面向低碳高效的U型拆卸线平衡优化*
2021-03-26吴远峰陈二蒙
吴远峰,陈二蒙,倪 静
(合肥工业大学机械工程学院,合肥 230009)
0 引言
科技进步促进了产业升级,由此产生了大量废弃的产品。如不能合理回收,会造成资源浪费、环境破坏。产品的回收和再制造技术已经受到人们重视。再制造包括拆卸、清洗、检测等操作[1]。拆卸是再制造的首要环节,拆卸线是大批量、自动化拆卸的最佳方案[2]。这种模式也受到工业界的重视。
为了充分地利用资源、优化再制造系统,Gungor A等[2]提出了拆卸线平衡问题(disassembly line balancing problem, DLBP)。DLBP是一种组合优化问题,许多学者都进行了相关研究,主要方法有数学规划法、启发式算法和元启发算法[3]。前两者多用于求解小规模实例,可在较短时间内得到最优解。DLBP是一个NP难问题[4],求解难度会随产品的复杂程度而大幅增长,元启发式算法可以在更短的时间内获得最优或近似最优解。因此,它被广泛应用于DLBP中,如蚁群算法[5]、遗传算法[4, 6]、人工蜂群算法[7-8]、离散蜜蜂算法[9]、混合蛙跳算法[10]。
上述DLBP的研究大多基于直线型拆卸线。直线型拆卸线遵循线性处理模式,流程较为简单[3]。U型拆卸线首尾相接,结构紧凑、占地空间较小、人员和物料分配灵活、便于管理[11]。当前关于U型拆卸线平衡问题(UDLBP)的研究较少。在多目标优化方面,文献[6-8]按顺序比较每一个目标量,文献[9]通过加权将多目标整合成单目标优化。然而,目标量之间可能会相互冲突,无法使每个目标量达到最优。使用Pareto非支配关系可以综合权衡各指标之间的优劣关系[12]。除此之外,常见的优化目标有工作站数量、空闲时间、危害度、利润等[3]。目前,将绿色指标引入DLBP的研究较少,上述的研究也都是主要针对这些常见目标的优化,却很少有研究考虑到了碳排放等因素。
细菌觅食算法(bacteria foraging optimization,BFO)是一种群智能优化算法,其模仿了大肠杆菌在觅食和繁殖过程中的行为,其优化性能好[13]。相较于其他算法,目前应用BFO求解DLBP的研究较少。因此,本文研究面向低碳高效的UDLBP,以工作站数量、空闲时间、平滑度和碳排放量为目标量,结合Pareto非支配关系,利用改进多目标BFO(improved multi-objective bacteria foraging optimization, IMOBFO)算法,用于求解多目标UDLBP问题。
1 面向低碳高效的多目标UDLBP数学模型
1.1 问题描述和假设
目前针对DLBP的主要研究步骤如下:根据产品的零件接触、约束信息,得到拆卸序列;针对此序列,按照拆卸线的解码模式,求各个目标量,评估拆卸方案的平衡性。以图1所示的产品为例,零件1和3不受约束,所以可以拆去其中一个;更新零件的约束关系图,从而得出下一步可拆去的零件,直至拆去所有零件。U型线的产品的入口和出口位于同一侧,工作人员可以交替在拆卸线的两侧作业,为生产增加一定的灵活性[14]。图2为两种拆卸线布局。

图1 某产品结构示意图

(a) 直线型拆卸线
针对U型拆卸线的特点,后续数学模型均基于以下假设:每个零件只能被分配到一个工作站,且工作站内总作业时间不大于节拍时间(cycle time, CT);零件的供应不间断;只对单一产品进行拆卸规划;待拆卸产品的零件不存在缺件、破坏等情况;不考虑零件之间相互作用。
1.2 面向低碳高效的多目标函数
设一个产品由n个零件构成,采用连续正整数编号,则产品可记为N={1,…,n},则直线型拆卸序列可记为Xpre=[p1,…,pn](pi∈N)。特别地,由于U型线的结构,U型拆卸线的拆卸序列X的编码形式与Xpre有所区别,在2.1节进行说明。
(1)最小工作站数。在拆卸过程中,所需的工作站数量越小,拆卸线的建造成本也会降低。
(1)
式中,M为理论最大工作站数(见式(10)),si为0-1变量,表示工作站i是否开启。若开启,si=1,反之则为0。
(2)空闲时间。合理、高效利用拆卸线必须要减少空闲时间的总量。
(2)

(3)
(4)
式(2)是单个工作站内的总拆卸时间,由零件拆卸时间和方位变换时间构成。其中,CT是节拍时间;STj是工作站j的总作业时间;Pj是工作站j所包含的零件集合;ti是零件i的拆卸时间;β是拆卸方位变换算子,dt是基本方位变换时间(见式(2)和式(3));mj是工作站j所包含的零件总数。式(4)是最小空闲时间目标函数。
(3)平滑度。平滑度是衡量平衡状态的重要指标,它反映了任务分配的均衡性。如果工作站之间分配的任务差距较大,f2的值也越大,表明此拆卸方案平衡性较差。其表达式如式(5)[15]所示:

(5)
(4)碳排放量。为了简化碳排放的计算,能量可分为拆卸能耗E1、工作站待机能耗E2、换向能耗E3和传送带能耗E4。能量消耗如式(6)所示:

(6)
(7)
式中,PW1、PW2、PW3、PW4分别为工作站负载功率、待机功率、换向功率和传送带功率。式(7)为碳排放计算公式,EFelc为电网碳排放系数,详见表1[16-17]。在实际计算中,按g/kWh计算。

表1 电网碳排放系数
基于上述目标量,本文的多目标UDLBP模型及约束条件如下:
minf=min[W,f1,f2,f3]
(8)
约束:
P1∪…∪PW=N,Pi∩Pj=∅(i≠j)
(9)
(10)
STi≤CT
(11)
式(9)保证每个零件只能被分配到一个工作站中;式(10)限制了理论最大和最小工作站数量;式(11)确保了每个工作站的容量。
2 解的编码及优化算法
Passino提出了著名的细菌觅食算法,其中主要包含趋化、繁殖和迁移三种算子用以寻优[18]。本文将BFO算法应用于UDLBP,提出了一种改进多目标细菌觅食算法(improved multi-objective bacteria foraging optimization, IMOBFO),在趋化方面,结合了自适应动态搜索方法;在繁殖环节,混合了遗传算法的交叉算子,防止过快收敛。
2.1 解的编码与解码
如图2b所示,结合U型拆卸线的布局特点,零件可在工作站的入口侧或出口侧拆去。本文采用正数和负数混合编码的形式:入口侧和出口侧拆去的零件分别用正整数和负整数编码。首先得到直线型拆卸线的拆卸序列Xpre,步骤为:结合产品优先关系图,找出所有无前驱的结点,随机取一个放入Xpre,并更新图;循环n次,使所有零件均被分配;再进行随机任务分配,得到U型线拆卸序列X。以图1产品的一个可行直线拆卸序列Xpre=[1,3,2,4,5,6,7]为例,随机选取序列Xpre的前端或后端元素,如选择前端元素1,放入X的第1个位置;若选取后端7号零件,将其放入X的2号位置。以此类推,最后得到一随机分配的U型拆卸序列X=[1,-7,3,2,-6,4,5]。
对于拆卸序列X=[1,-7,3,2,-6,4,5],先在工作站1的入口侧拆去零件1。由式(2),计算包含零件7的工作站1的作业总时间ST1。若ST1小于CT,则零件7会在工作站1的出口侧拆除,反之,则在工作站2中的出口侧拆除。以此类推,直至解码完毕。
2.2 多目标优化与评价
对于可行解X,其多目标优化的目标向量及约束如式(12)所示:

(12)
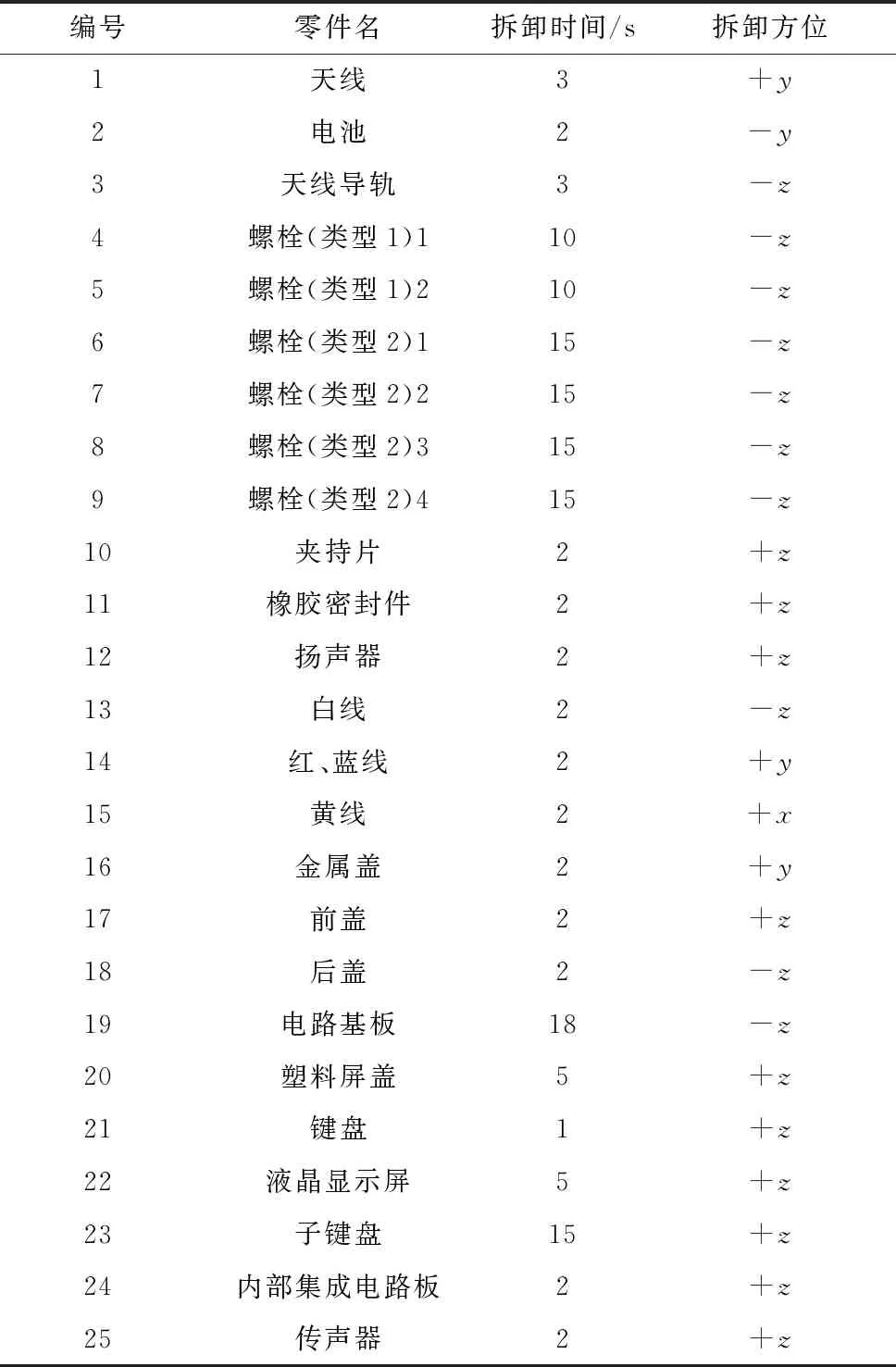
其中,u为优化目标数,q是不等式约束总数,r是等式约束总数,S是可行域。给定两个可行解X1和X2,若满足式(13),则X1支配X2,记作X1 (13) Deb K等[12]利用Pareto思想,对解进行分层,并引入了“拥挤度”指标(见式(14))。若同层的X1支配X2,满足式(15)或式(16)即可。 (14) pg(X1) (15) (16) 上述的这些方法只能比较个体之间的支配关系,却无法比较不同Pareto最优前沿之间的优劣。超体积指标(hypervolume indicator, HI)[19]是目前使用较多的一种Pareto前沿质量评价指标。其表达式见式(17)。 (17) fj(R0)>fj(Xi),∀j∈{1,...,u},∀Xi∈PN (18) 其中,PN是Pareto非支配解集,R0是在解空间中的参考点,其选取需满足约束条件式(18)。Leb指勒贝格测度(Lebesgue Measure),[f1(Xi),f1(R0)]×…×[fu(Xi),fu(R0)]是参考点R0和非支配解Xi所围成的超立方体。由HI定义可知,参考点须保持一致,否则结果不具有可比性。 由于生理和心理的影响,男性更多理性,而女性则有感性的倾向,女性为了爱情而牺牲自我的倾向也很高。对于爱情,男性认为是社会性的欲望。另一方面,对女性来说爱情被认为是自然的追求。也就是说,爱情对男性来说只是在生活中增添色彩的作用,不是全部的生活。所以,男性的爱通常会影响到其他的——地位、身份等,是不纯粹的。在选择选择的时候,男性会抛弃其他的欲望,选择自己的前途。爱对男性来说只有调味料一样。 在本文中,每个可行序列X对应细菌在生态环境中的一个位置。用多目标函数的值表示这个解的质量,即营养的丰富度。一个大肠杆菌的觅食过程主要包含旋转和游动行为。细菌先沿某一方向游动,若该方向的营养更为富集,细菌大概率沿此方向继续游动;反之,则可能会旋转游动方向。Kalayci C B等[6]针对DLBP的序列寻优问题,提出了几种寻优算子如:交换、插入、左重构、右重构等。以2.1节所示序列X为例,它们的寻优机制如图3所示。 (a) 交换 (b) 插入 每一次的游动都可以视为一次寻优过程,选用的寻优算子可视为游动的方向,由此使用了一种动态自适应的方向选择机制,如图4所示。 图4 动态自适应趋化 趋化之后,适应性较差位置的细菌会被淘汰。引入2.2节的多目标评价机制,对个体进行排序,剔除种群中的后半群体。为了增强种群的多样性,引入遗传算法的交叉算子。保留排名在前50%的个体,随机复制产生一个新个体,或与另一个体通过PPX交叉[4]的方法产生新个体,以维持种群个体总数不变。 由于细菌生存环境的变化,种群中部分个体死亡。这种现象在BFO算法中被称为迁移算子,它可以增强种群的多样性。给定一个概率Pm,每个个体生成一个在(0,1)之间的随机数rand(1)。若rand(1) 生成指定个数的细菌群落之后,细菌通过趋化、繁殖、迁移迭代更新,直至满足终止条件。具体流程见图5。其中,Ned、Nre和Nc分别为最大迁移次数、最大繁殖次数、最大趋化次数。 图5 算法流程3 实例分析 本文以文献[7]的手机产品为例,其各个零件名称及相关参数见表2。图6是其零件的优先关系图。设定节拍时间CT=30 s,Matlab开发测试程序。参数设定如下:种群规模Pop_size=50,Nc=20,Nre=5,Ned=5,方位基本变换时间dt=2 s,游动次数限制tmax=100,Pm=5%,HI参考点R0=(10,40,4,440),碳排放系数EFelc=811.2 g/kWh。拆卸过程中的各种能耗明细见表3。为了验证算法的性能,本文选择了一些算法进行比较。NSGA-II是一种代表性的多目标优化算法。Kalayci C B等[7]将ABC应用到了DLBP领域,并对此手机实例进行了研究。胡杨等[20]最先将BFO应用于DLBP。由此,本文选择NSGA-II、ABC和MBFO算法作为对比。 表2 手机零件明细 图6 手机零件约束关系图 表3 功耗明细 图7 Hypervolume指标 图8 箱线图 表4 4种方法的Pareto前沿 表5 IMOBFO的平衡方案 表5是由IMOBFO优化得到的Pareto前沿。结合表4,IMOBFO的所有解均只占用7个工作站,6种目标向量,总共有10种拆卸规划方案。其中解2、4分别有3种和4种拆卸规划方案。ABC和MBFO至少占用8个工作站,NSGA-II的解虽然只占用7个工作站,但综合质量不如IMOBFO。通过均值也可以发现,各目标函数均有显著提升,表明IMOBFO的优化能力优于ABC、NSGA-II和MBFO。 在Pareto前沿中,方案的选择取决于决策者的主观需求。只需要空闲时间最少,在IMOBFO的优化方案内,可以选择表4中解1对应的方案;只需平滑度或碳排放量最小,可以选择解6对应的方案。使用Pareto关系进行优化可以回避多目标优化时目标之间相互约束的问题,为决策者提供多种综合的选择方案。 为了提升拆卸效率、降低碳排放,本文以最小工作站数、空闲时间、平滑指数和碳排放量等指标,基于改进多目标细菌觅食算法,提出了一种U型拆卸线平衡优化模型。结合某款手机实例,与其他几种算法进行了对比。结果表明,IMOBFO算法的Pareto前沿的优化方案种类较多。从HI值的分布和最优前沿的均值等可见,优化效果较为稳定,解质量较优,充分体现出本文提出的模型的可行性、有效性,可以为面向低碳高效的产品的拆卸线规划提供一定的指导。


2.3 趋化算子


2.4 繁殖算子
2.5 迁移算子
2.6 算法结构

3 实例分析






4 结论
