一种高超声速飞行器在线反馈滤波算法*
2021-03-24高长生王越欣荆武兴胡玉东
高长生,王越欣,荆武兴,胡玉东
(哈尔滨工业大学 航天学院 自主空间系统实验室,黑龙江 哈尔滨 150001)
0 引言
临近空间是指距离地面高度为20~100 km的空域,该空域处在航空和航天之间,比卫星飞行高度低,比飞机飞行高度高,探测信息相对空缺,掌握该空域对取得制空权有很大的作用,临近空间特殊的战略地位对未来战争体系的影响不可估量[1-3],近年来得到了各国军方的高度重视。以美国为代表,如HTV2,CAV等高超声速飞行器,其高速、远程、精确的特点可以实现全球战略打击目的,给其他国家的国防带来了严肃的考验[4-5]。在此背景下,针对该类飞行器的拦截研究已迫在眉睫。
在解决临近空间目标跟踪问题时,一个重要的方面就是构建高超声速飞行器的运动模型,经过近几十年各国科学家和学者的深入研究,其相关理论和模型日趋完善。相关的运动学模型主要有:匀速模型(CV),状态量只有位置和速度2方面,适合跟踪目标作简单的匀速直线运动,无任何机动情况下的运动形式[6]。匀加速模型(CA),相较于匀速模型,把目标的加速度加入到状态量中,适合跟踪目标作匀加速运动对应的跟踪模型[7]。圆周转弯模型(CT),指物体的速度和加速度大小均不变化,只有方向改变,主要用于跟踪目标转弯,常用于描述二维运动状态[8]。上述模型均是将加速度假设为高斯白噪声系统,这在实际应用中会出现很大的误差,此外一阶时间相关模型(Singer),将目标的加速度作为具有零均值指数衰减自相关函数的随机过程,且具有指数自相关的特性,弥补了这一假设误差[9]。在此基础上,国内的周宏仁教授对Singer模型进行了改进,认为下一时刻的加速度不能随意取值,只能在当前加速度的领域内取值,目标加速度的统计特性用修正的瑞利分布来表示。在目标运动过程中实现了加速度均值自适应变化,并且加速度概率分布与均值相关,方差则由加速度均值决定。目标的加速度只能在前一时刻加速度的邻域范围内变化,建模为非零均值的自相关指数衰减过程[10]。
在高超声速飞行器跟踪系统中,工程上应用最为广泛的是卡尔曼滤波。应用卡尔曼滤波算法完成系统状态估计,需要依赖构建的系统模型和实时的测量数据。然而,在跟踪未知临近空间目标时,飞行器的运动规律及参数无法得知,必然会引起跟踪模型的不匹配问题,同时目标运动过程中随时可能存在机动模式切换情况[11]。目标运动的不确定性严重影响了算法的精度和稳定性。目标机动运动实质上是一种非线性现象,可以利用神经网络的强非线性映射能力对目标运动的不确定性建模,对目标机动在线辨识,实时修正滤波估计值[12-14]。BP神经网络是一种按照误差逆向传播算法训练的多层前馈神经网络,是应用最广泛的神经网络,可以利用BP神经网络对滤波算法的滤波误差进行预测,并补偿给滤波估计值,从而提高滤波精度[15]。
综上所述,本文针对高超声速飞行器难以进行高精度跟踪这一问题,提出了一种高超声速飞行器在线反馈滤波算法。在当前统计模型的基础上,利用BP神经网络与卡尔曼滤波相结合进行滤波器设计,实现对高超声速飞行器高精度跟踪。最后采用数学仿真手段对所提出的算法进行了验证,并进行相关分析。
1 运动学跟踪模型与量测模型
1.1 运动学跟踪模型
目标跟踪模型是跟踪算法的基础,是系统的状态方程部分,即当前时刻目标的状态量由前一时刻状态量的表示方法,目标的运动特性由位置、速度、加速度等状态量表征。
(1)




(2)
假设红外采样间隔为T,对上述方程离散化,则离散时间状态方程为

(3)
式中:X(k)为k时刻目标运动的状态量;F(k)为状态转移矩阵;G(k)为输入控制矩阵;W(k)为噪声。
状态转移矩阵F(k)的表达式为
(4)
输入控制矩阵G(k)的表达式为
(5)
当前时刻的加速度均值一般情况下难以确定,用滤波递推过程中的加速度一步预测代替,有
(6)
目标当前加速度方差估计:
(7)
式中:amax和a-max分别为目标加速度的最大值和最小值。
噪声W(k)的协方差为
(8)
Q为对称矩阵,而且有
(9)
综上,“当前”统计模型将上一个时刻的加速度输入到当前时刻来估算加速度方差,进而自适应地调整过程噪声。
1.2 量测模型
首先定义探测坐标系OxPyPzP,简记为P。OyP轴在探测系原点水平面内,指向北极方向,OzP轴垂直于水平面指向上方,OxP构成右手坐标系,坐标系固连在地球表面。如图1所示。
设目标在探测系下的位置矢量:
r=(x,y,z).
(10)
红外探测器基点在探测系下的位置矢量:
Si=(xi,yi,zi).
(11)
目标在本体系下的矢量为
(12)
所以有
(13)
如图2所示。

图2 定位原理Fig.2 Positioning principle
定位:
(14)
整理为矩阵形式:

(15)
则有
(16)
综上,使用最小二乘算法定位,则有
M·X=Y⟹X=(MT·M)-1·MT·Y.
(17)
2 基于BP神经网络的滤波器设计
2.1 BP神经网络
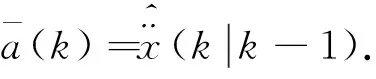
BP神经网络由3部分组成,分别为输入层、隐含层和输出层,其中输入层接受外界信息和数据输入,输出层则输出网络对输入信息和数据的处理结果,隐含层作为输入层和输出层的媒介,完成信息和数据的分析、处理过程。如图3所示。
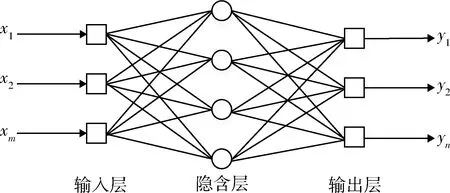
图3 BP神经网络基本结构Fig.3 Basic structure of BP neural network
神经元作为人工神经网络中信息、数据处理的独立单元,主要完成3个功能:加权、求和以及激活,其模型如图4所示。

图4 神经元模型Fig.4 Neuron model
(1) 加权:接受前一层传来的数据,并且每一个输入信号都对应一个不同的权重;
(2) 求和:确定全部输入在不同权重下的组合效果;
(3) 激活:将数据的加权和输入到激活函数,并将函数输出结果传递给下一层。
激活函数采用tansig函数,可以将一个实数映射到[-1,1]区间内,表达式为
y=2/[1+exp(-2x)]-1.
(18)
如图5所示。
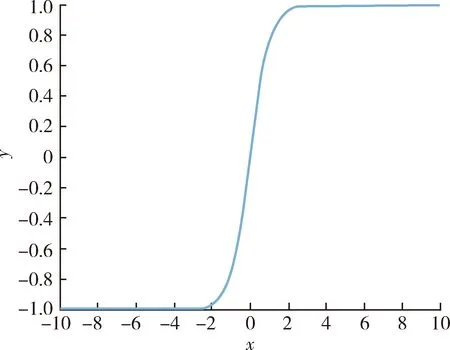
图5 tansig函数Fig.5 Tansig function
2.2 混合滤波器设计
将BP神经网络的学习和适应能力应用到卡尔曼滤波中,使滤波器兼备学习能力和估计性能,从而提高系统的跟踪性能。
输出滤波器的状态估计方程为
(19)
将估计方程做等价变形,有
(20)


图6 算法原理Fig.6 Algorithm principle
2.3 算法流程
(1) 网络结构与参数配置
X=[xyzvxvyvzaxayaz].
(21)
状态估计9维,残差3维,增益为9×3=27维,则输入节点数为39个,输出节点数为9个。本文设置隐含层为2层,节点数分别为45,9。学习率采用Levenberg-Marquardt算法。
(2) 采集训练数据集
本文采用有监督学习的方式离线训练网络,典型弹道及一些常见的机动弹道等弹道的跟踪结果进行数据采集,包含15 000个输入输出时间序列数据。
(3) 数据预处理
BP神经网络的激活函数将数据映射到(-1,1),需要对输出数据进行归一化处理,考虑到神经网络的输入数据之间存在很大的量级差别,为了避免因量级差异引起网络误差预测较大,需要对输入数据进行预处理。采用最大最小值方法进行数据归一化。用神经网络得到的预测结果还需要进行数据的反归一化处理,反归一化是归一化的逆过程。
(4) 网络训练
设置网络最大训练次数为3 000,训练精度为1×10-5,是输入输出数据归一化后的精度要求。设置隐含层的激活函数为tansig函数,输出层的激活函数为purelin函数。
(5)卡尔曼BP神经网络融合输出
将训练好的BP神经网络嵌入到卡尔曼滤波器中,形成混合滤波器。在对机动目标状态估计时,经过卡尔曼滤波得到网络的输入数据,需要一步数据归一化处理。而后将归一化数据输入网络得到输出数据,需要输出数据反归一化处理,得到网络预测的估计误差。
同时需要对网络的估计误差设置阈值检测,若估计误差超过阈值限制,则认为此次的网络预测值错误,对滤波估计值不进行修正。即:
(22)
3 仿真校验
3.1 仿真场景
为了验证本文所提算法的有效性,采用数学仿真方法进行验证,具体仿真场景如下:起点高度h0为45 km,起点经度λ0为152°E,起点纬度φ0为25°N,初速度v0为6 km/s,初始航迹角γ0为0°,初始航向角ψ0为260°,初始攻角α0为5°,初始倾侧角σ0为5°,仿真场景如图7所示。

图7 仿真场景Fig.7 Scene simulation
3.2 仿真结果
设置系统测量噪声服从干扰高斯分布:
vk~(1-α)N(0,Rk)+αN(0,λRk),
(23)
是2种高斯噪声的叠加。对目标的运动轨迹进行跟踪测试。本文设置两台红外探测器(S1,S2),高度为30 km,分别布置在(120.0 E,42.9 N),(116.5 E,40.1 N)完成对目标的探测定位。
选择指标为均方根误差(RMSE):
(24)
式中:N为蒙特卡罗仿真次数;下标i代表状态向量的第i个分量;j代表滤波第几步;k为第k次蒙特卡罗仿真。
跟踪时间为150 s,进行50次蒙特卡罗仿真结果如图8,9所示。

图8 位置RMSE对比图Fig.8 Speed RMSE comparison

图9 速度RMSE对比图Fig.9 Location RMSE comparison
由上述仿真结果可知,经过BP神经网络补偿后的混合滤波器明显收敛速度更快,而且跟踪误差要小很多。跟踪精度有大幅度的提高。轨迹更加光滑。说明输入预测估计值与滤波估计值的差值、滤波增益和新息,通过神经网络可以很准确地预测估计误差。
4 结束语
本文针对高超声速飞行器运动轨迹跟踪,在当前统计模型的基础上,提出了一种高超声速飞行器在线反馈滤波算法。仿真结果表明,此在线反馈滤波算法应对高超声速飞行器具有良好的跟踪能力,利用此算法可以获得更高的滤波精度和稳定性。
