基于证据理论的无人机光电侦察设备故障诊断*
2021-03-24沈延安张君彪
沈延安,张君彪
(1.陆军炮兵防空兵学院,合肥 230000;2.空军预警学院,武汉 430000)
0 引言
无人机光电侦察设备是无人机系统最重要的任务载荷,能够搜索、侦察、识别、定位、跟踪地面目标,为指战员迅速准确掌握敌情、制定方案、克敌制胜提供前提条件。但由于光电侦察设备稳定框架结构复杂,设备控制电路精密,故障分析也异常繁琐。
目前,针对无人机光电侦察设备故障诊断的研究较少,且大多是单纯采用历史故障统计数据或依靠专家知识进行评判,获取的诊断结果适用性不强,效率较低。由于无人机光电侦察设备组件集成度高,结构密闭性强,故障信号可测试性差,导致基于信号处理的传统诊断方法难以满足诊断要求。考虑到D-S 证据理论(Dempster-Shafer Evidence Theory,DST)能有效融合信息,减少冲突信息对结果造成的影响,并产生相对客观的判断结论[1-3]。因此,本文研究了基于DST 的无人机光电侦察设备故障诊断方法,为解决诊断的不确定性提供了一条新途径。
1 证据理论
证据理论是Shafer 在Dempster 所提出的理论基础上,进一步发展完善的一种不确定推理理论,是概率论的进一步推广,故也称D-S 证据理论[4]。证据理论以证据(数据或专家知识)为基础,对不确定性问题的描述更贴近人们思维习惯[5]。
1.1 基本概率分配
1.2 信度函数与似然函数



图1 命题的不确定性
1.3 合成规则
设Bel1和Bel2是同一识别框架上的两个信度函数,m1和m2分别是其对应的两个基本概率分配,焦元分别为和,设

称为两个信度函数合成的Dempster 规则。
2 基于证据理论的无人机光电侦察设备故障诊断模型
2.1 基本概率分配函数的获取
无人机光电侦察设备基本组成包括:可见稳定框架装置、光电视摄像机、前视红外仪和图像跟踪控制器、伺服控制模块等。前视红外仪和可见光电视摄像机及其伺服控制电路全部安装在球形稳定框架内部的内框架上构成双光轴稳定转台,通过升降机构吊挂于无人机机腹内。图像跟踪控制器、伺服控制电路、二次电源等组成电子控制系统。伺服控制电路包括伺服模块、功放模块、陀螺驱动模块和通讯模块等,是故障诊断的重点难点。无人机光电侦察设备系统基本结构组成如图2 所示。
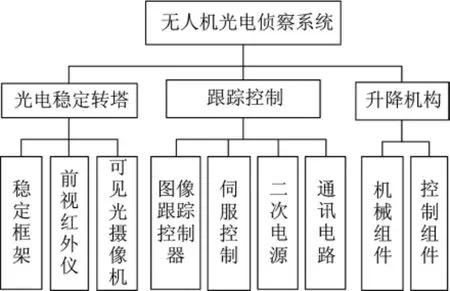
图2 光电侦察设备组成
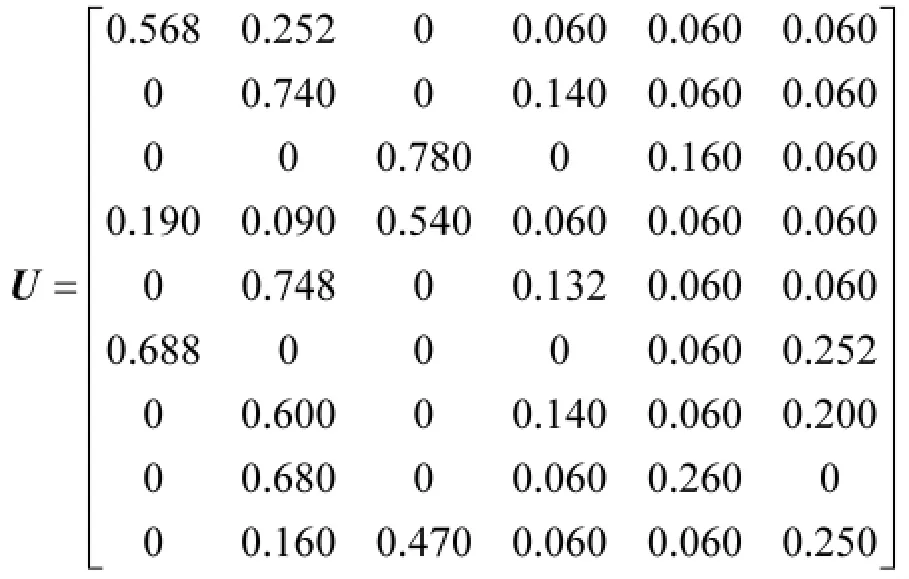
在对光电侦察设备平台进行故障诊断时,首先要确定故障原因集Y,然后根据观察记录情况和信号检测结果确定故障征兆集X。为避免较大的主观性,依据统计数据得到统计矩阵V,通过专家评判得到专家经验矩阵S,分别进行归一化处理后进行加权来获取基本概率分配结果U。

2.2 证据权重系数的确定
DST 认为每个证据源在进行证据合成时重要程度是相同的,但在实际故障诊断过程中,各证据源对故障诊断结果的影响是存在差异的。因此,在融合证据前,需要计算各证据源的重要程度(即权重系数),并据此对证据源进行修正。本文采用Jousselme 距离[6]确定证据权重系数。
设mi、mj为证据Ei、Ej在识别框架上对应的基本概率分配,将每一个基本概率分配表示为其在空间中对应的向量n,则mi、mj间的Jousselme 距离为

Jousselme 距离的具体计算方法为


证据间的冲突程度可用相似度衡量,相似度为

通过计算证据间的冲突量,可以构建相似度矩阵

则可计算出证据Ei被支持的程度为

证据Ei被支持的程度与全部证据中最高被支持程度相比,得到证据Ei可信度为

根据证据可信度,可得证据Ei折扣系数为

2.3 证据合成规则的改进
由前文可得证据源修正系数αi,并对原始证据源进行修正如下:

由于Dempster 组合规则认为冲突信息是无效的,因此,在进行证据合成时抛弃了全部冲突信息,这样得到的合成结果很容易与实际不符。围绕如何处理冲突信息这一问题,国内外学者进行了广泛的探索[7-10]。这些探索研究实质上就是在寻找一种能科学合理地利用冲突信息为最终融合结果提供支持的有效方法。本文认为,冲突信息应该根据产生冲突的各焦元值大小在各焦元之间按比例分配,且分配的冲突与焦元值大小成正比。由此,本文改进了合成规则,并重新分配了冲突信息。改进后的合成规则如下:

式中,m(·)表示基本概率分配函数,A 为m 的一个焦元,γ(A)表示由焦元A 引起的冲突根据焦元值的大小在焦元A 上的分配。
2.4 基于证据理论的无人机光电侦察设备故障诊断流程
运用DST 进行无人机光电侦察设备故障诊断,具体流程如图3 所示。
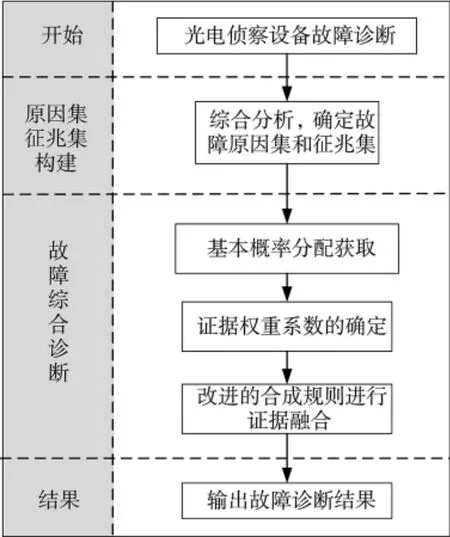
图3 无人机光电侦察设备故障诊断流程图
3 实例分析

以一种光电侦察设备控制电路部分的故障问题为例进行分析计算,该光电侦察设备控制电路集中于电子控制箱内,选定故障原因集为式中,y1为陀螺板故障,y2为伺服板故障,y3为图像跟踪板故障,y4为功放板故障,y5为母板故障,y6为二次电源故障。
根据观察记录和信号检测情况,确定故障征兆集为

式中,x1为惯性态异常,x2为锁定态异常,x3为图像显示异常,x4为跟踪态跟踪异常,x5为旋变角度异常,x6为陀螺信号异常,x7为电机控制信号异常,x8为控制信号指令异常,x9为系统启动异常。
依据部队调研使用单位所统计的平台控制电路故障,故障原因集与征兆集出现的频数如表1所示。

表1 控制电路故障征兆对应的故障原因频数统计
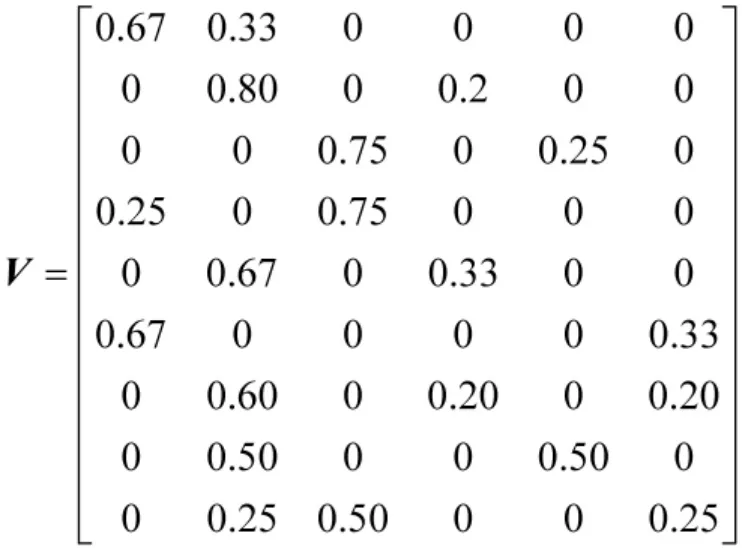

根据式(3),可得基本概率分配为
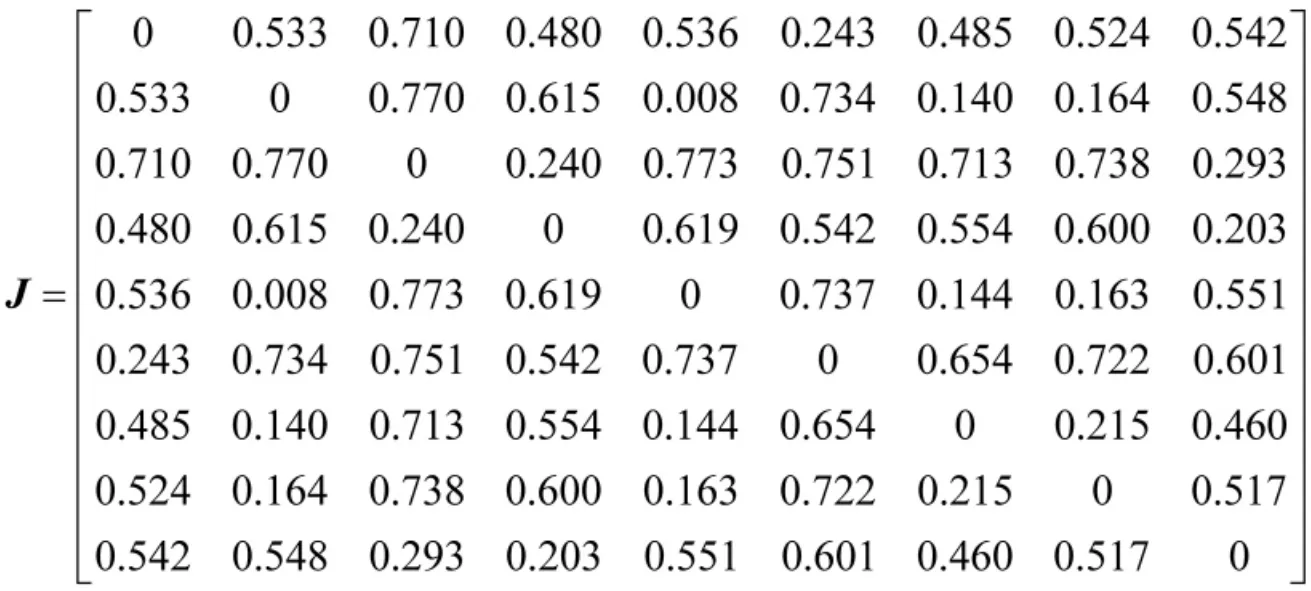
根据式(4)~式(6),计算证据之间的Jousselme距离矩阵为
在此基础上,根据式(7)~式(8),得到两两证据 之间的证据距离和相似度矩阵为

由此得到折扣系数α=(0.851 8,0.968 7,0.649 9,0.894 9,0.964 2,0.650 4,1,0.940 2,0.924 7)。再根据式(12)对证据源进行折扣修正,修正后的证据如下。
再由式(13)对修正后的证据进行融合,融合结果为(0.006 6,0.655 0,0.197 8,0.011 6,0.047 7,0.081 3,0)。即最有可能是伺服板或图像跟踪板故障。相同条件下,选用模糊综合评判法进行故障类型诊断,两种方法的对比结果如图4 所示。可以看出,基于DST 的无人机光电侦察设备故障诊断模型能通过对证据的重要性进行判断,从而给证据赋予不同权重,有效削弱了不确定性的影响,增强了结果的稳定性,提高了故障诊断的准确度。

图4 仿真结果对比
4 结论
本文针对无人机光电侦察设备故障类型多样性以及故障信息不确定性的特点,构建了一种基于DST 的无人机光电侦察设备故障诊断模型,最后以光电侦察设备控制电路部分的故障问题为例进行分析计算。实例验证结果表明,该模型能有效地减少不确定性对光电载荷故障诊断的影响,为解决无人机光电侦察设备故障类型诊断提供了一条新途径。