基于BDS短报文服务的海流机-岸基通信
2021-03-26王永鼎陈小锋
王永鼎,陈小锋
(上海海洋大学工程学院,上海 201306)
0 引言
2020年7月31日上午,北斗三号全球卫星导航系统(BDS-3)正式开通[1].近几年,北斗卫星导航系统(BDS)正在逐步进入国民生产生活的各个部分,许多通讯公司已成功研制兼容BDS的导航芯片,并向各行业推广.BDS未来也将在我国的海洋渔业、海洋工程装备、远洋通信等领域广泛应用,服务于我国的现代化建设和国民的日常生活.
无论是在近浅海或是深远海域,由于海洋面积广阔,海洋环境复杂多变,波浪起伏的海面上无法像陆地一样定点安装通信基站或者供电基站,海上设备的能源供应(如电力供应)和信息传输(如与岸基数据传输和通信)一直制约着海上设备的阵列化和大型化发展.海洋能发电装置尤其如此.海流机在实现离岸化的过程中,与岸基的通信和数据传输等问题一直以来是困扰海洋能开发的棘手问题之一.海流机的工作状态、故障信息检测、海上精确定位、数据传输、远程控制等问题是近几年海洋设备研发的热点问题之一.将BDS短报文通信应用到新型海流机中,是探索解决海流机离岸化过程中通信问题的有效途径.
1 海流机工况分析
潮流能是离海岸线距离最近的一种海流能形式[2].2000年杭州湾跨海大桥桥址潮流调查时发现,多处潮流流速达4~5m/s,最大可达5m/s以上,可见我国绵长的海岸线蕴含丰富的海流能,开发应用前景广阔.据有关资料记载,在我国东南沿海地区,海洋表面水流速度约2.1m/s,平均流速约1.7m/s.海流机实际工作在水深1.2~3.0m,来流水速在1.58~1.99 m/s之间,平均速度约为1.8m/s[3].以半径R为3.15m、设计功率为100 kW的水平轴海流机为例,表1是该机型常见的三种工况.

表1 三种常见工况
其中P表示在该工况下的叶片表面载荷.水平轴海流机通常系留在近海的海底,运行工况比较复杂多变,叶片和传动系统等设备的日常检修和维护,故障检测等比较困难,因此传感器和检测装备与岸基的通信和数据传输显得尤为重要.
2 海流机的定位和短报文通信
BDS-3包括有源和无源双模体制,具有定位、测速、授时和短报文通信等功能.BDS由空间的北斗卫星、主控站和若干地面站、用户端的卫星导航系统芯片三部分组成[4].
2.1 海流机实时定位
在研制海流机的过程中,经常需要进行小型样机的海试实验,由于海况的不确定性,试验样机的丢失时有发生,造成一定的经济损失,样机的实时定位意义重大.BDS具有两种工作模式,卫星无线电导航业务(RNSS)模式只能进行定位,但可实现每秒定位.卫星无线电测定业务(RDSS)模式可同时进行定位和双向短报文通信,频率为1次/m in.因此BDS-RNSS可以对海流机实现高精度的实时定位.假设海流机坐标(X0,Y0,Z0),定位卫星坐标为(Xi,Yi,Zi),i=1,2,3,4,据此可得如下公式:
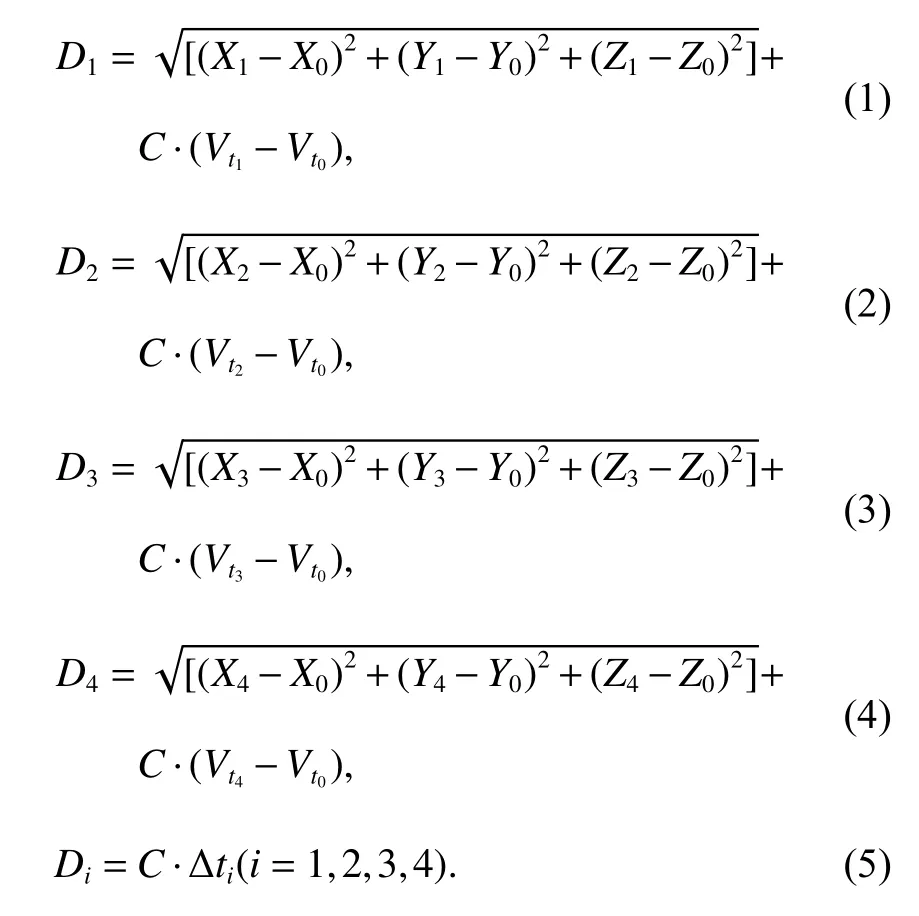
式中:C为卫星信号的速度,Di为卫星i与海流机的直线距离,∆ti卫星信号从卫星到达海流机的时间,Vti和Vt0分别为卫星和海流机的时钟差[5].
2.2 海流机与岸基短报文通信
海流机在实际工作过程中需要采集的数据有很多,例如叶片表面载荷、叶轮转速、传动系统状态、发电机实际功率、电流电压大小、海流温度、流速等.海流机的故障检测、与控制总站的远距离通信和数据传输都需要一种高效的通信方案,在此选用短报文通信解决这些问题.
BDS-RDSS的短报文传输带宽由用户卡决定,每张用户卡有两个参数,传输容量和传输频率.其中单个用户卡的传输容量为7~120汉字/次,即报文最大长度为120 B/条,传输的频率为1次/min或者2~3次/min,这取决于ID卡级别.若按照单向1次/m in数据传输计算,每条短信报文容量约100 B,单张用户卡可以传输的数据量为6 KB/h,60KB/10 h,144KB/d[6].
3 数据位拼接-LZW两重数据压缩
BDS-RDSS相比于其他几个卫星通信系统功能已非常先进,但单次允许的传送数据量小,单次传输不超过78 B的二进制数据[7].其次,相邻两次通信至少间隔1m in.如果数据量过大,一个完整数据包完成传输将经过较长时间.海流机未来的阵列化和大型化发展所产生的海量数据,很难在有限时间内完成传输.目前BDS通信是根据用户传输的数据量收费的,卫星通信的费用会随着设备工作时间的增长而递增,这必然导致海洋能发电成本大幅增加,影响海洋能的开发利用和商业化发展进程[8-10].基于上述情况,需考虑将数据压缩应用到BDS短报文通信中.
位拼接是指在位的层面将数据拼接,节省数据间的位空间浪费[7].海流机的参数量都有固定类型,而且都在一定范围内,比如流速在0~10m/s,叶轮转速在1.5~6 rad/s之间.故可根据上述物理量的实际范围,来确定最小的数据表达位数.
在数据采集端,只需将各类物理量对应的最小位数的二进制数在位的层面拼接起来,再断截为字节;在数据接收端,用位拼接算法反解出各物理量,再加上偏移量便得到所需数据值.位拼接具有显著的节省位空间的优点.海流机的20多种数据需要155 B,位拼接压缩后只需55 B,有效节省了100 B的空间,压缩率约为28%.
LZW无损压缩是1984年TA Welch对LZ编码中的LZ78算法修改而成的一种字典压缩算法,是对LZ78算法的改进[7].LZW算法(串表压缩算法)的高效在于字典是在编解码过程中动态形成且不必将字典传给解码器.LZW算法基本思想是根据待压缩的字符流,动态生成一个字典,将输入字符串映射成定长的码字输出,具体流程如图1和图2所示.
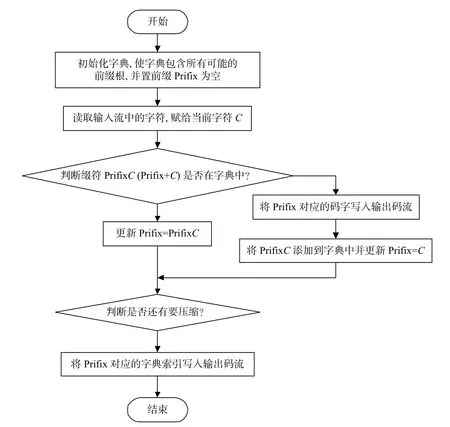
图1 LZW压缩算法
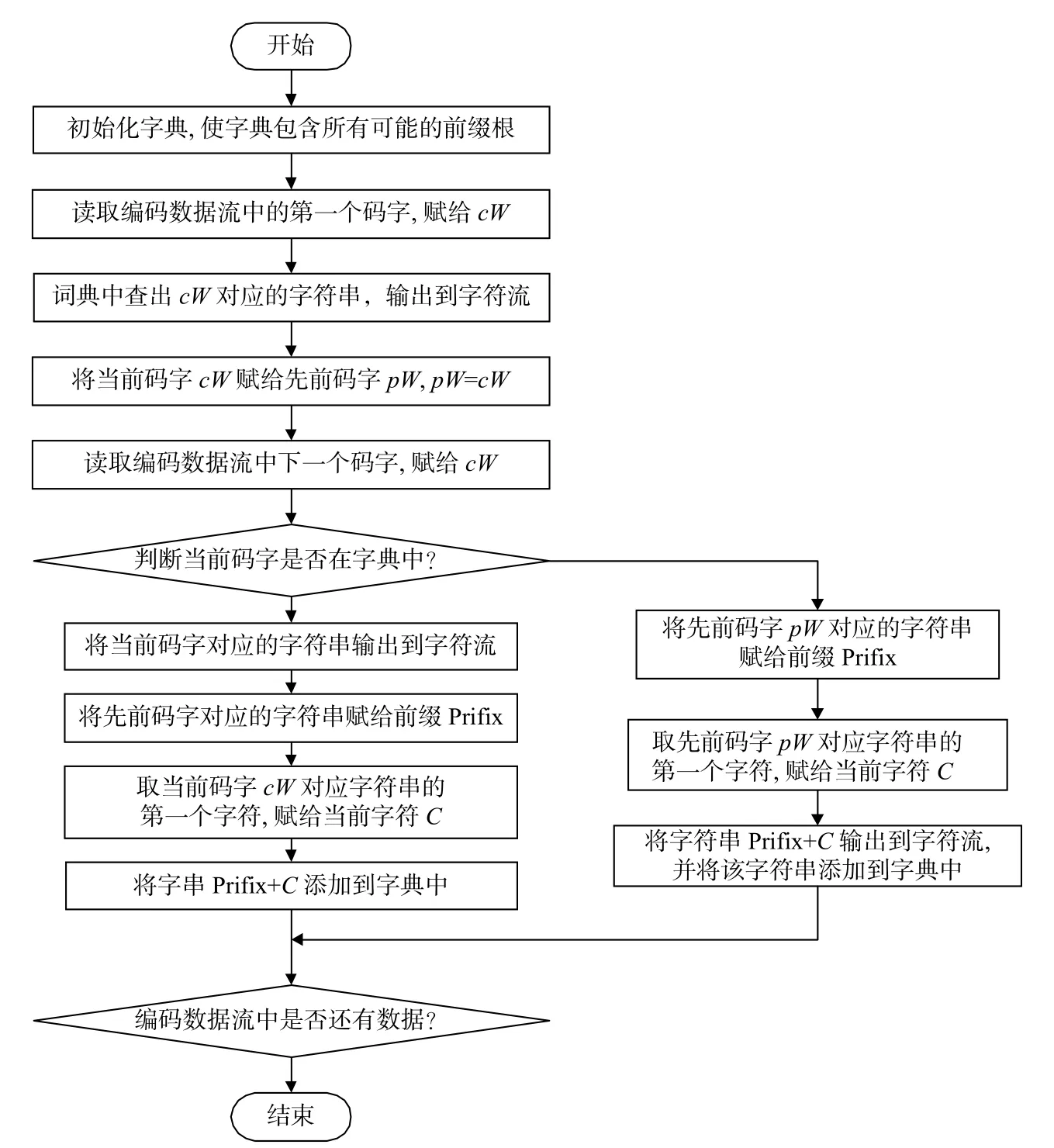
图2 LZW解压缩
4 海流机主控制系统结构设计
基于BDS的海流机主控制系统由泰斗微电子设计研发的TD3201型BDS-RDSS通信模块和BDS-RDSS天线、STM 32F103VBT6型单片机、W 25Q128FVSIG型Flash芯片、数据采集器和电源等构成[4].数据采集模块用于采集通信协议中所列数据,采集数据经过加密和压缩后,通过RS485串口总线进入STM 32F103VBT6单片机中,由BDS通信终端通过卫星发送给地面.BDS地面控制中心接收数据,通过RS485总线将数据发送给数据库,主机对数据库中的海量数据进行处理,并将结果发送给客户端.STM 32F103VBT6型单片机具有数据延时收发、时钟信号控制、BDS通信控制等功能,同时具有2MB的Flash存储容量和128 KB的RAM存储容量,数据处理较快,满足系统要求.图3是海流机主控制系统结构图,包括闪存、单片机、电源降压等模块.一体机通过串口与外部设备进行数据交互.RS485接口电路采用差分电平进行数据传输,具有较强的抑制共模干扰能力,适合数据的远距离传输,最大传输距离可达3 000m[4].

图3 主控制系统结构图
工作原理:数据采集模块通电后,主控制系统先对数据采集终端的各类传感器、BDS-RDSS等模块进行初始化,然后对卫星信号进行循环检测,当检测到BDS信号后,以10 s/次的频率读取所有传感器的数据缓存,当BDS模块1m in发送间隔时间到达后,把6次缓存的海流机数据通过BDS模块发送到岸基数据中心.当个别数据采集周期比较长时(比如10m in/次),系统会在数据采集完后,让BDS功耗较大的模块处于休眠模式,在下次采集周期开始时自动唤醒,以节约功耗,保护设备.
5 海流机-岸基通信协议和方案
BDS通信网络的传输单元是BDS通信协议下的短报文.BDS短报文的数据类型采用ASCII码和BCD码结合的方式,ASCII码用于表示汉字,BCD码用于表示阿拉伯数字.海流机和岸基通信协议[9-13]和通信原理图如表2所示.
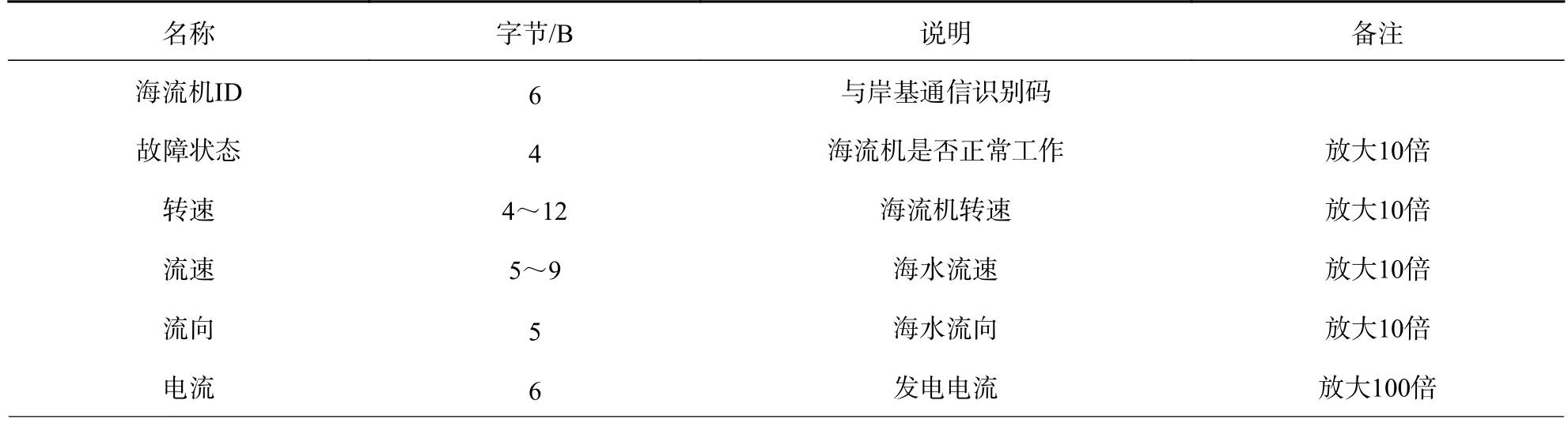
表2 海流机-岸基通信协议

表2 (续)
根据王世明等[10]设计的海上设备与岸基的通信方案,本着节约经费,提高设备利用率的原则,在其通信方案的基础上进一步细化.初步拟定如图4所示的通信方案,方案的具体实施因设备的差异而有所不同.
海流机上的各类传感器和故障监测系统等采集的数据,利用BDS海上用户机的收发功能,经过BDS中继后传输给岸基控制站.地面控制站将海量数据存入大型数据库或者云端存储,然后再将数据存入上海海洋大学本地数据库,利用主机进行解码和数据处理,将结果发送到PC端.通过以上路线,用户可以对海流机的状态进行实时监测和发出指令,并通过数据分析了解实时发电状况和海况信息.整体方案的各模块的组成如图5所示.
数据采集包括海水温度、海水流速、装置振动、故障检测、数据传输、发电情况等信息.主控中心根据海况对海流机控制系统发出指令,及时调整桨叶攻角,避免海流机因恶劣海况导致转速波动大、发电不稳定、设备发生共振等不良现象.终端对数据库的访问通过Java语言开发的VS2010软件平台实现,如图6所示.
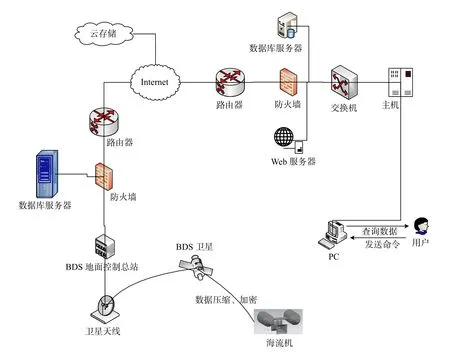
图4 海流机-用户通信示意图

图5 各模块组成图
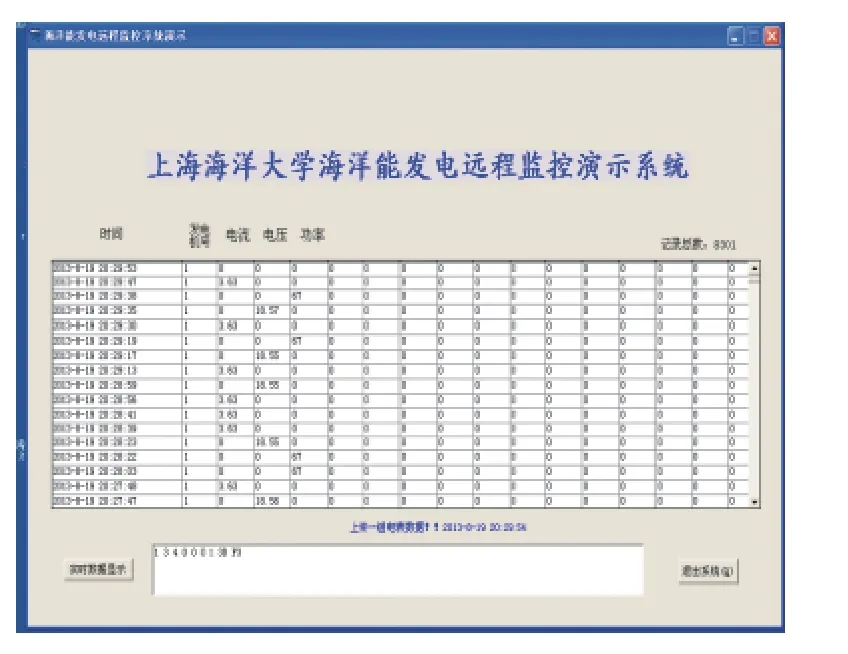
图6 用户机界面
6 结束语
BDS通信的短报文和有源-无源双模定位功能可在未来几年为海洋装备的海上作业提供高效精确的通信和导航定位服务,进一步推动我国海洋能的开发进程.通过BDS-RNSS实现高效实时定位,BDS-RDSS短报文通信有效解决海流机与岸基之间的远距离通信和数据传输问题.将位拼接-LZW两重数据压缩应用到数据采集终端,可保证数据的高效,快速传输.拟定海流机主控制系统的硬件设计方案并进行初步验证.结果表明,总体通信过程合理,可以实现海流机至岸基用户的有效通信.下一步待解决的问题是如何在降低成本的前提下,进一步实现海上装备和岸基之间高效、安全、快速的远距离通信.