三维激光扫描技术点云数据采集与配准研究
2021-03-26张亚,山锋,王涛
张 亚,山 锋,王 涛
(1.陕西铁路工程职业技术学院,陕西 渭南 714099;2.陕西交通职业技术学院,陕西 西安 710054)
三维激光扫描技术是近年来测绘领域出现的新技术,克服了传统测量技术单点测量的局限性。该技术根据激光测距的基本原理,采用非接触、主动测量的方式快速获取被测物体表面高精度的空间点位信息、表面纹理信息的点云数据和图像信息[1-2],已被广泛应用于建筑物三维建模、文物保护、地质灾害监测和土木工程等领域。随着三维激光扫描仪硬件和软件的发展与完善,不同模式下建筑物点云数据的采集与配准已被越来越多的研究者关注。在建筑物表面点云数据的采集过程中,受扫描仪视场的限制,不能一次性扫描完成整栋建筑物表面的点云数据,需在不同视场进行扫描,以获取建筑物表面所有点云数据。根据作业方式的不同,三维激光扫描仪分为3种模式:①基于标靶的点云数据采集模式;②基于形状匹配的点云数据采集模式;③基于测站后视或后方交会的点云数据采集模式[3-5]。前两种模式获取的点云数据处于扫描仪测站坐标系中,第三种模式基于全站仪极坐标法的原理,因此获取的点云数据处于统一空间坐标系中。
点云数据配准,即将不同视点下扫描得到的点云数据统一到一个坐标系内的过程。通过点云配准得到整个建筑物表面点云数据,进而进行建筑物三维模型重建[6-7]。由此可见,配准后点云数据的精度将直接决定后续建模的精度,因此采用何种点云数据采集与配准模式将会对后续建模产生很大的影响。鉴于此,本文从三维激光扫描技术的3种数据采集模式出发,对3种模式下的点云数据采集与配准处理进行了研究,并对处理后的点云数据配准精度、点位和距离精度进行了对比分析。
1 研究方案
1.1 测区概况
本文选取的建筑物是位于某校园内的一栋15层的教学楼,长为70 m,宽为26 m,高为52 m;教学楼东北角有一栋两层的裙楼,长为24 m,宽为21 m,高为10 m。教学楼整体形状规则,棱角分明,易于选取特征点和特征边,周边遮挡较少,有利于布设控制点、架设仪器和标靶。
1.2 仪器选择
本文采用拓普康GLS2000三维激光扫描仪进行点云数据采集,最大扫描距离为500 m,具备水平360°和垂直270°的全范围扫描能力,具有自动量取仪器高、扫描棱镜技术和测站后视法扫描功能,包括长距、近景、高清等5种不同测程的扫描模式,内业数据处理软件采用Scan Master软件。前期控制测量数据采用索佳NET05x全站仪进行平面数据采集,天宝DINI03电子水准仪进行高程数据采集,科傻数据处理软件进行数据处理。另外,还配备了棱镜、标靶、钢尺、记录板等相关测量附属设备。
2 数据采集
数据采集包括控制测量数据采集和点云数据采集两个阶段。
2.1 控制测量数据采集
本文要进行点位精度对比分析,就需将建筑物点云数据配准到统一的空间坐标系中,那么建筑物周边则需布设更多的控制点。根据三维激光扫描仪的特性以及建筑物周边情况,本文共布设了8个控制点,控制点分布如图1所示,其中3个控制点架设三维激光扫描仪,5个控制点架设标靶,利用全站仪进行平面数据采集,水准仪进行高程数据采集。经过严密平差,得到8个控制点的三维坐标信息,如表1所示。
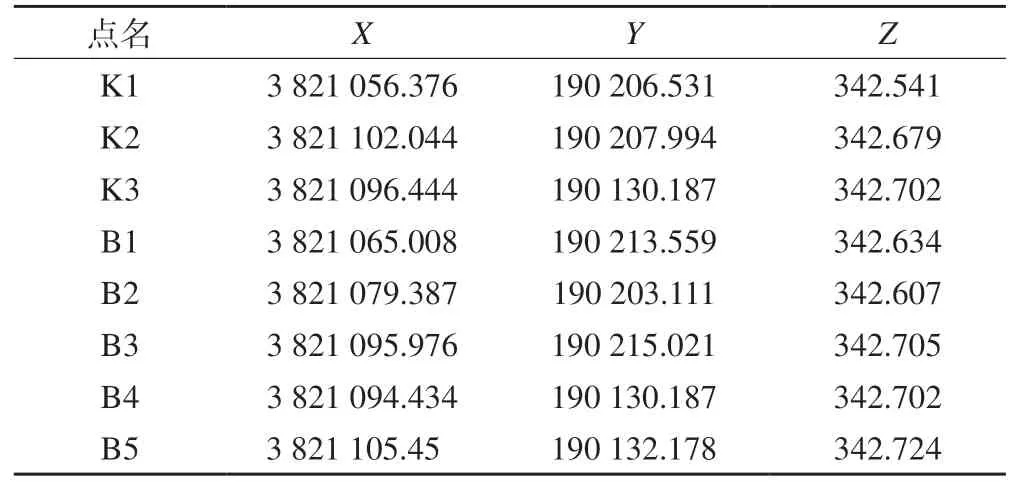
表1 控制点坐标信息

图1 控制点分布图
2.2 点云数据采集
在每种模式下设置3个测站进行建筑物外业点云数据采集,每个测站每次架设三维激光扫描仪分别采用3种模式进行数据采集,这样将减少仪器架设产生的偶然误差对后续数据处理的影响。
2.2.1 基于标靶的点云数据采集
基于标靶的点云数据采集模式需对两个相邻测站的同一组3个标靶进行扫描,再通过这3个共同的标靶对两个相邻测站进行配准处理[8]。首先将三维激光扫描仪架设在K1控制点上,分别对测站所控制的区域以及标靶B1、B2、B3进行扫描,考虑到标靶拟合精度和扫描速度,设置扫描分辨率为1 cm×1 cm,扫描模式为高清模式(后续两种模式的扫描参数与该模式相同);再将仪器搬到K2控制点上,分别对测站所控制的区域以及所有标靶进行扫描(本测站是第一和第三站的连接站,需将测区范围内的5个标靶全部扫描);最后将仪器搬到K3控制点上,分别对测站所控制区域以及标靶B3、B4、B5进行扫描,以完成建筑物和标靶的扫描。在外业数据采集过程中,该模式需对标靶进行精细单独扫描,并对每个标靶进行编号,这些工作需要耗费一定的时间,因此完成3个测站扫描用时为67 min。
2.2.2 基于形状匹配的点云数据采集
基于形状匹配的点云数据采集模式的基本原理是根据相邻两个测站扫描重叠范围内的同名点进行配准。扫描过程中,分别在K1、K2、K3控制点上架设仪器,每次设站与相邻测站的扫描重叠度在30%以上,以便于后续配准时同名点的选取,设置好扫描参数后进行每个测站的扫描,每个测站分别对标靶B1、B3、B5进行扫描,以便于后续把所有点云数据配准到统一的空间坐标系中。该模式下点云数据的采集虽然需要相邻测站扫描点云数据的重叠度在30%以上,但无需扫描太多的标靶,与基于标靶的模式相比效率高一些,3个测站扫描用时为54 min。
2.2.3 基于测站后视的点云数据采集
基于测站后视的点云数据采集模式的基本原理是全站仪极坐标法测量坐标。首先将扫描仪架设在K1控制点上,棱镜架设在K2控制点上,将测站点坐标和后视坐标分别输入扫描仪中,设置扫描参数,扫描后视棱镜,以完成扫描仪测站定向;然后扫描该测站的点云数据,扫描完成后将扫描仪搬到K2控制点,棱镜架设在K1控制点上,根据同样的原理进行该站的点云数据采集;依次扫描3个测站的点云数据。该模式下点云数据的采集需要扫描后视棱镜进行测站定向,获取的点云数据所在的坐标系与控制点所在的空间坐标系是一致的,外业数据采集速度介于标靶模式和形状匹配模式之间,3个测站扫描用时为60 min。
3 点云数据配准处理
3.1 基于标靶的点云数据配准
点云数据的坐标处于以扫描仪光电中心为原点的右手坐标系中,其中Y轴为扫描仪初始化后照准的方向,Z轴为扫描仪的竖轴,X轴为与Y、Z轴相互垂直的方向[9]。基于标靶的点云数据采集模式获取的点云坐标均处于扫描仪架设时的测站坐标系中,即当时测站的独立坐标系,若进行不同测站的配准,就要根据相邻两个测站的同名点求解两个测站相互独立坐标系下的坐标转换关系,即平移矩阵和旋转矩阵;再把平移矩阵和旋转矩阵代入到转换数学模型中,即可得到两个测站统一坐标系下的坐标[10]。

式中,tx、ty、tz为平移参数;α、β、γ为X、Y、Z轴的旋转角;(X1,Y1,Z1)和(X,Y,Z)为旋转前后同一个点的坐标。
由上述公式可见,至少需要3个同名点来求解转换参数。基于标靶的点云数据采集模式就是利用相邻两个测站3个共同标靶来求解转换参数,再将转换参数代入模型即可实现点云的配准。配准后3个测站的点云数据均统一到测站1所在的坐标系中,然后根据标靶B1、B3、B5进行坐标转换,将建筑点云数据统一转换到所建立的统一空间坐标系中。
基于标靶的点云数据配准,相邻两个测站的共同标靶拟合的精度高,且在扫描过程中已编号,软件将自动识别同样编号的标靶并进行配准,配准精度和效率较高,3个测站的配准用时为7 min。
3.2 基于形状匹配的点云数据配准
基于形状匹配的点云数据采集模式采集的点云数据也是处于每个测站的独立坐标系中,其配准处理过程与基于标靶的类似。配准时选取的不再是标靶,而是点云同名点。点云同名点从相邻测站点云数据的重叠部分选取,一般是建筑物的拐角、窗户等棱角分明的地方。选取同名点后,根据式(1)、式(2)计算转换参数,完成点云配准;再根据标靶B1、B3、B5的坐标将配准后的点云数据转换到统一的空间坐标系中。
基于形状匹配的点云数据配准,需从建筑物表面点云数据中选取3个及以上的同名点,选取同名点需要精确到房角或窗角处的点云,但相邻测站选取的同一位置的同名点也并非严格意义上的同名点,这些情况必然会影响点云配准的效率和精度,3个测站的配准用时为13 min。
3.3 基于测站后视的点云配准处理
基于测站后视的点云数据采集时进行了后视定向,通过后视定向,每个测站扫描得到的点云坐标均为统一空间坐标系中的坐标。这种方式配准的实质就是对每个测站的点云数据进行统一的过程,即全站仪极坐标法测量点坐标的过程。具体每个点云坐标的计算公式为:

式中,(X1,Y1)和(X2,Y2)分别为统一空间坐标系下K1和K2的坐标。

式中,αi为点云中第i个点在统一空间坐标系下的坐标方位角;βi为第i个点和控制点K1连线与K1和K2连线的夹角,i=1,2,3,…,n,n为K1控制点的点云数量。

式中,X1、Y1、Z1为控制点K1的三维坐标;Si为控制点K1到第i个点的斜距;θi为第i个点的竖直角。
根据式(5)即可得到第i个点空间坐标系下的坐标,再利用软件对3个测站的点云数据进行统一,即可完成配准。基于测站后视的点云数据配准所得到的建筑物点云数据模型如图2所示。在该模式下,扫描仪采用后视棱镜的测站定向,测站定向后各测站扫描得到的点云数据已统一到空间坐标系中,因此配准处理只需把每个测站的点云数据进行统一即可,效率快且精度高,3个测站的配准用时为4 min。

图2 基于测站后视的点云数据配准建筑物点云模型
4 配准精度分析
本文利用三维激光扫描仪、Scan Master软件实现3种模式下的点云数据采集与配准,结果表明,基于标靶的点云数据配准精度为0.002 m;基于测站后视的点云数据配准精度为0.003 m,基于形状匹配的点云数据配准精度为0.009 m。
本文将3种模式下的点云数据都配准到统一的空间坐标系下,并对配准后的点云数据进行了精度分析。①点位精度分析,选取了6个建筑物棱角、窗角处的点,位置分布均匀,其中1、2号点位于建筑物顶部,将这6个点的坐标与通过精密测量得到坐标进行对比,结果如图3~5所示;②边长精度分析,选取了建筑物的特征边进行对比分析,特征边位置分布均匀,1、2号边位于建筑物顶部,将选取的特征边边长与经过精密测量的边长进行对比,结果如图6所示。
对比3种模式发现,基于标靶的点云数据配准精度与基于测站后视的点云数据配准精度接近且较高,基于形状匹配的点云数据配准精度较低。数据采集过程中采用标靶、棱镜进行配准,标靶、棱镜的坐标经过严密平差,精度较高,从而使得基于标靶的点云数据配准与基于测站后视的点云数据配准精度较高;而基于形状匹配的点云数据配准过程中选取的同名点为建筑物表面棱角、窗角处的点云,且相邻两个测站扫描过程中,由于扫描仪分辨率的原因,使得两个测站同一棱角处的点云存在偏差,从而导致基于形状匹配 的点云配准模式精度较低。

图3 特征点X方向差值

图4 特征点Y方向差值

图5 特征点Z方向差值

图6 特征边精度比较
5 结 语
本文以建筑物为研究对象,系统阐述了不同模式下建筑物表面点云数据采集与配准的处理过程;并将3种模式下的点云数据配准到统一的空间坐标系中,通过配准精度、特征点、特征边的对比进行精度分析。结果表明,基于标靶和基于测站后视的模式的精度高于基于形状匹配的模式;而在数据采集、配准效率和整体精度方面,基于测站后视的模式比另外两种模式更具优势,更适用于建筑物点云数据的采集与配准处理。
