一种节能航道检测船的研究
2021-03-23宋胜利
宋胜利
(山东理工大学机械工程学院,山东 淄博255049)
1 研制背景及意义
在航道检测领域,传统人工检测存在操作难度大、检测效率低、危险系数高等问题;新兴水下机器人检测成本高昂、所受干扰较大、能源消耗较多。本团队所采用的航道检测无人船可有效避免以上问题,但现有无人船采用单一电池供电,续航时间短、通信距离有限,不适合野外长时间作业,电池容易损坏会浪费大量电能,造成环境污染。由此看来,将航道检测无人船与可再生能源相结合具有重大发展意义。
2 设计方案
2.1 总体设计方案
2.1.1 整体思路设计
该太阳能水路航道检测无人船共由四个基本单元和一个系统组成。包括运动单元、控制单元、动能单元、通信单元以及多波束测深系统。此无人船通过采用三元锂电池、利用太阳能充电,提高电能利用率,以此实现节能减排的目的。
运动单元为船体的机械运动提供动力,并根据实际情况调整无人船前进的速度和方向;控制单元主要实现自动避障功能和巡航功能;动能单元由三元锂电池、太阳能、电机冷却系统组成,由电能调节系统对电池进行管理,为船体提供所需能源;通信单元是通过无线遥控和地面基站实现通信功能;多波束测深系统利用同时发射和同时接收多个波束对水底进行条带式全覆盖测量,能够一次性给出与航道垂直的垂面内多个被测点的水深值。
2.1.2 设计模型与实体
为了使船体本身的重量对船舶航行时造成的干扰降低到最小化,无人船二代采用EPO 泡沫板作为主体材料,代替一代的钢材,这样可以避免由于船体过重下沉引发的安全事故出现。此外,我们对无人船的二代的内部配件也做了优化处理,最主要的部分体现在将冗杂的线路简单化,使各个单元之间的联系更加清晰,整体设计更加简洁高效,从而可以在一定程度上提高工作效率,如图1。
2.2 节能减排的具体应用
2.2.1 利用太阳能
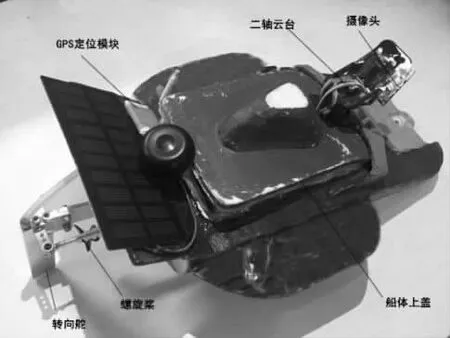
图1
太阳能电池板安装在无人船尾部使太阳能板呈40°倾斜[5],使其在降水时能够迅速泄水,以保护太阳能板以及甲板上的仪器设备。顶部太阳能电池板不受静态阴影影响,发电时始终保持最高效率。而且这种安装方式对太阳能电池本身起到一定的保护作用,试验数据显示太阳能板的工作寿命由最初的15 年左右延长至20 年以上,该太阳能航道检测无人船实物模型在测试过程中进行了太阳能发电及充电的稳定性测试,测试中充电过程可以正常运行。通过查阅资料,我们对当地日照情况进行分析可知,本地全年日照时长为1739 h,年日照率为41%,年平均日照当量为1350kWh/m2年,标准日照4.5 时/天。根据太阳能板面积为0.1344 m2计算得出,该无人船每年利用太阳能可达18.114kWh,超出传统无人船装置太阳能利用率15%。从而能够实现进一步降低能量消耗,真正达到节能减排。
2.2.2 三元锂电池
我们在详细对比了多种锂电池的成本、性能、寿命、单位电能等多个方面,最终选定了三元锂电池作为无人船的能源供给。三元锂电池采用镍钴锰酸锂做正极材料,与磷酸铁锂电池相比最大的特点是单位电能比较大,具有寿命长、循环次数多、自放电少、较高充放电倍率、体积小、重量轻且对环境无污染等优点;并且从能量密度角度来说,三元锂电池具有绝对优势,相同安时的电池,三元锂电池续航时间更长,能够节省大量电能。商业化三元电池放电电压平台高、比容量高,三元电池单体和模块的能量密度超过200Wh·kg,高于磷酸铁锂电池(约136Wh·kg),因而可以为电动汽车提供较长的续航里程[6]。相应的也可以为无人船提供较长的续航里程。

表1 三元锂电池与磷酸铁锂电池的性能比较
经过比较,三元锂电池在环保、能量密度以及循环寿命等方面有着明显的优点,续航里程更长,更适用于本无人船,可以更好的进行太阳能充电,达到节能减排的目的。
2.2.3 电机智能冷却系统降低额外能耗
本产品的电机智能冷却系统采用水冷方式,大幅度节约了散热消耗的电能,并保证电机的正常运作。为维持电机正常工作温度,采用DS18B20 温度传感器控制冷却系统的执行与停止。产品模型的转向舵内部中空,下部有孔。船体内部有一个节流阀,若电机实际温度高于电机正常工作温度,则节流阀打开;反之,则节流阀关闭。节流阀的开孔大小和温度成正比,若温度太高,单片机会发出警报提醒,并控制停止电机运转。

图2 内置的温度传感器模块

图3 内置的光线传感器模块

图4 冷却系统工作原理
2.3 电能调节
信息传输安全性、动力装置稳定性以及远程操纵可靠性是无人船发展所面临的三个挑战。团队就动力装置稳定性方面,制定了电能输出调节系统。其功能是在无人船航行过程中,保证各个部件工作电压、电流的稳定,对电池电能进行合理分配,提高电能的利用率,从而使得各个部件能够保持正常工作,快速反馈有效数据。作品采用了STM32F103RBT6,该系列处理器功耗超低,性能优越,集成度高且拥有丰富外设,其涵盖了GPIO、ADC、CAN 等标准外设。
2.4 更精准的多波束测深系统
无人船上采用多波束测深系统,利用同时发射和接收多个波束对海底进行条带式全覆盖测量,它能够一次测量出与航向方向多个垂直面内几十个甚至上百个被测点的水深值。传统的单波束测深仪,是利用振荡电路产生一个振荡电压,然后将此电压施加在换能器中的压电陶瓷块上,利用电压陶瓷的压电效应将产生的声波发射出去。对于多波束系统来说,其单个波束发射过程与单波束测深仪相似,但多波束系统需要同时发射多个波束,所以二者电路组成有所不同。在多波束系统工作过程中,船姿传感器感知的船姿信号和发射模式信号一同传给信号处理器,信号处理器将处理好的信息送到多通道变换器,形成多个波束发射信号。之后这些信号经过功率放大等过程分别被送到相应的换能器单元,并发射出去。因此它能精确地、快速地测出一定宽度内水底地貌的大小、形状和高低变化,从而比较可靠地测定水深、描绘水底地形地貌的精细特征。
3 节能分析
3.1 在并入太阳能电池板后,经过实际充电测算,得出在天气晴好的条件下,模型船所配电池充满电量所用时间约为40 分钟,比传统充电方式节约约29 分钟的时间。
3.2 在加入三元锂电池并改进电能调节系统后,无人船的续航能力大大提高,单次航行可节约30%的能源,实现了能源的节约。
4 结论
长期以来,我国地方政府多次强调提高技术是节能减排的有效手段,它是在保证经济发展的同时达到节能减排的目标。本无人船装置充分利用太阳能充电、三元锂电池供能等多种节能减排的方式,有效减少能源消耗。随着海洋资源的不断探索和开发,利用无人船进行海洋地形测绘将成为海洋资源开发的重要技术革新;未来无人船救援市场及使用领域也会更加广阔。
本项目参考未来无人船的发展趋势,设计了一种灵活、实用、操作简便、高效利用可用能源的无人船航道检测装置。可以有效解决传统地形测绘工作中成本高、周期长、操作复杂、安全性差等问题。可以及时进行航道路况的检测,有效避免轮船在航道中因天气恶劣、无法抛锚而造成的触礁事故发生。可用于未知河道或海洋领域的航道安全规划,提前规划好轮船运行路线,减少人力劳动,降低水路航道探测成本。