轨道车辆主动悬挂系统及试验方法研究
2021-03-24窦晓亮李传迎张宝安
窦晓亮 李传迎 张宝安
摘 要:介绍了轨道车辆主动悬挂系统的分类、基本控制策略以及现车应用。阐述了悬挂系统半实物试验验证方案及系统组成。
关键词:悬挂部件;半实物;振动试验;轨道车辆;控制策略;舒适度
中图分类号:TB 文献标识码:A doi:10.19311/j.cnki.1672-3198.2021.11.079
0 引言
随着轨道车辆技术的不断发展,对车辆动力学性能及运行舒适性的要求越来越高,主动减振控制技术已成为改善乘坐舒适性的重要技术途径。早在上世纪90年代,主动悬挂部件已在日本新干线500系、700系、德国摆式电动车组ICT等列车上得以成功应用,我国的和谐号CRH2B、CRH380、CRH380AL等动车组车辆也安装了半主动悬挂系统,取得了理想的效果。
主动减振系统是一个涉及车辆动力学、液压伺服、测试控制、机械以及故障诊断等多学科研究课题,为了保证悬挂部件的稳定性、可靠性,需要对其进行充分的试验验证。由于悬挂部件试验资源欠缺,考核周期长,传统的线路试验不能满足测试研发需求。采用半实物试验方法验证主动控制元件是目前国内外常用的解决方案,半实物试验能集中焦点针对悬挂部件动态性能及控制策略进行研究,实现在产品设计阶段的同步试验验证,大大提高了产品研发效率,为设计人员确认设计符合性,预估车辆性能提供了基础保障。
1 悬挂系统的分类
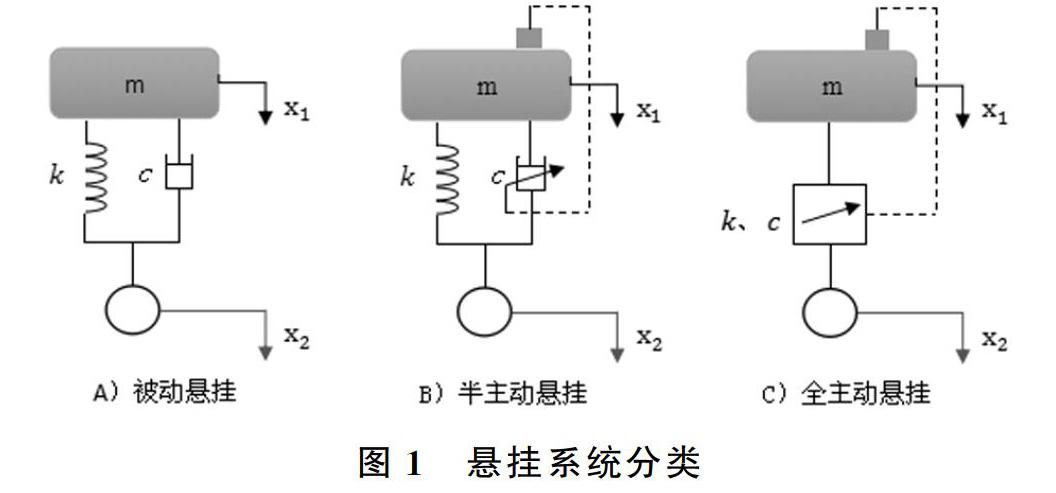
从振动控制的角度来说,悬挂系统可以分为主动悬挂与被动悬挂,如图1所示。传统的被动悬挂部件主要由弹性元件和阻尼元件构成,系统工作时不需要外界能源,只是耗散或暂时储存能量。由于被动悬挂往往采用参数优化的设计方法,以求尽量兼顾各种性能要求,但是由于最终设计的悬挂参数是不可调节的,所以在使用中很难满足较高的性能要求。
主动悬挂按照其是否需要外接能量输入,又可分为有源主动悬挂(全主动悬挂)和半主动悬掛。全主动悬挂通常由动力源(液压泵或空压机等)、产生力或扭矩的主作动器(伺服电机或电磁铁等)、测试和反馈控制系统等部分组成。当列车运行速度、载荷、路面状况等条件发生变化时,主动悬挂系统能自动调节悬挂刚度、阻尼,从而满足车辆动力学各项性能指标要求。
半主动悬挂由可变特性的弹簧元件和阻尼元件组成,由于它没有一个动力源为悬挂系统提供持续的能量输入,所以半主动悬挂系统改变刚度特性要比改变阻尼状态困难得多,因此可变阻尼悬挂系统是最为常用的半主动悬挂系统。
2 主动悬挂系统的工作原理及控制策略
2.1 主动悬挂系统的工作原理
轨道车辆主动悬挂系统通常由执行机构、测试系统、控制系统以及能源系统四部分组成,执行机构通常为液压缸、气缸等部件;测试系统负责监测车辆系统状态,为控制系统提供依据,如各类加速度、角度传感器;控制系统进行数据处理,并根据预设的控制策略求解控制指令,并发送给执行机构。全主动悬挂系统还配备能源系统,可以更好地调节悬挂部件的刚度和阻尼特性。
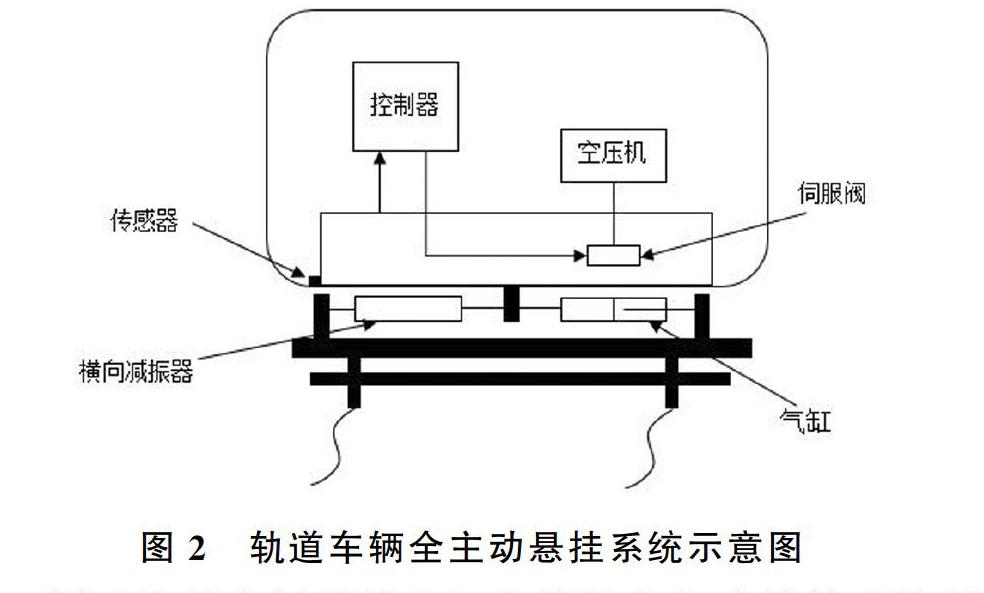
图2为日本新干线E2系列车全主动悬挂系统示意图,在传统横向减振器位置安装一个空气作动器,控制器接收车体上加速度传感器测试信号,根据控制算法解算控制指令,控制空气伺服阀开闭,使空气作动器与传统被动横向减振器共同控制作用,达到抑制车体振动的效果。
与全主动悬挂系统不同,半主动悬挂不需要提供额外的动力源,目前其实际应用仅限于对于悬挂系统阻尼参数的控制,即改变悬挂系统的阻尼力,主要通过改变节流面积和改变流体粘度等方法实现。
2.2 主动悬挂系统的控制策略
通过对文献的调研,目前轨道车辆主动悬挂系统普遍采用的控制策略主要有天棚(skyhook)阻尼控制、最优控制(线性二次型调节器控制LQR、线性二次高斯控制LQG和HSymboleB@最优控制)、非线性自适应控制等。
天棚阻尼控制通过配置在例如车体、构架的加速度传感器实时获取加速度信号,通过信号处理、计算判断构架运动状态,当车身速度与构架动速度同向时施加适当的阻尼,异向时施加小阻尼,经控制器判断后向执行器发送信号,执行器作动,实现阻尼力的调节。天棚阻尼控制算法因其结构简单、计算工作量少、参数方便易调等特点,已成为半主动悬挂中最常用的控制策略。
LQG是基于最优控制理论的一种状态反馈控制器。已知连续时间变受控系统(t),给定二次型评价函数J,寻找悬挂系统最优反馈控制指标,使得评价函数J最小。LQG的基本要求为所有状态量可测,因此其不适用于涉及模型摄动的技术问题。HSymboleB@
控制理论的提出能够有效地解决此项难题,当系统参数存在一定范围内的摄动时,即系统传递函数非固定值,系统可用一组传递函数来描述,通过控制器K,使外输入W到被控对象输入Z的传递函数矩阵的H无穷范数最小,即抑制噪声到期望输出之间的传递函数集的最大增益。由于该理论是基于频域的控制理论,因此,可针对车体不同的振动模态(例如摇头、横移和侧滚)分别进行加权计算。
3 主动悬挂系统的应用
自上世纪90年代起,为了提高车辆乘坐舒适度,主动悬挂装置在轨道车辆领域有了广泛的应用。本节围绕轨道车辆主动悬挂控制技术,并结合资料文献调研,介绍了主动悬挂装置的应用。
3.1 横向振动控制
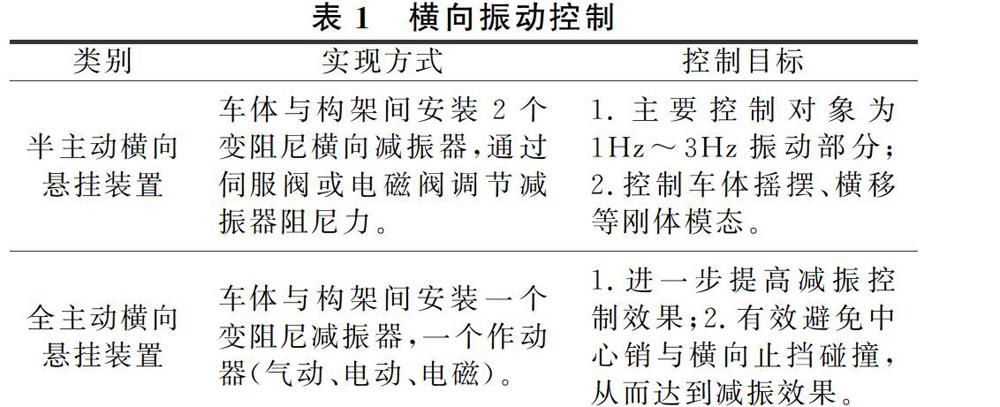
早些年的研究认为,轨道车辆低频横向振动带来的舒适度问题比垂向振动舒适度问题更为突出,因此横向半主动横向减振装置首先被应开发并用于日本新干线500系动车组,试验数据表明,该悬挂系统对于车体横向低频振动起到了有效的抑制作用,车辆运行平稳性及舒适性改善明显。为了获得更好的减振效果,日本新干线部分车辆又装备了全主动减振器,例如日本观光列车采用中央横向电磁作用器,使车体加速度大幅度降低,进一步提升了乘坐舒适度。表1为轨道车辆横向振动控制常用的实现方式及控制目标。
類别实现方式控制目标
半主动横向悬挂装置车体与构架间安装2个变阻尼横向减振器,通过伺服阀或电磁阀调节减振器阻尼力。1.主要控制对象为1Hz~3Hz振动部分;2.控制车体摇摆、横移等刚体模态。
全主动横向悬挂装置车体与构架间安装一个变阻尼减振器,一个作动器(气动、电动、电磁)。1.进一步提高减振控制效果;2.有效避免中心销与横向止挡碰撞,从而达到减振效果。
3.2 垂向振动控制
垂向振动控制大多基于半空主动悬挂系统,主要通过在轴箱与转向架构架或者构架与车体之间并联安装垂向可变阻尼减振器来实现。垂向振动控制目标主要为控制车体的刚体模态振动(浮沉、点头、侧滚),以及抑制车体由“一阶垂弯模态”引起的弹性振动。
3.3 车体倾斜控制
为了避免车辆高速通过曲线时,由于离心力作用使舒适度恶化,可以通过主动控制车体倾斜,补偿超高不足,在保证舒适度的情况下,提高车辆过曲线速度。常用的车体倾斜控制装置主要有油缸式和空气弹簧式两种,即通过气压或油压实现车体的抬升。
4 主动悬挂系统的试验验证方法
与传统被动悬挂部件不同,主动悬挂系统需要根据车辆实际运行状态进行实时反馈,由于悬挂部件及其控制算法开发验证周期长,传统的线路试验不能满足研发需求。借助硬件在环技术的半实物试验方法能够有效的解决上述问题。其原理是将结构整体划分为数值子结构和试验子结构,对需要反复测试优化的主动悬挂部件进行物理试验,对车辆其他部分进行数值仿真,将仿真计算的结果输出作为物理试验的条件输入,将物理试验的状态反馈作为仿真计算的初始条件,形成半实物试验闭环。
图3为主动悬挂系统半实物试验系统原理图,其中主动减振器和加载作动器同轴对顶安装,加载作动器对悬挂部件进行加载。加载作动器采用位移控制,加载过程中的力和位移信号实时反馈至作动器控制器,作动器控制器将力反馈信号通过模拟量传输至实时仿真系统,实时仿真系统通过车辆仿真模型计算,向作动器控制器输出位移指令。作动器控制器比较位移指令和位移反馈,将偏差信号转化为伺服阀驱动信号,驱动伺服阀动作,控制加载作动器按指令位移运动,实现位移闭环控制。实时仿真系统将计算车体、构架加速度传输至悬挂部件控制器,控制器通过特定算法,向悬挂部件输出阻尼力指令,控制悬挂部件阻尼力的大小和方向,图4减振器试验测试现场图。
5 结束语
主动悬挂系统在轨道车辆领域已有二十多年成功应用经验,大量的实践数据表明,主动悬挂系统能够有效降低车体低频振动,提高车辆舒适性。然而,其在结构、能耗、作动精度、控制策略、安全稳定性等方面仍有很大的优化空间,半实物试验技术为快速便捷地实现悬挂部件优化验证提供系统解决方案。
参考文献
[1]则直久.500系列动车的半主动悬挂系统[J].国外内燃机车,1998,(5):8-12.
[2]菅原能生.日本振动控制技术的最新开发动向[J].国外铁道车辆,2010,(9):6-9.
[3]刘宏友,曾京,李莉,等.国内外半主动悬挂系统的研发及应用综述[J].国外铁道车辆,2012,(11):12-17.
[4]MASAYUKI MIYAMOTO.日本高速列车先进技术的近期研究与发展(续完)[J].国外铁道车辆,2004,(5):5-13.
[5]菅原能生.垂向半主动悬挂装置性能试验[J].国外铁道车辆,2002:32-36.
[6]Stefano Bruni.Research of Active Yaw Damper System-Control System[R].2018-09-13.
