小型星表探测机器人发展现状与趋势
2021-03-27辛鹏飞李德伦刘鑫张沛陈磊刘宾
辛鹏飞,李德伦,*,刘鑫,张沛,陈磊,刘宾
1.北京空间飞行器总体设计部,北京 100094 2.空间智能机器人系统技术与应用北京市重点实验室 , 北京 100094
星球表面深度探测既是航天活动发展的必然选择,也是人类进一步了解宇宙、探索生命的起源和演化、获取更多科学认识[1]、开发和利用空间资源的重要手段,对科技进步和人类文明的发展具有重要意义[2]。目前,人类对月球及其以外的星体进行星表探测时多采用单一、大型的着陆器/巡视器方案[3],且为了规避探测任务风险,多局限于平坦地形探测[4],无法获得遍历性或者极端地形的近距离地质地貌信息和样本数据[5],对小行星或彗星等弱引力天体的附着探测能力也比较有限,任务成功率低。
但越来越多的研究表明,星表探测中最具科学价值的信息通常来源于复杂/极端地形探测[6]。如月球的水冰资源,多分布南北极复杂、崎岖的陨石坑中;火星蕴含生命信息的物质可能存在于不易到达的熔岩管、陨石坑以及洞穴中[7];碎石堆型小行星的地质深处隐藏太阳系诞生初期的“信息”[8]。这些区域的深度探测对于研究宇宙星体的起源与演化、生命信息的存在形式和地质作用等方面具有重要意义。
在此背景下,相比较于大型探测器,高性价比、低任务风险的小型移动探测机器人成为国际上广泛认可的、极具前景的星表探测方案。小型星表探测机器人的主要特征是小体积、轻质量(多数<20 kg)和一定的自主能力,在星表极端地形中具备强运动性能以及科学载荷搭载能力。它可以作为大型着陆/巡视探测器的配置组件,在母探测器的引导下,以单独或者集群的形式[9],通过搭载高分辨率相机、磁场探测器、质谱仪、操作臂等多种轻型载荷,或者将关键传感器放置于极端地形中,完成图像显示、数据/样本获取、导航、地质探测等科学目标。
小型星表探测机器人技术作为一种特殊的机器人技术[10],集机械、力学、电子、新材料、传感器、计算机、智能控制与网络通信等多门科学于一体[11],是一种具有基础性、战略性和前瞻性的高新技术。目前,美国、欧洲、日本等航天大国在小型星表探测机器人领域研发了多种类型、多种用途的小型机器人,开展了原理样机测试,部分产品已经应用于航天探测任务中。中国在小型星表探测机器人研制领域尚处于起步状态,无在轨成熟产品应用。
本文重点总结介绍了近年来面向月球、火星、小行星探测而研发的小型星表探测机器人代表性产品,对其设计理念、构型特征、实际应用进行了梳理,分析了未来发展趋势和设计中存在的关键问题,以期为中国小型星表探测机器人的设计、研究与应用提供参考。
1 面向月球探测的小型机器人
月球陨石坑、洞穴中可能存在较为丰富的水冰资源和微量元素资源,因此这类极端地形的探索被认为是极具价值的科学探索[12];未来中长期月球深度探测和月球基地的建设,也需要大量小型机器人进行地质勘测与日常维护,从而降低任务成本和风险。这些实际需求催生了小型轮式和足式月球移动机器人概念,目前日本、欧洲等国家走在了研发前列。
1.1 小型轮式机器人
1.1.1 日本Micro5机器人
针对月球表面的崎岖、阶梯状地形探测,日本宇航科学研究所(Institute of Space and Astronautical Science,ISAS)和明治大学(Meiji University)等研发了一种体积小、质量轻、低能耗的五轮机器人Micro5[13]。如图1所示,它具有一种新的五点悬吊结构——PEGASUS(PEntad Grade Assist SUSpension)悬架系统[14]。PEGASUS是单点连接的简单结构,但具有强机动性,能够辅助巡视与越障。
Micro5样机(图2)质量约为5 kg,外型尺寸为0.55 m×0.53 m×0.25 m[15],车轮直径为0.1 m。可以越过0.15 m的台阶,爬上40°的斜坡[16],车速为1.5 cm/s。车顶的2片太阳能电池板能够提供最大36 W的能量。

图2 Micro5样机性能测试[16]Fig.2 Performance test of Micro5 prototype[16]
Micro5主要工作模式为遥操作形式,搭载包括操作臂、立体相机、俯仰-翻滚测角器等载荷[17],机器人运动前方架设2台CMOS相机用作导航和科学观测任务。操作臂采用碳纤维材质[18],总长度为920 mm,质量为1.45 kg,在地球重力下可搬运300 g物体,操作空间可达到太阳能电池板边缘,以便于清除电池板上的月面灰尘。
1.1.2 日本“耀基”机器人
日本戴蒙(Dymon)公司宣布与美国太空机器人(Astrobotic)技术公司签署了一项合作协议,将于2021年由Astrobotic的“游隼”(Peregrine)月球着陆器把日本首个月球巡视机器人“耀基”(Yaoki)送上月球表面,如图3所示,以增强对月球崎岖地形的探索能力。

图3 “耀基”机器人与“游隼”着陆器尺寸对比Fig.3 Size comparison of Yaoki and Peregrine
如图4所示,“耀基”月球巡视机器人具有2个高强度材料制作的车轮,其余结构均被包裹于2个车轮之间。机器人整体呈上下对称形状,构造简单,包络尺寸为96 mm×150 mm×150 mm,能够以超低成本进行月球探测,也降低了任务故障风险。

图4 “耀基”月球巡视机器人Fig.4 Yaoki lunar rover
“耀基”机器人工作模式主要为遥操作工作,最显著的优势是其超强的运动性能,它可以原地实现侧翻和翻转运动,极大地提升了极端地形(如洞穴、陡坡、深沟等)进入能力,理论上可执行360°连续的传感器探测活动。机器人搭载的载荷包括球形聚光灯、相机和其他传感器,可以接近月球表面进行精密探测。
1.2 小型足式机器人
1.2.1 瑞士SpaceBok机器人
为探索四足机器人在低重力环境下的“动态行走”策略,瑞士苏黎世联邦理工学院(Swiss Federal Institute of Techonlogy, in Zurich)和苏黎世应用科技大学(Zurich University of Applied Sciences)的学生团队研制了SpaceBok四足机器人,如图5所示,其主要工作模式为自主工作和遥操作工作,设计用于在月球或者小行星等低重力天体上行走。目前SpaceBok正在欧洲宇航局(European Space Agency, ESA)的航天技术工程中心(European Space Technology and Engineering Center, ESTEC)进行测试。

图5 Spacebok小型机器人Fig.5 Spacebok robot
SpaceBok机器人机身使用大量的碳纤维结构,显著降低了质量(小于20 kg),采用高功率密度的力矩电机作为关节驱动单元,腿部一体化弹簧可以有效地缓解四足机器人着地时各足端的冲击力和高频响应。它通过反作用轮控制平衡。如图6所示,目前SpaceBok在模拟月球环境下的跳跃测试中,跳跃高度已达到1.3 m,并且能够完成自身稳定,也能够进行静步态行走。
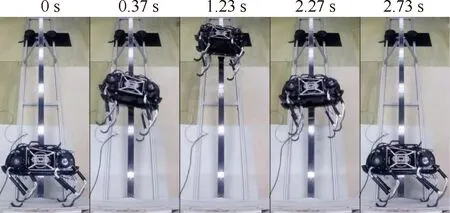
图6 SpaceBok跳跃测试Fig.6 SpaceBok jumping test
1.2.2 英国Spacebit机器人
为了探索月球上陨石坑、洞穴等特殊地形,英国的Spacebit公司研发了一款四足月球探测器,如图7所示,有望进入月球一些管道状洞穴中进行探测。Spacebit机器人同样将于2021年搭乘Peregrine着陆器前往月表,开始演示操作任务。

图7 Spacebit四足机器人Fig.7 Spacebit quadruped robot
Spacebit机器人重量仅有1 kg,具有4条机械腿,如图8所示,采用蜘蛛爬行的模式进行前进,并且具备一定的跳跃能力,这种设计有利于机器人跨越障碍物,让其在月球表面、洞穴、熔岩管中更加灵活地移动。它可以承受月球表面-130~130 ℃的巨大温度波动。Spacebit机器人由太阳能电池板提供动力。预计可在月表工作10个地球日,至少行驶10 m。
Spacebit机器人可以自主工作,也可以在地面遥操作下工作,可搭载的载荷包括:能够进行测量并收集勘探数据的激光传感器和摄像头(可完成月面拍摄、着陆器拍摄和自拍)。

图8 Spacebit机器人样机Fig.8 Spacebit robot prototype
2 面向火星探测的小型机器人
2.1 火星探测小型飞行机器人
火星存在稀薄的大气层[19],美国多个科研机构开展了火星大气环境下的小型飞行机器人(以下称火星无人机)研究,用于协助火星车开展深度探测,已经受到国内外学者的广泛关注[20]。
2.1.1 美国科研机构无人机项目
2001年,美国埃姆斯研究中心(Ames Research Center)论证了利用旋翼式无人机垂直起降(Vertical Take-Off and Landing,VTOL)特性探测火星表面崎岖地形的可行性,用以补充或者替代地面大型巡视器,研究了无人机轻质结构、新型动力系统、自主飞行等关键技术[21],并预测了质量10~50 kg无人机的旋翼转速、飞行效率和工作时间。2002年,埃姆斯研究中心基于四桨叶独立转子,研制了TAMS(Terrestrial-Analog Mars Scouts)系列共轴旋翼式无人机,如图9所示。2005年,埃姆斯研究中心发布了阶段性研究结果,认为在任务探测范围并不太大时,研制一种由火星巡视器释放、用于协助火星巡视器完成探测任务的小型旋翼式无人机具有更大的意义,并预测了部分参数需求[22]。

图9 线性转子试验台与第2代TAMS无人机[22]Fig.9 Baseline rotor test stand and the second generation TAMS[22]
2000年,马里兰大学(University of Maryland)开展了共轴反桨双旋翼火星无人机研究,并在2001年研制了旋翼式火星无人机MICRO[23](MIcro-Coxial ROtorcraft),如图10(a)所示,采用悬停方式对环境进行探测,悬停时间为20~30 min,并具有良好的飞行稳定性和控制性能[24]。2003年,马里兰大学研制了一种质量约为50 kg、能实时进行姿态调整的大型火星无人机MARV(Martian Autonomous Rotary-wing Vehicle),如图10(b)所示,具有10.8 kg的有效载荷,能够在25 km范围内飞行39 min并能悬停1 min;之后,基于埃姆斯研究中心的转子悬停试验,马里兰大学对试验结果进行了详细分析,研究了雷诺数、马赫数及旋翼结构对旋翼系统的影响,提出了一系列优化设计准则。最终论证并研制了质量为200 g的共轴旋翼式火星无人机Microrotorcraft,该无人机能够在模拟的火星环境中飞行12~13 min。

图10 MICRO无人机和MARV无人机Fig.10 MICRO and MARV UAV
2008年,萨里大学(University of Surrey)将旋翼式无人机垂直起降特性与火星探测任务结合,规划了利用火星无人机协助火星车完成火星表面多点采样的方案[25]。2012年,萨里大学研制了一种倾斜旋翼式无人机Eye-On(图11(a)),该无人机质量为15 kg,旋翼翼展达1.4 m,能够在100 km范围内巡航飞行38 min[26]。2016年,萨里大学研制了新一代倾斜旋翼式无人机Y4TR(Y-4 Tilt-Rotor,如图11(b)所示),该无人机采用非线性系统SDRE(State-Dependent Riccati Equation)控制,可实现无人机的自主巡航[27]。

图11 Eye-On无人机与Y4TR无人机Fig.11 Eye-On and Y4TR UAV
2.1.2 美国2020火星无人机
2004年,美国喷气推进实验室(Jet Propulsion Lab, JPL)对比了各类火星无人机的飞行原理、结构形式及适应性能,将旋翼式火星无人机列为火星无人机研究的重要方向并对该类无人机飞行的可行性、空气动力学特性、旋翼系统的悬停特性进行了全面的研究。
2015年,JPL发布火星无人机原型JPL-2015[28],如图12所示,该小型共轴旋翼式火星无人机质量约为1 kg,翼展大小为1.1 m,位于机身下部的存储区集成了控制器、通讯仪器、测控仪器、电源等系统设备,极大地降低了无人机质量;采用太阳能供电,搭载一个高分辨率的测量相机探测地形,并将数据中继到火星车的通信系统;无人机能够在模拟的火星大气环境中完成起飞、悬停、偏转、降落等飞行动作。JPL-2015每次只能使用约3 min,能够上升到100 m的高度。JPL对其进行了巡航侦查的控制方案设计,并对其载荷能力、巡航时间、悬停时间等关键指标进行了研究。

图12 JPL-2015原型机[28]Fig.12 JPL-2015 prototype[28]
2020年7月,美国国家航空航天局(National Aeronautics and Space Administration, NASA)研制的火星无人机(如图13所示)将作为“2020火星车”的配置载荷前往火星。2020火星无人机的基础构型正是JPL-2015火星无人机,重量不到1.8 kg,是一个小型自动旋翼飞行器,机身尺寸约9 cm,搭载了太阳能电池和锂离子电池,2个反向旋转的叶片能够以近3 000 r/min的速度咬入火星稀薄大气,这一转速约是地球直升机转速的10倍。
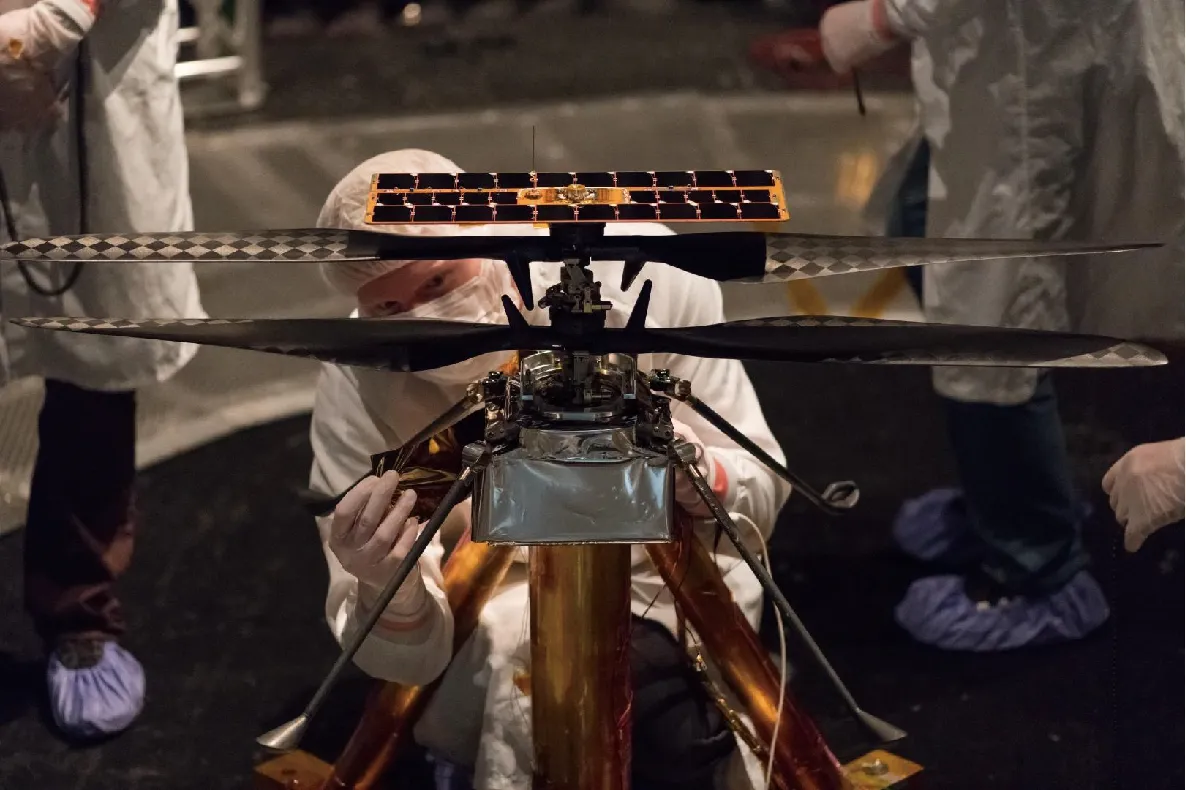
图13 2020火星无人机Fig.13 2020 Mars helicopter
2016年5月31日,在模拟火星大气条件的太空模拟器内,JPL进行了火星无人机样机首次自由飞行,如图14所示,该模拟器位于7.62 m宽的真空室内,另外研究团队通过重力卸载系统实现了火星重力条件。据JPL介绍,为确保无人机在火星的首次飞行成功,工程模型已经记录了超过75 min的样机飞行时间,非常接近真实的无人机飞行时间。

图14 2020火星无人机全系统样机Fig.14 2020 Mars helicopter full system prototype
2.1.3 美国“蜻蜓”无人机
2019年,NASA宣布将发射一架旋翼无人机——“蜻蜓”(Dragonfly)前往土卫六(泰坦)进行全面探测[29]。“蜻蜓”的设计是基于300 kg重的“四角八度飞行器”,如图15所示,本身也是一个着陆探测器,体长约3 m,四角各有一对共轴螺旋桨,构成一架四轴旋翼机。

图15 “蜻蜓”基本构型艺术图[29]Fig.15 Art figure of Dragonfly UAV configuration[29]
“蜻蜓”使用30 kg放射性同位素电池供电,可支撑以10 m/s的速度飞行2 h,电池工作寿命内飞行总里程可能达60 km,其中任务设计的单次飞行距离最远可达8 km[30]。除了长距离飞行外,“蜻蜓”还可以通过“降高”地面几米来重新定位传感器,实现近距离精确移动。
“蜻蜓”搭载的科学载荷将包括质谱仪、伽马射线和中子光谱仪、地球物理学和气象学套件,还包括一整套摄像头设备。
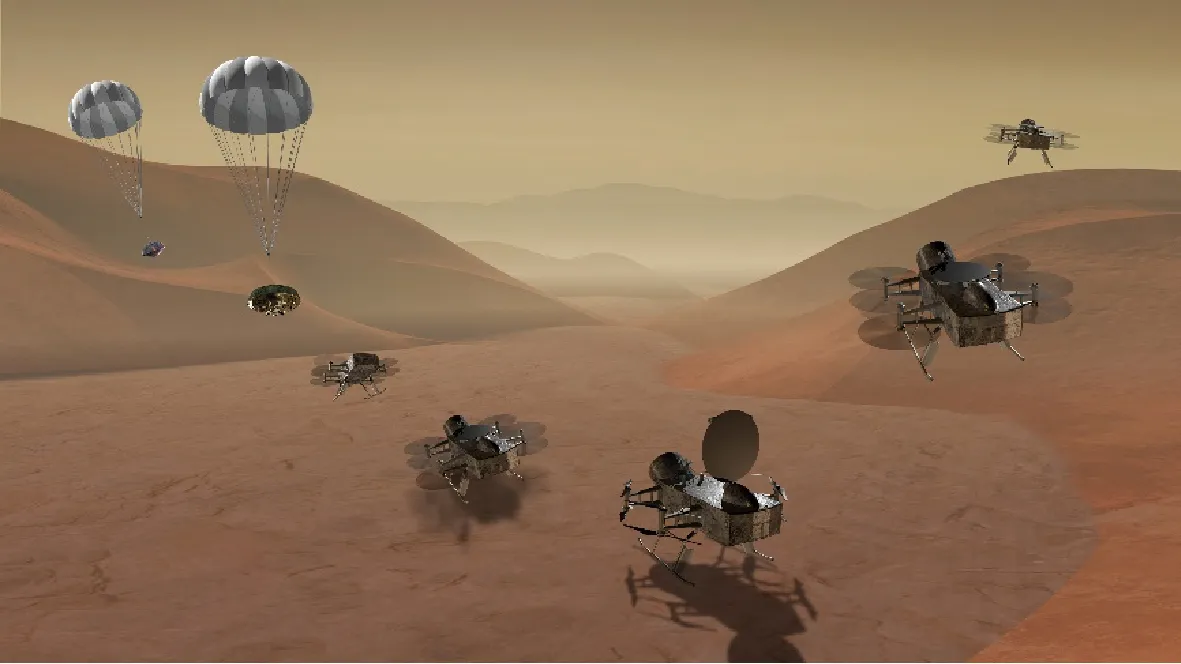
图16 “蜻蜓”在泰坦表面探测的艺术图Fig.16 Art figure of Dragonfly exploration on Titan
图16为“蜻蜓”在土卫六的探测任务流程图,包含进入、下降与着陆段(Entry, Descent and Landing, EDL)、飞行探测、重复着陆、重复探测等。2018年5月,“蜻蜓”开始进行样机外场飞行控制测试,主要包括飞行稳定性测试与导航跟踪测试,如图17所示。

图17 “蜻蜓”的旋翼飞行测试[30]Fig.17 Rotor flight test of Dragonfly[30]
2.2 火星探测小型轮式机器人
研究表明,火星表面高科研价值区域多集中在熔岩管、洞穴和陡坡附近[31],由于安全性、任务成本和探测器性能等原因,大型火星巡视器并不适合这些区域的深度探测[32]。在此背景下,运动性能极强的小型轮式机器人应运而生。
2.2.1 美国PUFFER机器人
为了探测大型火星巡视器不能到达的地形区域,NASA JPL利用3D打印技术制造了一款灵感来源于折纸的可折叠机器人[33],可以协助美国未来的太空探索任务,机器人被命名为PUFFER(Pop-up Flat Folding Explorer Robot),如图18所示。PUFFER由NASA、加州大学伯克利分校等共同研发,研发制造成本约数百万美元。
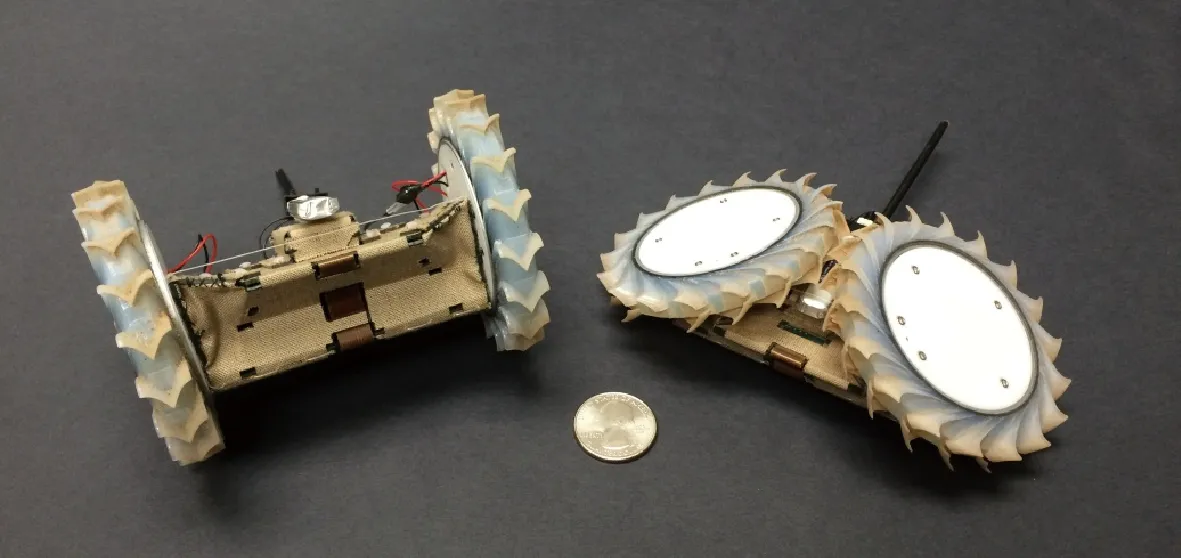
图18 PUFFER火星机器人[33]Fig.18 PUFFER Mars robot[33]
PUFFER作为主探测器的配置组件,最大的特点是在遇到较狭窄的空间时,可以自主、可重复折叠[34],其展开设计构型包络为10 cm×7.5 cm×7 cm,最小折叠状态下包络为14.5 cm×7.5 cm×4 cm,体重约150 g,底盘上安装一块太阳能电池板,使得它可以自行翻转、利用太阳能进行充电,极大地拓展了工作寿命。搭载设备包括IMU(惯性测量单元)、聚光灯、CMOS相机以及传感器等[35],如图19所示。

图19 PUFFER搭载的设备与载荷Fig.19 Equipment and loads carried by PUFFER
PUFFER的工作模式包括自主运动和遥操作形式,可以在母探测器的指引下,单独或集群与母探测器开展联合智能探测和数据采集,其便携性、机动性、抗冲击性能优异,大幅增加母探测器的探测能力和探测范围;折叠构型下能够进入狭小缝隙、洞穴、陡坡以及冰雪等复杂地形,通过搭载设备,获得更多高科研价值探测数据和样本[36]。目前,已经开展了原理样机测试,如图20所示。

图20 PUFFER原理样机测试[36]Fig.20 Tests of PUFFER prototype[36]
2.2.2 德国Coyote III机器人
Coyote III机器人是德国宇航中心(Deutsches Zentrum für Luft-und Raumfahrt, DLR)开发的一款移动性能突出的微型探测机器人[37],其配备了独特的轮子,能够轻松抓住和攀爬过岩石等危险的地形,独特的移动机构设计非常适用于非结构化土地。
Coyote III机器人为四轮结构,如图21所示,尺寸为994 mm×584 mm×380 mm,质量为12.5 kg,最大速度可达1.3 m/s[38],最大功率为75 W,车轮结构采用轻质、镂空设计,适合于沙质、岩石等地质条件下运动[39]。
Coyote III机器人采用模块化和轻质化设计,使得它可以方便地扩展其他负载部件。目前,设计配备有电源系统、通信系统、传感系统和控制系统,可以自主或协同执行探索任务[40]。此外,Coyote III还有2个通用的机电接口,该类接口可以使Coyote III更加方便地扩展其他的外延设备,比如结构化的机械臂等。

图21 Coyote III机器人原理样机Fig.21 Coyote III robot prototype
3 面向小行星探测的小型机器人
小行星星表探测机器人可以完成星表近距离深度观测和分析任务,拓展小行星探测任务的深度和广度。但小行星或者彗星等小天体质量小、引力极弱(约10-4g)、地形复杂并且先验经验很少[41],对此类天体星表进行精确着陆控制和附着探测难度较大[42]。采用传统的轮式[43]或履带式移动装置,会导致机器人的摩擦牵引不足,难以在星表附着和移动[44]。因此,日本[45]、美国等国家相继研制了翻滚式小型机器人用于小行星探测任务,服务于采样地区的环境和地质背景研究。这类机器人的突出特点是采用同性多面体构型,依靠内部飞轮结构,可以实现全向翻滚运动,环境适应性强。
目前,日本“隼鸟2号”任务已搭载2款翻滚式小型机器人,并成功实现在轨应用。
3.1 日本小行星探测机器人
2019年9月22日,日本“隼鸟2号”(Hayabusa2)探测器向“龙宫”(Ryugu)小行星释放了2组微型机器人:MINERVA-II-1和MINERVA-II-2(MIcro/Nano Experimental Robot Vehicle for Asteroid),共耗资15亿美元,如图22所示。这2组机器人均采用了跳跃移动装置,在“龙宫”表面跳跃前进,主要目的是验证小行星表面移动技术[46]。

图22 MINERVA-II机器人安装位置及基本构型Fig.22 Installation and configuration of MINERVA-II robots
MINERVA-II-1包括直径0.18 m、高0.07 m的2个16角柱形状机器人,MINERVA-II-2为直径0.15 m、高0.16 m的8棱柱形状的机器人,2组机器人质量各为1.1 kg,由日本宇宙航空研究开发机构(Japan Aerospace Exploration Agency,JAXA)和多个大学及机构共同研制。MINERVA-II搭载多种科学仪器,其中包括温度和光学传感器、天线、热辐射仪、加速度计、陀螺仪等,以及多达7个相机(包括立体相机和广角相机)。机器人具备无线通信能力,可进行无线电位置测量。图23所示的机器人周围一圈为太阳能电池板,周边的棘刺状探针是温度传感器,可以在跳跃翻滚的同时测量“龙宫”表面的温度,同时也能帮助机器人从跳跃滚动状态快速稳定。机器人的跳跃动作来源于内部旋转电机,电机执行动作时,机器人可以主动地从小行星表面弹起、翻滚,然后落到新的位置,每次跳跃可在水平方向移动15 m左右。
2018年9月19日~21日,“隼鸟2号”按照之前的标记球释放演练流程,进行了MINERVA-II-1机器人部署;2019年10月3日,在“龙宫”赤道上空约1 km高度处释放MINERVA-II-2机器人,分离速度为13~17 cm/s,机器人在环绕“龙宫”1.25圈后成功实现小行星附着部署,并完成移动试验。图24是MINERVA-II-1机器人在小行星表面拍摄的近距离照片。

图23 MINERVA-II机器人结构[46]Fig.23 Structure of MINERVA-II robots[46]

图24 MINERVA-II-1机器人拍摄画面Fig.24 Photos taken by MINERVA-II-1 robot
MINERVA-II机器人具备自主感知能力,不具备自主运动规划与导航能力,在翻滚运动中也不进行自主运动控制。
除MINERVA-II机器人,“隼鸟2号”探测器还在约51 m的高度向“龙宫”表面释放了MASCOT(Mobile Asteroid Surface Scout)机器人,以便于详细测试小行星星表磁场及光照不足处的地表信息[47]。MASCOT机器人由DLR同法国国家空间研究中心(Centre National d'Etudes Spatiales, CNES)合作建造。
MASCOT构型为方型,如图25所示,尺寸为0.275 m×0.29 m×0.195 m,质量约9.8 kg,载有4台仪器,包括宽视场相机、微型红外光谱仪、热辐射计和磁强计[48]。机器人的锂电池电源预计着陆后能供电16 h(实际工作17 h),无法重新充电。
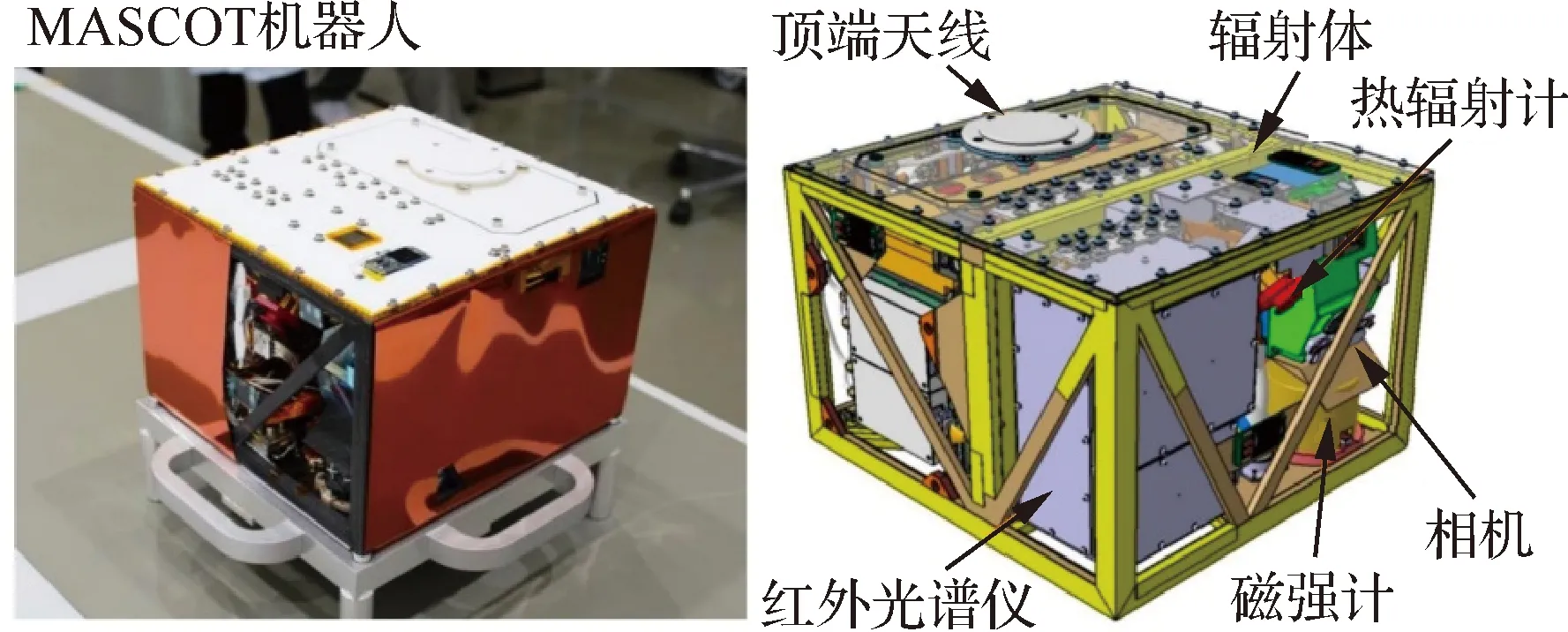
图25 MASCOT构型及载荷[48]Fig.25 Configuration and loads of MASCOT robot[48]
MASCOT自身能够完成一定程度的滚动和跳跃,驱动力来源于内部的一个偏置飞轮,并配备了用于导航定位的GNC(Guidance, Navigation and Control)传感器,方便机器人调姿。但MASCOT只能自主翻滚、移动一次,无自主运动控制能力,翻滚运动的主要目的是为了调整观测角度,尽量让顶端天线朝上,以便于收发数据。
3.2 NASA小行星探测机器人
为发展对小天体表面的探测能力,美国NASA的JPL与斯坦福大学(Stanford University)、麻省理工大学(Massachusetts Institute of Technology, MIT)共同研发一款名为“刺猬”(Hedgehog)的新概念机器人[49],如图26所示,主要面向火卫一探测。
“刺猬”机器人的基础结构是一个外部具有突起尖刺结构的立方体,它具有8个尖刺和内部正交放置的3个飞轮。机器人本身重约5 kg,根据测算,增加相机和光谱仪等载荷后,机器人的重量可能超过9 kg。“刺猬”机器人的每个面都可用于着陆,依靠周围的尖刺在微重力(可低至0.002g)天体表面跳跃或翻滚运动,动力来源于内部3个调速飞轮的旋转和制动系统[50]。尖刺突起的内部还可以安装热探测器等设备,从而在“刺猬”翻滚的时候自主测量星球表面的温度。
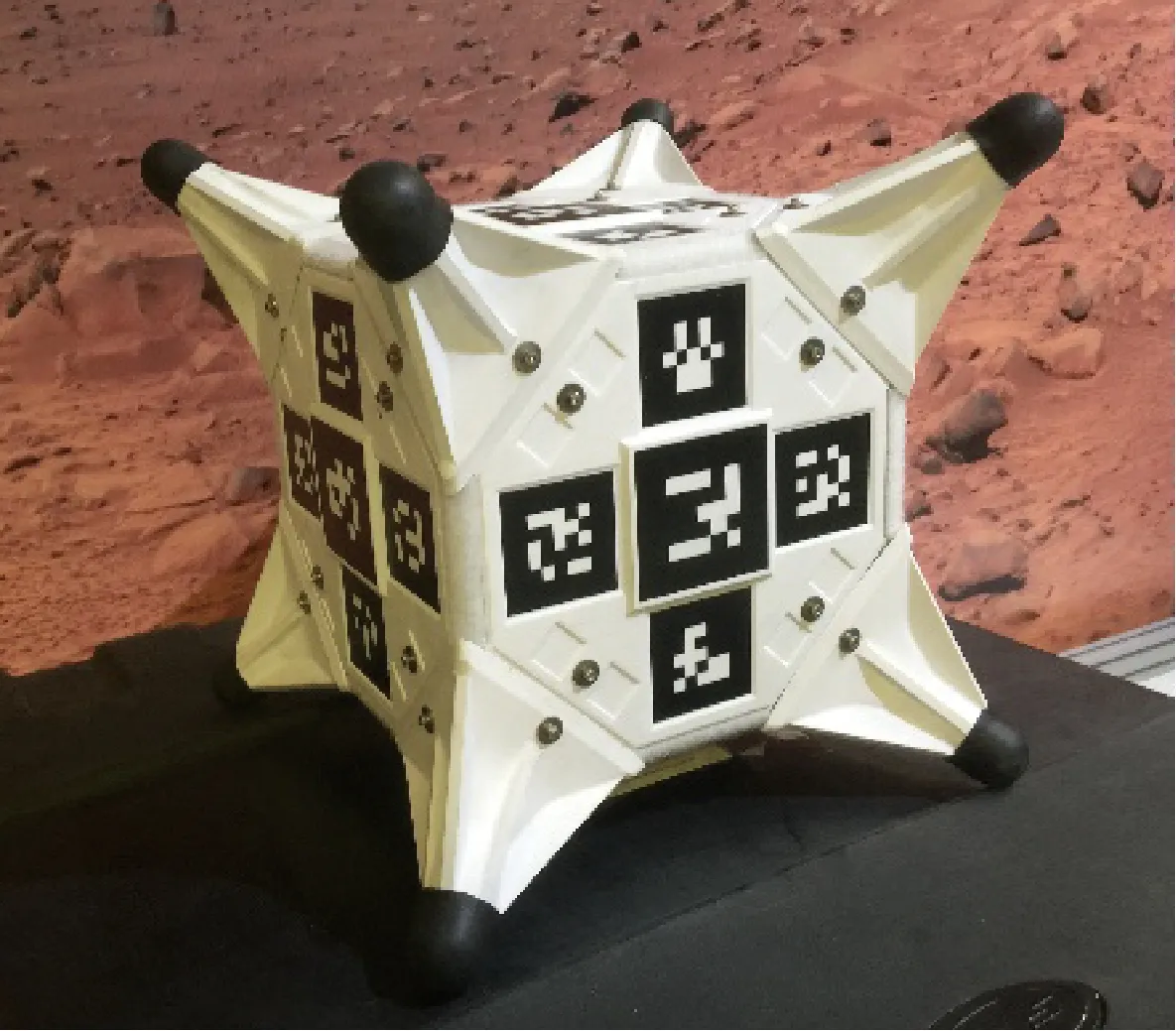
图26 “刺猬”机器人构型[49]Fig.26 Configuration of Hedgehog robot[49]
“刺猬”机器人的工作模式为自主或集群协同工作,能够实现自主感知、可控旋转和急停等动作,可以作为大型着陆器的子机器人开展联合探测任务。在图27所示的样机测试中,“刺猬”机器人既能利用1个或2个尖刺实现长距离的跳跃,也能通过翻转1个表面实现短距离行进,从而实现精准运动控制。在“抛物线”飞行试验中,研究人员还证实“刺猬”能够从星表强力跳起,摆脱沙坑、沟壑等不利地形[51];试验还证明,“刺猬”在砂砾地形、石质地形、平滑地形以及沙漠地形中都具备强通过能力,适应性极强。

图27 “刺猬”机器人实际样机Fig.27 Practical prototype of Hedgehog robot
4 中国研究进展
中国在小型星表探测机器人领域起步较晚,但近年来不少科研机构与高校在该领域的理论研究与设计、原理样机研制与试验方面取得了积极进展。目前已有部分产品进行了地面状态原理样机研制与测试,但在工程实际应用方面,与美国、欧洲、日本等国家还存在差距,目前没有产品获得型号立项支持。
在火星无人机研究领域,中国科学院地球化学研究院的欧阳自远和肖福根[7]、南京航空航天大学的陆宇平等[52]对于历次火星探测任务进行了回顾,对中国未来火星探测面临的主要科学问题进行了阐述。南京航空航天大学的姚克明[21]对中国未来火星无人机探测进行了任务规划与建模分析,建立了火星无人机控制的非线性模型。近年来,哈尔滨工业大学已经开始设计一种旋翼飞行器[24]以适应火星稀薄大气环境,如图28所示。但目前,中国对火星无人机的研究主要关注任务规划和概念设计等方面,在火星无人机原理样机的研制与试验方面仍然处于空白状态,几乎没有相关研究文献发表。

图28 哈尔滨工业大学的火星无人机概念渲染图[24]Fig.28 Rendering figure of Mars UAV of Harbin Institute of Technology[24]
针对复杂地形条件的小型探测机器人研究领域,中国高校及科研机构已经开展结构设计、仿真分析、样机调试等方面研究,但针对空间探测特殊环境条件(如高低温、强辐射等)以及自主智能控制需求的小型机器人研究成果发表较少。北京航空航天大学的张利格等[53]对适用于星表崎岖地形探测的单重四面体机器人进行了分阶段运动学分析,利用ADAMS仿真软件对四面体机器人进行了运动仿真,并进行了样机的功能试验验证,如图29所示。中国科学院沈阳自动化研究所[54]开展了小型张拉整体机器人研究,先后研制了2代机器人样机,如图30所示,实现了翻滚运动与精确控制,该型机器人越障能力强,适用于星表极端地形和特殊地形探测,由此带动了中国一批科研机构对张拉整体机器人的研究。面向火星表面复杂、高风速的大气状态,西安电子科技大学李团结和刘卫刚[55]详细研究了适合探测复杂地形的风力驱动球形机器人,将弹跳、滚动和滑动运动模式有机结合,并考虑环境中随机风的作用,实现了风力驱动球形机器人的运动仿真。
另有一些小型机器人的研究成果在运动形式、样机设计等方面已取得初步进展,但需要进一步深度研究才能实现向原理样机、工程样机的转化。哈尔滨工业大学机器人研究所对小型地面机器人领域进行了初步研究,李满天等[56]研制了一种模块化可重构履带式微小型机器人,可以单独或重构进行运动探测,越障能力较强,但尚未解决有效载荷配置及工作能源问题;曹雯[57]对微小型轮腿式机器人进行了研究和设计,提出了一种基于四轮腿式移动机构方案,并开发了移动机器人样机和基于虚拟样机的控制技术,但欠缺对结构参数、动力学特性和控制系统设计的深入分析;Zhao等[58]研究了弹跳式机器人,通过飞跃等形式越过障碍,适用于小行星的弱引力星体探测,目前样机不足在于运动受地形影响较大,地形适应性差,狭小环境下运动空间受限。重庆大学周伟等[59]设计了一种用于野外侦查和监控的小型两轮机器人MSTRbot,可以搭载2自由度机械臂完成越障和抓取动作,预期可用于火星探测任务,但未解决动态平衡问题,运动稳定性差。上海交通大学的Zhu等[60]研究了轮-履带-足结合的机器人设计和运动控制问题,机器人如图31所示,地形适应性强,负载/质量比高,但尚未提出小型化解决方案。

图29 北京航空航天大学单四面体机器人样机行走试验[53]Fig.29 Walking test of tetrahedral robot prototype of Beihang University[53]

图30 中国科学院沈阳自动化研究所研制的第2代张拉整体机器人[54]Fig.30 2nd generation tensegrity robots developed by Shenyang Institute of Automation,Chinese Academy of Sciences[54]

图31 上海交通大学轮-履带-足混合机器人[60]Fig.31 Wheel-track-leg hybrid mobile robot of Shanghai Jiao Tong University[60]
5 关键技术梳理
综合国内外在小型星表探测机器人领域的研究成果,小型机器人的发展与人类空间探测的重点相吻合。在月球探测、太阳系内行星探测初期,星表探测以综合性探测工具(大型探测器、着陆器、巡视器等)为主,小型机器人发展缓慢。随着人类深空探测能力的逐渐提高,能够进入极端地形、提供广域星表探测信息的小型机器人,作为大型探测器的配置组件登上了历史舞台,尤其近年来,新的运动形式、构形设计和载荷搭配的小型机器人不断涌现,基本分类及性能比较总结在表1中,这些小型机器人的共同特点是面向特殊地形探测需求,具备针对性极强的地形适应性和功能适应性,具体而言:
1) 小型飞行式机器人适用于存在大气层的星体(如火星),探测范围广,承载能力低,功耗高,多用于导航、广域地形探测等任务。
2) 小型轮式机器人结构强度高,运动速度快、效率高、承载/质量比高,适用于导航、崎岖地形探测任务(如火星、月球探测)。
3) 小型足式机器人机构复杂,越障能力强,运动控制难度和功耗较高,适用于特殊极端地形探测(如火星、月球探测)。
4)小型翻滚式机器人适用于小质量、弱引力天体探测(如小行星探测),结构设计简单,运动效率高,功耗较低,但姿态控制复杂。

表1 小型星表探测机器人分类及性能比较Table 1 Classification and performance comparison of small-scale planet surface exploration robots
归纳小型星表探测机器人研究领域涉及的关键技术,总结为以下3点:
1) 机器人小型化、模块化结构设计技术。小型星表探测机器人的主要工作模式是作为配置组件并搭载多种载荷,辅助大型探测器完成星表近距离探测。小型化、模块化设计能够显著降低机器人的制造成本和运行风险,缩短研制周期,提升任务性价比;但同时,深空探测任务对机器人的结构强度、搭载载荷特性、运动特性等也提出了极高的要求。因此如何兼顾设计需求与功能需求,是小型机器人结构设计的关键因素之一。目前,中国在该技术方面已取得较多成果,研发了两足、四足、轮式、张拉整体运动以及锋利驱动等一系列兼顾小型化和特定功能的机器人。
2) 复杂环境下的强适应能力。根据星体与太阳的距离,星体自转周期以及区域光照条件,星表温度变化可能超过-100~100 ℃;火星大气具有低压、高速的特点,呈现出复杂的气动特性;月球、火星存在低引力环境,小行星存在弱引力环境;陨石坑、熔岩管等处于弱光照条件下;探测区域涵盖复杂的地形、地貌特征等。这些环境因素都对机器人结构设计、温度控制、环境感知、自主探测和地面试验提出了严峻挑战,需要小型机器人具备复杂环境的强适应能力。目前中国在机器人运动性能技术方面取得了积极进展,在设计、仿真和试验等方面研究了机器人的复杂地形进入能力,但在温度、辐射和引力条件等适应性指标方面成果不多,尚无样机测试或在轨测试试验。
3) 自主运动及智能控制技术。深空探测中星体与地球间通常存在通讯延迟大的特点,且熔岩管、洞穴等极端地形阻碍信号传输,无法完成实时响应控制,给导航定位造成了极大困难。而面向环境变化剧烈的火星、弱引力小行星的探测,对机器人的运动控制精度和周期要求很高。因此,提升机器人的定位、导航、修复、任务规划、重构等自主运动及智能控制能力是小型机器人探测任务成功的关键。目前,中国在该技术方面与国际先进水平差距较大,智能控制研究多集中于地面飞行器控制领域。
6 发展趋势展望
基于国内外发展现状和关键技术梳理,总结面向月球、火星、小行星等不同需求的小型星表探测机器人的发展趋势,可以发现:
1) 科学探测成为星表探测的原生驱动力。深空探测已经从早期的以验证工程技术为主,逐渐发展到以科学探测为主、工程技术验证为辅的新阶段,未来科学探测将成为深空探测发展的主流,如探索宇宙星体的形成与演变、生命的起源与进化等。因此,小型机器人能够作为高科研价值的极端地形探测器之一,近距离、大范围获取星表及星表以下环境和样品的信息,极大地增强人类空间科学探测能力的深度和广度。
2) 小型化、模块化、强地形适应性成为小型星表探测机器人设计需求。受限于航天器运载能力和高昂成本,小型机器人多搭载于大型探测器上,这要求机器人满足小型化、高结构强度需求;实际探测中要求机器人具备巡视探测、样品采集、图像传输等多方面的工作能力,模块化是实现该目标的重要途径,可以根据任务需求快速组合、迭代和更换,提高机器人性能,降低开发和应用成本;随着深空探测的深入,要求机器人的移动性能越来越强,覆盖的范围越来越广,甚至需要对峡谷、熔岩管、悬崖、陨石坑、沙坑等地带进行探测,因此,足式、轮腿式、飞行式、翻滚式等具备更优越移动性能的小型机器人运动形式在未来有广阔的星表探测应用前景。
3) 智能操作能力是未来小型机器人发展的核心能力。目前空间机器人智能程度相对较低,多采用遥操作和自主控制相结合的控制方式,对环境的应变能力差,控制周期长,大多只能完成简单的、重复性工作。这一方面降低了机器人的工作效率,另一方面增加了地面操作员的工作强度和难度。而未来的深空探测中,需要小型机器人具备自主感知、规划与导航能力,一定的精密载荷/仪器操作能力,和自主任务分析、执行与重构能力。因此进一步开发和应用人工智能、机器学习等技术,提高小型机器人的环境响应、自主判断、智能分析和柔性操控能力是一个重要的发展趋势,具备智能操作能力的小型机器人将是未来机器人领域的主力。
4) 集群协同工作是小型机器人执行未来深空探测任务的主要形式。受限于包络、体积和负载能力,小型机器人在单独模式工作时,探测能力和操作能力较弱。而集群协作时,群体中单个机器人结构可以进一步简化、小型化、任务专门化,大大提高机器人工作的可靠性,增加作业执行的灵活性;可以根据基地建设、复杂区域探测等环境状态和任务需要,双机器人或多机器人自由组合,构成形态可选择采用同构式或异构式的形态,既便于多机器人重构和组合使用,也能显著提高机器人的探测能力、探测效率、分析能力、搬运能力和操作能力。因此具有集群协同工作能力的小型机器人系统将是未来深空探测的主要形式和重要发展方向。
7 结 论
面向星表遍历性数据和样本获取与极端地形深度探测任务需求,围绕小型星表探测机器人设计与研制问题展开综述,概述了当前国内外作为大型探测器配置组件的小型机器人构形设计与研究、样机试验现状,系统总结了面向星表特殊任务环境的飞行式、轮式、足式和翻滚式小型机器人性能特点、关键技术及发展趋势。本文的研究将对中国小型星表探测机器人的设计与研制中的关键技术问题和未来工作的开展具有参考作用。