二维变分模态分解在SAR图像特征提取及目标识别中的应用
2021-03-23毛舒宇岳凤英
毛舒宇, 岳凤英
(中北大学电气与控制工程学院,太原 030051)
0 引言
特征提取和分类决策是合成孔径雷达(SAR)目标识别算法中的两个关键阶段[1]。特征提取通过SAR图像分析获得鉴别力描述,为分类决策提供输入,主要有目标形状类、像素投影类和电磁散射类。文献[2]采用目标轮廓描述子进行SAR目标识别。文献[3]提出一种基于二值区域匹配的SAR目标识别方法。投影变换特征获得SAR图像在特定投影方向或变换域的表示。其中,代表性投影特征提取算法有主成分分析(PCA)、线性鉴别分析(LDA)等[4]。文献[5]将单演信号用于SAR图像分解,基于分解成分设计SAR目标识别方法。电磁散射特征的典型代表是散射中心,文献[6-7]就是利用属性散射中心匹配进行SAR目标识别。文献[8]通过层次化方式融合多种特征提高SAR目标识别性能。分类阶段通过采用已有的或设计的分类器开展决策分析。传统模式识别领域为SAR目标识别提供了大量可用的分类模型,如最近邻分类器(NN)[4]、支持向量机(SVM)[2,9-10]、稀疏表示分类(SRC)[11]等。其中,SVM作为一种经典的分类器,在SAR目标识别中的应用最为广泛,用于多种特征的分类[2,9-10]。近年来,深度学习模型也在SAR目标识别中得以运用,如卷积神经网络(CNN)[12-13]。
本文将二维变分模态分解(BVMD)[14-17]用于SAR图像分解及目标识别,从特征提取和分类决策两方面着手提高最终的目标识别性能。采用BVMD对原始SAR图像进行分解,获得多成分的分解结果。这些分解成分能够很好地反映原始SAR图像的二维时频特性及目标的全局和局部特性。在分类阶段,采用SVM对原始SAR图像及其BVMD分解结果进行独立分类,获得相应的结果(后验概率矢量)。对这些结果采用线性加权融合进行综合分析,获得融合后的决策矢量。最终基于融合结果判定待识别样本的目标类别。实验中,基于MSTAR数据集对所提方法进行测试,结果验证了所提方法的识别性能优势。
1 二维变分模态分解(BVMD)
DRAGOMIRETSKIY和ZOSSO设计提出了VMD算法用于一维信号分解并验证了其有效性和稳健性。通过VMD分解,原始信号被分解为不同频段的若干成分,从而更为全面地反映原始信号的时频特性以及细节特征。VMD分解主要通过变分问题的构造和求解实施。
对于信号x(t),基于VMD将其分解为K个模态,即
(1)
式中:uk={u1,u2,…,uK}表示K个模态;wk={w1,w2,…,wK}为相应的中心频率。
通过拉格朗日乘子算法对式(1)进行求解,获得

(2)
式中,λ(t)和α分别对应拉格朗日乘法算子和惩罚因子。
(3)
(4)

根据上述推导,VMD算法的具体实施可分为以下步骤:
2) 采用式(3)、式(4)分别对uk和wk进行更新;
3) 采用算式
(5)
对参数λ进行更新;

BVMD与VMD的基本原理和实施思路一致,具体过程参见文献[15-17]。本文采用BVMD对SAR图像进行分解,从而获得多层次的特性描述。这些分解结果可对原始SAR图像进行补充描述,从而为正确识别提供更为充分的鉴别力信息。
2 方法描述
2.1 支持向量机(SVM)
SVM通过最小化结构风险的方式获得概率意义上的最佳分界面,实现多种模式的分类[18]。SVM自提出以来便在模式识别问题中得到广泛应用和验证。文献[9]将SVM用于SAR目标识别并验证了其相对传统模板匹配的显著优势。对于未知类别的模式x,SVM的决策面定义为
f(x)=ρT·φ(x)+b
(6)
式中:ρ表示权值矢量;φ(·)代表核函数,不同核函数可实现不同的线性或非线性投影;b为常数偏置项。
2.2 线性加权融合
如前文所述,多层次的分解结果可以为分类提供更多可用的信息。具体地,本文选用SVM作为基础分类器,分别对原始SAR图像及其BVMD分解成分进行识别,获得相应的分类结果,即后验概率。记P个相应的后验概率分别为ft(i)(t=1,2,…,P;i=1,2,…,C),采用线性加权的形式对其进行融合,即
f(i)=ω1f1(i)+ω2f2(i)+…+ωPfP(i)
(7)
式中:ωi(i=1,2,…,P)为对应权值;f(i)(i=1,2,…,C)对应不同类别的融合后验概率。
综上所述,本文方法的实施可以归结为以下步骤。首先,基于BVMD对训练样本进行分解,构建原始SAR图像以及相应分解成分的训练样本,具体地,选用BVMD分解得到的前3个层次的成分代入本文方法;在此基础上,采用SVM分解对测试样本的原始SAR图像及对应分解结果进行独立分类;然后,基于式(7)中的线性加权算法对输出的决策变量进行融合,获得最终的决策变量,其中,4个权值分别设置为0.4,0.3,0.2,0.1,体现不同成分的不同重要性;最终,基于最大概率的准则可判定测试样本的目标类别。
3 结果与讨论
3.1 数据集介绍
MSTAR数据集包含10种车辆类目标,且其中部分目标具有十分相近的外形和结构。MSTAR数据集中,SAR图像分辨率达到0.3 m,各类目标的方位角覆盖0°~360°,俯仰角有15°,17°,30°和45°等典型值。MSTAR数据集中的丰富样本为实验设置提供了良好的基础。基于此,可以在多种条件下对设计的SAR目标识别方法进行测试和验证。表1显示了基于MSTAR数据集设置的标准操作条件:训练和测试集中的各目标具有相同的型号但俯仰角存在一定的差异。除此之外,还可以设置诸如俯仰角差异和噪声干扰等扩展操作条件对本文方法的稳健性进行验证。
实验中选用现有文献的若干方法进行对比,定量评估本文所提方法的识别能力,分别是文献[3]中目标区域匹配方法、文献[5]中单演信号方法、文献[6]中散射中心匹配的方法和文献[12]中采用CNN的方法。
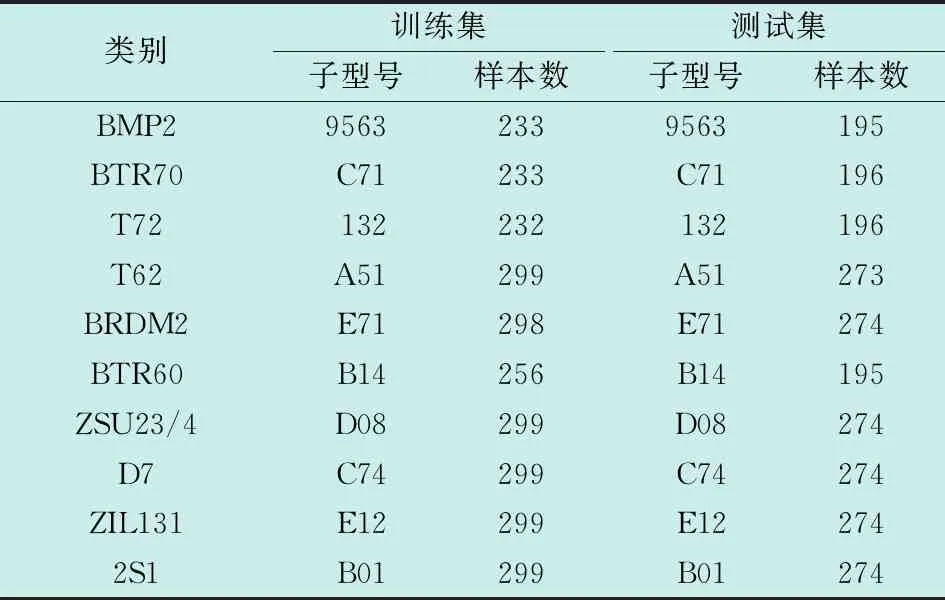
表1 MSTAR 10类目标的训练和测试样本
3.2 实验结果与分析
3.2.1 标准操作条件
在表1所示的标准操作条件中,测试与训练集图像获取条件相近,主要用于测试SAR目标识别方法的基本有效性。本文方法的结果展示见图1。该混淆矩阵中,横、纵坐标分别对应样本的真实类别和分类类别;对角线元素则为该类目标的正确识别率,计算可得10类目标的平均识别率为99.24%,充分体现了本文所提方法的有效性。作为对比,表2列举了所有方法在当前条件下的平均识别率。CNN方法的平均识别率达到99.08%,仅次于本文方法,说明了深度学习方法在标准操作条件下具有高性能。区域匹配以及散射中心匹配方法在此条件下的识别率相对较低,这主要是目标二值区域或散射中心集会在一定程度上导致部分鉴别力信息的缺失。通过对比可以看出,本文方法在标准操作条件下具有性能优势,充分验证了BVMD对于SAR图像特征提取以及决策层融合的有效性。

图1 标准操作条件下具体结果
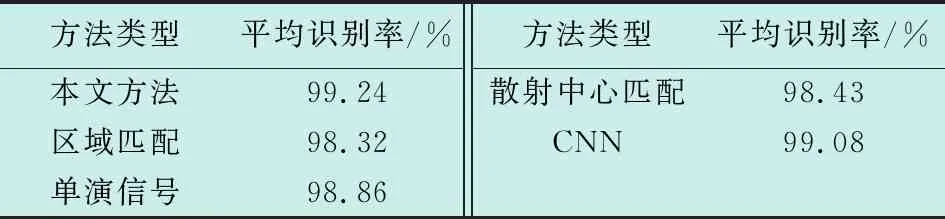
表2 标准操作条件下的平均识别率对比
3.2.2 俯仰角差异
与标准操作条件不同的是,扩展操作条件下测试样本与训练样本具有较大差异。俯仰角差异作为一种常见的扩展操作条件,主要指的是测试与训练样本的测量俯仰角显著不同。如表3所示,3类目标的17°俯仰角SAR图像为训练集;测试集分别包含30°和45°两个俯仰角。经过逐一测试,各类方法的平均识别率展示如图2所示。在30°俯仰角下,尽管相比标准操作条件各方法性能均出现了下降,但平均识别率仍可以保持在95%以上;而对于45°俯仰角,明显看到性能的下降。这一现象反映了俯仰角差异带来的测试结果和训练图像之间的显著不同。根据图2,可以判断本文方法对于俯仰角差异具有更高的适应性,取得了最高的识别性能。区域匹配和散射中心匹配方法在当前条件下的性能总体优于单演信号以及CNN方法,主要是因为这两类特征对于俯仰角差异具有一定的稳健性。本文方法通过综合运用BVMD分解得到的多层次特征,有效提升了在俯仰角差异下的整体识别性能。

表3 俯仰角差异的训练和测试集
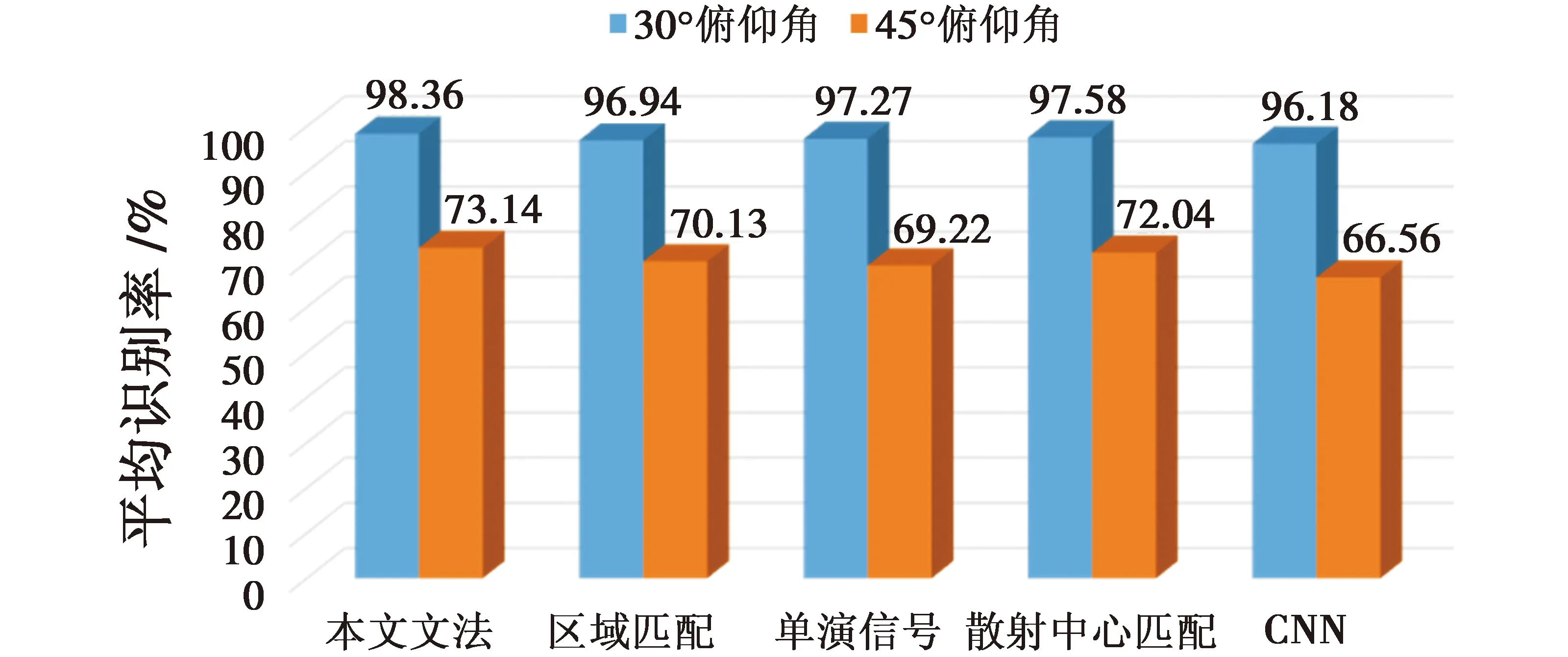
图2 俯仰角差异下识别结果
3.2.3 噪声干扰下的识别性能
噪声干扰主要是指测试样本信噪比(SNR)相对训练集较低,导致两者之间存在较大的差异。按照现有文献中的思路[6],本文向表1中的测试样本添加不同程度的噪声,得到不同信噪比下的测试集。据此对各类方法在噪声干扰条件下进行测试,获得如图3所示的识别结果。

图3 噪声干扰下的识别结果
可见在噪声干扰的情景下,各方法的性能不同程度出现下降。在每个噪声水平下具体比较,可得出本文方法稳健性更强的结论。散射中心匹配方法的噪声稳健性仅次于本文方法,主要是因为属性散射中心的提取过程有效剔除了噪声干扰的影响。本文使用的BVMD在图像分解过程中也考虑了存在噪声的影响,因此最终的分解结果具有良好的噪声稳健性,通过决策层的融合可以进一步提高最终的识别性能。
4 结束语
本文将BVMD应用于SAR图像特征提取,获得多层次的分解成分,这些成分可有效反映目标的二维时频特性及目标的全局和局部细节信息。采用SVM对分解得到的各个成分进行独立分类,进而基于线性加权融合对它们的结果(后验概率矢量)进行分析和决策。实验中,在MSTAR数据集上设置标准操作条件、俯仰角差异条件以及噪声干扰条件,对本文方法的有效性和稳健性进行测试。根据实验对比结果可以看出,本文方法在SAR目标识别应用中具有一定的性能优势。