover[29]Fig.7 Single-wheeled robot: Gyrover[29]
两轮机器人结构简单、控制可靠、避障灵活,可作为子探测机器人提高探测效率、减小探测风险。哈尔滨工业大学研制的两轮并列式月球车[33]具有体积小、不易倾覆、零半径旋转的特点。瑞士联邦工业大学研制的可进行遥控操作的两轮移动机器人Joe[34],采用陀螺仪作为传感器来获得机器人姿态信息;由于两轮平行布置,每个轮各装有一个直流电机驱动,Joe能稳定地做U型回转和零半径回转,见图8(a)。美国Southern Methodist大学研制的两轮自平衡机器人nBot[35],不仅可以进行零半径回转,还可以在运动过程中碰到障碍物后自主地选择路线绕过障碍物继续运动,实现了在室内、室外平坦路面和室外崎岖路面等环境下的运动,见图8(b)。
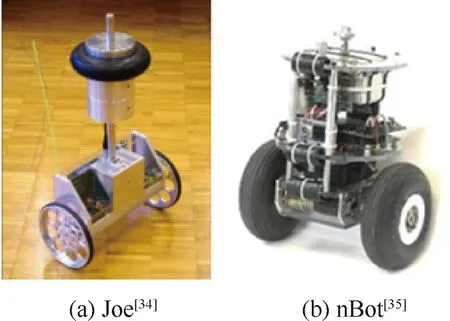
图8 两轮机器人Fig.8 Two-wheeled robots
另外,美国国家航空航天局(National Aeronautics and Space Administration,NASA)拟于2025年计划将两轮机器人Axel Rover送上月球进行洞穴探测。Axel Rover借鉴“溜溜球”的工作原理,通过不断地摇动和解开其身上的绳索,以期实现在任何地形上执行探测任务[36]。为此,NASA联合加州理工大学已研制了三代Axel Rover[37]。Axel V1被设计成一种模块化运载器,可携带有效科学载荷模块进行探测,但其越障能力不佳。图9(a)所示的Axel V2在Axel V1的基础上配备了绳索系统和大型“桨”轮,使其具有高机动性,能适应各种极端地形,但Axel V2的绳索易与车轮缠绕而出现故障。图9(b)所示的Axel V3为绳索提供了一条导向管道,以防止绳索与车轮缠绕;同时其通过差速驱动可以实现原地转弯等操作。

图9 Axel Rover[37]Fig.9 Axel Rover[37]
三轮机器人常以可展开移动系统为主,3个车轮联接于同一悬架,可以达到较大的体积折叠比,但由于其平衡性不佳,实际应用并不多。日本宇宙航空研究开发机构(Japan Aerospace Exploration Agency,JAXA)和东京工业大学联合开发了折叠式机器人Tri-star2[29,38],该机器人采用轴环和可压缩轮结构,具有较强的机动性,其体积折叠比可达到373%,见图10(a)。美国国家技术标准局研制了索缆并联机器人RoboCrane[29,39],该移动系统由3组索杆铰接在一个Stewart平台上形成,索杆可代替动力源驱动形成移动框架,通过索缆的顺序张紧与释放,改变索杆和车轮间相对位置,可最终完成折叠与展开功能,见图10(b)。
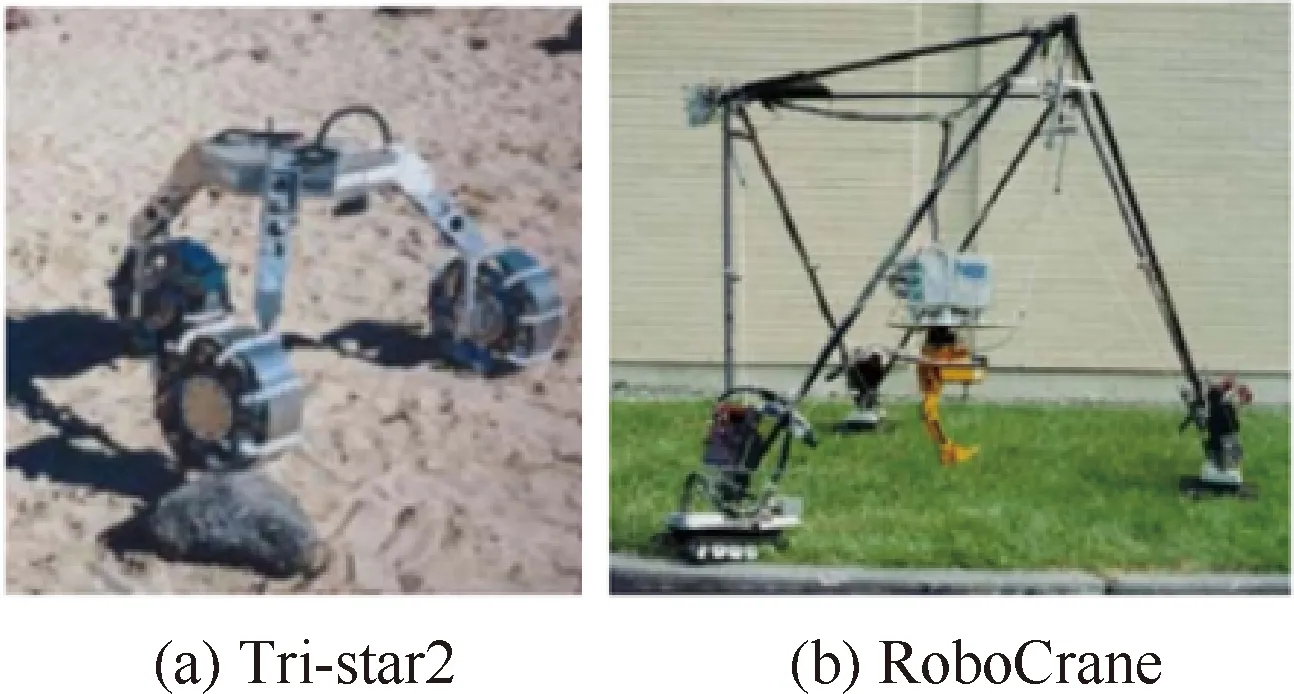
图10 三轮机器人[29]Fig.10 Three-wheeled robots[29]
四轮机器人平衡稳定性好且理论成熟,其研究应用较为常见。美国的四轮探测机器人有较多研究成果,如CMU的Nomad[40-41]、NASA的SSR(Sample Return Rover)[42],桑迪亚国家试验室的RATLER[43-44],喷气推进实验室(Jet Propulsion Laboratory,JPL)的Nanorover[45]。国内的哈尔滨工业大学研制了行星轮式月球车[46]和变质心四轮月球车[47],湖南大学研制了一种菱形四轮月球车[48-49]。美国CMU研制的一种底盘可变形的四轮行星车Nomad,其底盘主要通过两个四杆机构进行变形,底盘的四杆机构可展开成菱形或收缩成直线。当底盘完全展开时所占的包络空间比其折叠状态时增加35%,这种展开功能使底盘具备超越其装载结构20%的静稳定性,见图11(a)[41]。湖南大学基于“四轮三轴”设计思想研制了菱形四轮月球车,该车用最少轮数实现了六轮移动系统具有的三轴性能,且任意三轮都能形成稳定的三角形支撑结构;遇到障碍时,通过调整姿态,将重心置于任意3条摆臂上,实现重心上下、前后、左右的偏移,完成跨越的动作,在转向、爬坡、越障等方面性能优越,见图11(b)[48]。

图11 四轮机器人Fig.11 Four-wheeled robots
五轮机器人兼具四轮的简单轻巧和六轮的越障灵活,但五轮式不具备对称稳定性且控制较难,其研究应用较少。图12为JAXA研制的Micro5[50],该车采用五点接触悬吊式结构,其中4个角轮为驱动轮,中间轮为支撑轮,可绕横梁节点旋转,以此来调整重力在各车轮上的分配,从而提高车体的稳定性和机动性。上海交通大学研制了一款五轮铰接式月球车[51-52],其前轮和中间两轮能独立转向、独立驱动,后面的两个车轮是辅助轮;在越障过程中,仰俯电机通过驱动俯仰齿轮副使俯仰车架离开地面,从而提高越障性能。

图12 五轮机器人Micro5[50]Fig.12 Five-wheeled robot: Micro5[50]
六轮机器人具有较强的越障能力,是目前国内外构型最多、研究应用最广的类型,六轮式探测机器人的差异主要体现在悬架系统上:① 摇臂-转向架式悬架最具有代表性,通过副摇臂的转动,并借助于从动轮来调整载荷在各个轮上的分力,从而提高车体的稳定性和越障能力;美国JPL多采用此悬架系统且开发了Rock 7[53](图13(a))、FIDO(Field Integrated Design & Operations)[54]、SDM(Software Development Model)[55]等车型;② 三体柔性悬架由三节结构串联铰接组成,可以实现俯仰、扭转及摆动等运动形式,具有很强的地形适应能力及越障能力,但其所载仪器易受地形的影响;前苏联的Marsokhod[56](图13(b))和哈尔滨工业大学的六圆柱-圆锥式月球车[57]采用此悬架系统;③ 平行架-叉形架悬架具有六轮独立驱动、前后两轮独立转向的特点,叉形架可以分担平行架的负载,使中轮易于越障,具有较强的稳定性和通过性;欧空局与瑞士苏黎世联邦理工学院联合研制的CRAB、Shrimp(图13(c))及SOLERO[58]均采用此悬架系统,国内上海航天局牵头研制的MR-2[59]和北方车辆研究所的FDTM(Find and Trace the Moon)月球车[60]也采用类似悬架系统。

图13 六轮机器人[53,56,58,62-63]Fig.13 Six-wheeled robots[53,56,58,62-63]
国内外科研机构还研制了其他的六轮悬架系统。欧空局与俄罗斯RCL(Russia Science & Technology Rover Co.Ltd.)联合研制的RCL Concept-C[61]的悬架两侧通过差速机构连接,悬架各构件间的耦合关系使其具有较强的越障能力,通过复杂路面时承载平台相对平稳;其研制的RCL Concept-E[61]悬架系统由3组平行四边形机构组成,3组机构均与承载平台铰接,无差速机构,在通过不对称障碍时,承载平台易保持水平。图13(d)为吉林大学的正反四边形月球车[62],采用正反四边形悬架,该悬架每侧由六根杆件相互铰接成一套正四边形机构和反四边形机构,左右两侧悬架在水平杆处与载荷平台通过差速器实现差速,其正、反四边形机构均可提高越障能力和运动稳定性。国防科技大学的双曲柄滑块月球车[63]如图13(e)所示,其采用独特的双曲柄滑块联动悬架,该悬架由主摇臂、滑块及曲柄连杆组成,通过滑块组合在主摇臂上的滑动来改变车轮之间的相对高度以适应地形。
另外,值得一提的是重庆大学联合四川美术学院提出的可重复、可重构载人月球车概念设计方案[64]。可重复、可重构载人月球车前、后车架均与中车架铰接,使前、后车架能够相对折叠,见图14(a)和图14(b);前、后车轮的轮毂电机的轴与对应车架上的悬架相铰接,使前、后车轮能够在俯仰方向上摆动,当前、后车架相对折叠到位时,前车轮与对应侧的后车轮贴靠在一起,进而实现大的收藏比(3.73)。目前,该概念车已经完成样机研制,见图14(c)。
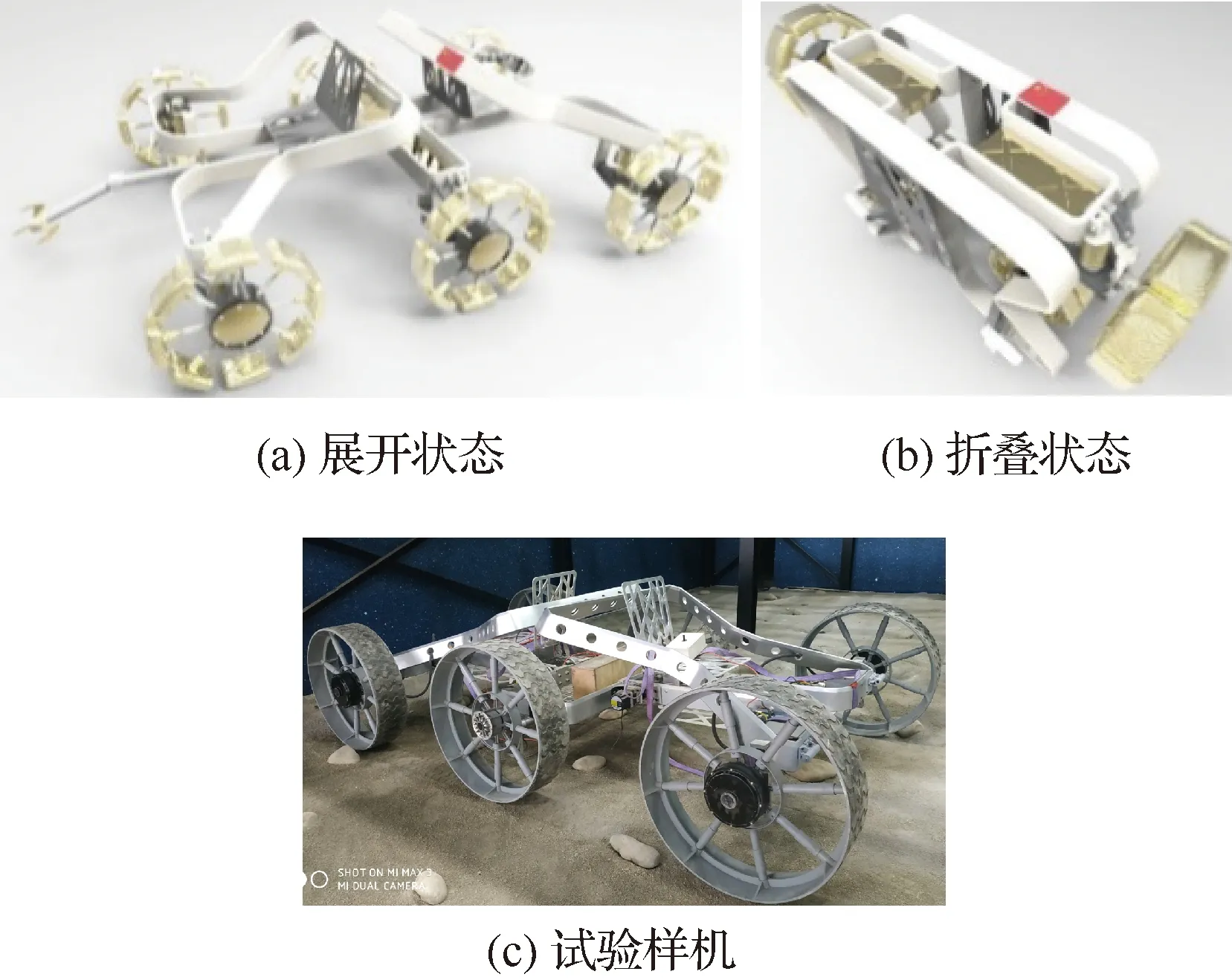
图14 可重复、可重构载人月球车[64]Fig.14 Repeatable and reconfigurable manned lunar rover[64]
八轮机器人在行驶稳定性方面具有优势,但结构和控制则较复杂,国内外对其研究并不多。国外瑞士洛桑联邦理工学院研制了Octopus探测机器人[49]。国内哈尔滨工业大学研制了一种扭杆双摇臂式月球车[47,65-67]如图15所示,采用闭链平面铰链机构,其结构左右对称,通过差速机构与承载平台连接,具有重力在各轮上均匀分配、八轮自适应地形及通过性能良好等优点,但其结构相对比较复杂。

图15 八轮扭杆双摇臂式月球车[47]Fig.15 Eight-wheeled lunar rover with torsion-bar and two rockers[47]
轮式星表移动探测机器人是目前各国研究最多的,在试验验证方面,围绕轮式星表移动探测机器人的移动可靠性和稳定性,各国都有针对性地研制了高精度的单轮测试系统和整车测试系统。
单轮测试平台用以研究车轮与星球模拟土壤之间的相互作用,为机器人更好地完成探测任务奠定基础。整车测试系统能模拟星球表面的环境条件,根据表面地形地貌、岩石类别和土壤物理机械特性等特征建立模拟试验场。在试验场内可进行轮式星表移动探测机器人的通过性试验,检验其动力性、越障、爬坡及路径规划等能力。
2.2 腿式机器人
腿式机器人一般采用仿生学原理,主要模拟哺乳动物、昆虫等生物的行动方式。腿式机器人可以很好地实现越障和避障,有的甚至可以实现原地转向,而且不会打滑。腿式机器人在地形适应能力方面优于轮式结构,可以越过更高的障碍和穿过更崎岖的地形,缺点则是行走速度低、效率低,结构和控制系统相对比较复杂,其步态规划和平衡控制也是核心难题。
美国CMU在腿式机器人方面研究较多,曾开发Dante Ⅰ、Dante Ⅱ、Ambler以及Daedalus[38,68-70]。Dante Ⅰ曾对南极埃里伯斯火山口进行了探险。Dante Ⅱ是Dante Ⅰ的改进型,如图16(a)所示。Ambler采用被动式腿结构,能独立调节,具有很强的越障能力。Daedalus在Ambler的基础上进一步优化,其越障能力进一步得到提高。德国宇航中心研制的小型六足机器人DLR-Crawler[71],其可作为子机器人置于大型探测器内,投放到相对危险的区域执行探测任务,见图16(b)。德国人工智能研究中心研发的六足蜘蛛式机器人CREX[72]如图16(c)所示,利用多足和多冗余度可以在恶劣环境中完成探测工作。波兰波兹南科技大学研制的六足机器人Messor[73]对复杂地形也具有较强的适应能力。日本千叶大学研制的六足机器人COMET-IV[74]更适应斜坡及松软地形。
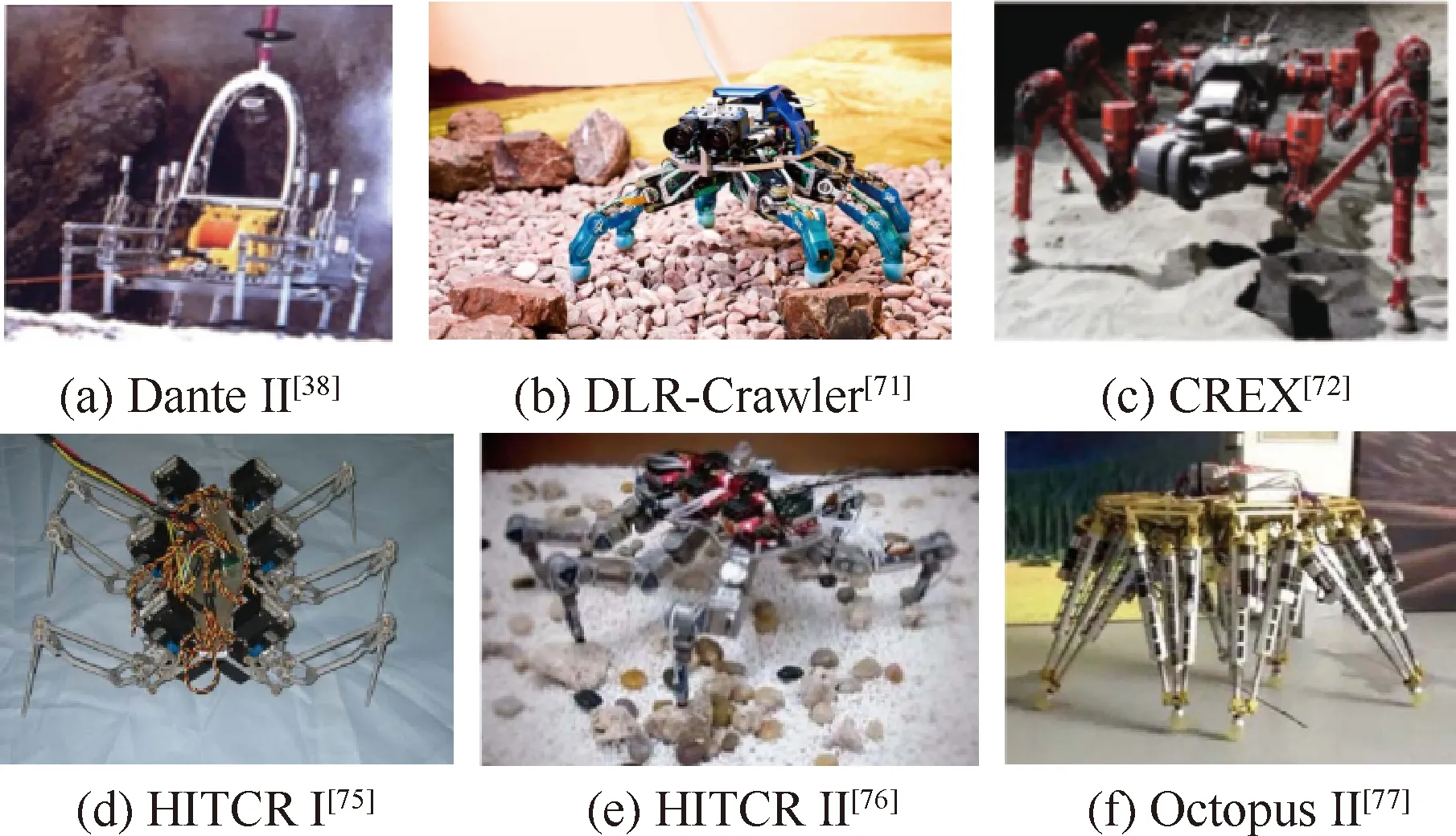
图16 腿式机器人[38,71-72,75-77]Fig.16 Legged robots[38,71-72,75-77]
鉴于六足机器人具有稳定性好、承载大及环境适应能力强等优点,国内对六足机器人也开展了多方位的研究,如哈尔滨工业大学研发的两代仿生六足机器人HITCR[75-76](图16(d)、图16(e)),上海交通大学在“国家973项目”的支持下研制了Octopus系列六足机器人[77](图16(f))以及带腰仿生六足机器人[78]。其中哈尔滨工业大学研制的HITCR I[75]如图16(d)所示,其以复合四连杆机构为腿部基本结构,并将腿部驱动系统的重量集中设计在躯干基关节上,使得机器人腿部具有较大的运动刚度和较小的转动惯量;同时其躯体外形以及各肢体基关节分布的基本构型均为椭圆形,这种设计减少了腿间运动干涉,提高了步行的稳定性,实现了在平坦地形上的自由步态行走。图16(e)的HITCR Ⅱ[76]则是为在复杂环境中行走而研制的,其腿部采用高集成模块化的结构设计,由基节、股节和胫节组成,各个关节的结构也完全相同,保证了机器人良好的互换性;同时安装了视觉和力等传感器,可通过视觉传感器来选择足部的路径和支撑点,通过腿部三自由度力传感器的柔度控制来提高机器人对崎岖地形的适应能力。另外,北京航空航天大学提出的九自由度六足全方位步行机器人[79],巧妙地利用六足结构将自由度减少为9个,并可实现全方位行走。
腿式机器人的运动是一系列离散的点与地面接触,其对地形的适应性较强,同时对所探测环境的扰动也较小,能够对地形结构复杂且具有较高科考价值的区域实施实地探测。然而,对腿式机器人高效、节能步态规划及机器人本体在强非结构地形运动的灵活性、稳定性研究仍需进一步深化。随着对动物仿生学研究的深入、控制技术和传感器技术的不断进步,以及未来对强非结构地形如月球洞穴、火星冲积地形等探测需求的提高,将共同促进腿式机器人技术的快速发展。
2.3 履带式机器人
履带式机器人具有地形适应能力强、稳定性能和越障性能良好、动载荷小、结构紧凑等优点,但其整体结构笨重、能耗大,且其履带容易被岩土磨损,导致履带式机器人在星表探测方面的研究相对较少。
俄罗斯移动车辆工程学院在履带式探测机器人方面有一定的研究,曾研制了IDD(Instrument Deployment Device)双履带式探测车和四履带火星探测车[38,80-81]。IDD双履带式探测车如图17(a)所示,该车整体结构可变形且重心低,主车体平台既可与地面平行,又可向前翻转与地面垂直。四履带火星探测车重450 kg,采用四履带移动系统,有较强的地形通过能力。欧洲航天局研制的履带式机器人Nanokhod[82]在移动时与地面有很好的摩擦因数,具有结构简单、稳定性高、越障能力强等优点,但转弯时存在摩擦损失大、机动性能差等不足,见图17(b)。日本在履带式机器人方面研究较多,如JAXA研制了一种轻型履带式机器人[83],其悬架由4个独立驱动及转向的网状履带轮组成,履带与地面接触面积大,再通过其特有的悬架系统使其具有较强的越障能力,见图17(c);千叶工业大学研制的一款六履带四摆臂式机器人“木槿”[84],如图17(d)所示,其前后两对摆臂能够独立摆动,通过摆臂的姿态调整使其具有良好的越障性能;东北大学设计了一款小型履带式移动机器人Quince[85],其结构紧凑且体积小,具有很好的机动性与灵活性。
履带式机器人对松软的星球表面有独特的优势,其下陷度小且通过性能良好。北京航空航天大学研制的可重构履带式机器人、沈阳自动化研究所研制的CLIMBER机器人、国防科技大学研制的六履带结构机器人、上海交通大学研制的六履带四摆臂式机器人等均是围绕非结构地形特点开展的关于履带式机器人结构优化及高机动性方面的研究。北京航空航天大学研制的可重构履带式机器人[86]由4个具有独立运动能力的基础模块、2个转动关节模块及5个连杆模块组成,移动系统采用履带式结构,具有地形适应能力强、平稳性好等优点,见图17(e)。上海交通大学的六履带四摆臂式机器人[87]如图17(f)所示,其在主履带前后分别加装了一对摆臂结构,其姿态调整更为灵活,因此对非结构地形的适应能力又进一步提高;其和日本千叶工业大学的“木槿”一样采用摆臂外置结构,但该机器人的4个摆臂可以回收在车体内侧,这是“木槿”所缺乏的,这使得该机器人可以大大减少整个机构安放时的包络尺寸。
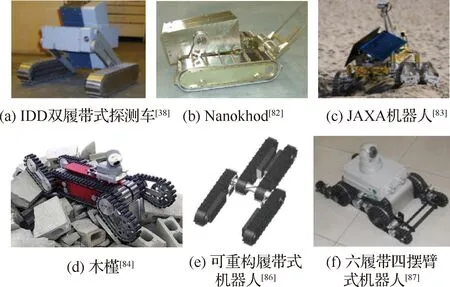
图17 履带式机器人Fig.17 Tracked robots
履带式机器人着地面积较大,同时履带与地面的粘合力强,能在凹凸不平的崎岖地面上稳定行驶,具有较好的地面适应性和越障稳定性,但履带式机器人结构与机构比较复杂,其移动系统的传动效率也不高,这些都限制了履带机器人在实际中的应用。
2.4 其他类型机器人
随着材料科学的发展和机器人技术的进步,星表移动探测机器人的设计萌生了许多新的概念,如子母式机器人、复合式机器人以及弹跳式机器人等,每种类型均有独自的特点。
子母式机器人,由一个母机器人及若干个子机器人构成。母机器人携带子机器人进行探测,对于地形复杂又具有较高探测价值的区域,子机器人可以替代母机器人执行探测任务,这样不仅提高探测效率,还可以降低母机器人的探测风险。日本东京工业大学研制的SMC月球车[88-89]由一个主体和多个子机器人组成,如图18(a)所示。主体包括太阳能电池、通讯装置、样品分析仪、电池充电器和子机器人的工具更换装置,子机器人由一个用于移动的轮子和一个用于操作的机械手臂组成。SMC月球车的主体不能自行移动,但子机器人的机械手臂可以与主体连接充当主动轮以使其移动。每个子机器人都可以从主体中分离出来,自行移动并执行单独的探测任务。子机器人可以在“运动模式”和“操作模式”之间切换。当处于“运动模式”时,通过伸展手臂,可以在地面上实现高机动性移动,其机械手臂的手腕处装有脚轮,通过手腕运动改变该脚轮的方向(偏航角度)以控制其运动方向,见图18(b);当处于“操作模式”时,机械手臂则充当带有夹持器的机械手,进行采样等操作,见图18(c)。

图18 子母式机器人[88]Fig.18 Primary-secondary robots[88]
复合式机器人是基于轮、腿、履的不同组合形式所形成的机器人,可组合为轮腿式、轮履式、履腿式及轮腿履式4类。考虑到控制的可靠性和移动高效性的需求,目前复合式星表移动探测机器人的研究主要集中在轮腿式机器人方面。轮腿式机器人融合了腿式移动机构较强的地形适应能力和轮式移动机构的高速高效性能。
针对月球基地的建设,NASA研制了一款全地形六轮腿机器人ATHLETE[90]用于月球上的运输任务,见图19(a)。NASA研制的另一款轮腿式月球车Chariot[91]如图19(b)所示,其采用6组12车轮,全轮实现独立转向,车轮为可旋转式,整车由两个电动马达驱动,可两级变速,采用模块化的设计使其可以搭载多名宇航员和较多的负载,并可配备不同的装备以完成不同的任务。为提高探测机器人的越障能力,美国JPL研制了四轮腿机器人Gofor[92]、上海交通大学则研制了一种管道形轮腿式探测机器人PWLER[93]、重庆大学联合上海宇航系统工程研究所研制了六轮腿月面机器人[94](图19(c))。其中上海交通大学的PWLER机器人由两个机器人单元组成,每个机器人单元由管道连接而成的机架、圆柱形太阳能电池板、6条可独立运动的轮腿和1个探测球组成,机器人单元之间通过1根连接轴和3个平行的伸缩部件相连。此外,PWLER具有多种独特性能,爬坡时能保持机体处于水平状态;通过增加管道,可很容易地进行容积和探测功能的扩展;同时具有良好的倾覆稳定性。
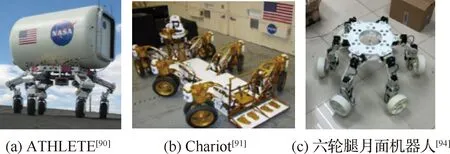
图19 轮腿式机器人Fig.19 Wheel-legged robots
弹跳式机器人的突然爆发性有助于其越过障碍物,因此弹跳机器人具有很强的越障及环境适宜能力,在星表探测领域具有广阔的应用前景。弹跳式机器人从运动形式上可以分为连续弹跳式和间歇弹跳式。NASA研制的三代弹跳机器人[95-97]均属于间歇弹跳式机器人(第一代见图20(a)),美国CMU则研制了一种既可以连续弹跳又可以间歇弹跳的多腿球形机器人RATS[98]。图20(b)为美国加州大学伯克利分校研制的一种六杆张拉机器人[99],其由6根杆件和24根弹性绳组成,每根杆均由电池座、定制连接器和减振器等组成,该机器人通过变形实现弹跳行走。
针对月球、火星表面的低重力环境,麻省理工学院研制了球形弹跳机器人Microbots[100]、日本宇航局和东京大学联合设计了Minerva弹跳机器人[101]、哈尔滨工业大学则研制了一种球形滚动弹跳式机器人[102]。通过对袋鼠跳跃过程中其腿部动作的研究,西北工业大学和台湾大学的研究人员分别研制了仿袋鼠跳跃机器人[103-105]。哈佛大学提出了仿蟑螂爬行跳跃机器人HARM[97],该机器人四足构造一致,两个压电微型制动器可以实现控制足部的全空间灵活运动,能够通过四足的协调控制像蟑螂一样高速爬行、跳跃、爬升和急转弯,携带有效载荷从高处坠落也不至于受损,见图20(c)。
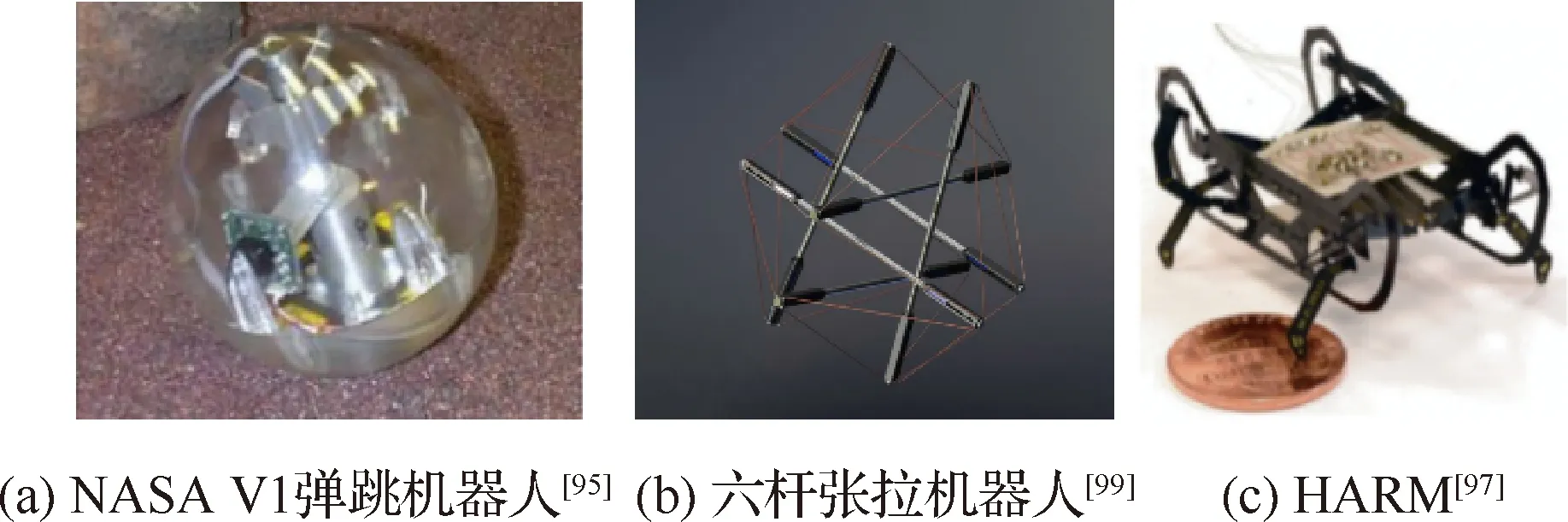
图20 弹跳式机器人Fig.20 Jumping robots
综上所述,星表移动探测机器人的移动方式无论是采用轮式、腿式或履带式,亦或是轮腿复合式、弹跳式等,都必须克服其固有的短处,如轮式的地形适应性不足、腿式的控制较难、履带式和轮腿式的结构较复杂,弹跳式的落地平稳性较差等。同时要使机器人运动灵活、适应能力强,其操控难度也势必会增加,进一步可能会影响星表探测任务的进程。这些都是目前星表移动探测机器人研制领域的矛盾共同体,有待科研人员进一步深化研究。
3 未来发展趋势
随着星表探测任务越来越复杂,对星表移动探测机器人的要求也将越来越高,未来的星表移动探测机器人必须具备更长的移动距离、更高的移动速度、更强的越障能力和更大的科学载荷承载能力,因此对星表移动探测机器人的机构设计提出了更高的要求,其未来可能的发展趋势如下:
1) 星球表面崎岖不平的路况对星表移动探测机器人的越障能力提出了较高要求。轮式机器人可通过底盘的优化提高越障能力;轮腿复合式机器人兼具轮式高速移动和腿式越障能力强的优点,将是一个大的发展趋势方向。
2) 由于航天器对尺寸及重量有严格的限制,减少星表移动探测机器人的质量和体积具有较大意义。在保证正常功能的前提下,通过优化设计、采用较轻材料等手段可降低探测机器人的质量;采用新型的具有大折展比的结构设计可降低探测机器人所占体积。
3) 星球表面上存在较多的未知情况和各种潜在威胁,需保证星表移动探测机器人的高可靠性。子母式机器人和弹跳式机器人将是一个大的发展趋势,子机器人既可以减少航天器的发射重量、节省空间,又可以降低母机器人探测风险、扩大探测范围;弹跳式机器人具有优越的被动地形适应能力和高机动性,将成为极端危险又具有高科考价值的探测区域的首选机器人。
4 结 论
本文对星表移动探测机器人的研究现状进行了系统的综述,包括对已经成功实施探测任务的星表移动探测机器人的技术状态、在轨运行状态等进行了回顾、归纳、分析;对目前在研的可适应于星表探测的机器人进行了梳理和分类讨论,详细分析了不同结构形式星表移动探测机器人的运动特点、技术参数及其环境适应性等。在文献综述的基础上,对星表移动探测机器人的未来可能的发展趋势做了展望,以期能够为从事该领域的研究人员提供借鉴。