一种双臂魔方还原机器人机构设计*
2021-03-22阮嘉宏翁涌杰俞龙杰邹赵渭储博凯江晓亮
阮嘉宏,翁涌杰,俞龙杰,邹赵渭,储博凯,陈 龙,江晓亮
(衢州学院 机械工程学院,浙江 衢州 324000)
0 引 言
随着科学技术的不断发展和工业化的日趋成熟,智能和自动化正逐步取得突破性的进展,各行各业在迫切地需求综合性强的智能机器人。智能魔方还原机器人便是其中综合性的重要体现。结合多方面考虑,魔方还原机器人对机械步骤响应、还原速度,判断识别成功率以及效率,机械动作准确度都有极高的要求。目前一个能稳定快速还原魔方的机器人设计难度较高,需要有较多的技术综合,因此研究解魔方机器人的设计具有一定的科研价值及创新意义。
笔者针对这些上述要求提出了一种双臂二指型魔方[1]的结构设计方案,设计目标是快速稳定还原任意打乱的魔方。该机器人结构设计便于操控与移植算法,整体稳定型较高,普适性较强,成本低,具有高度扩展性。
1 总体方案设计
该双臂解魔方机器人设计包括机架和框架,两个臂,图像采集系统和控制系统。每只手臂由步进电机,支架,联轴器,气动滑环,气动手爪组成[2]。步进电机通过支架与底座固定,电机与滑环通过联轴器和光杆来连接,并用自己设计的3D打印零件将滑环的定子固定在底座上,最后气爪与滑环的转子相连接[3]。该机构使用一对1080P摄像机捕获图像,从而在确保识别稳定性的同时加快了识别速度。图1显示了魔方机器人的整体结构。

图1 魔方机器人总体结构图
上位机(计算机),下位机(STM32F407ZG微控制器),两个步进电机及其驱动器,机器支架(40*40铝材)、摄像头、气动滑环、气爪,电磁阀,气瓶,控制部分包括单片机和驱动控制机构[4],两个图像采集装置安装在还原手臂的对角线上,第一机械臂和第二机械臂分别安装在机架上。在上方,第一机械臂和第二机械臂的轴线彼此垂直交叉以形成魔方夹具。
左右机器臂分别通过驱动控制机构与单片机连接,摄像装置与单片机连接[5]。双臂解魔方机器人不需要改变魔方的本体,利用经优化过的图像识别结构,提高魔方识别效率的同时缩小了机器人的总体体积,节约成本,方便制造。
2 魔方机器人结构设计
2.1 机械臂结构设计
该魔方机器人结构还原魔方需要靠两只机械臂中57步进电机带动联轴器,通过联轴器与气动滑环、气缸手爪相连。通过自制的气动滑环支架支承,由此减少了步进电机工作时径向滑移带来的偏差以及减小了摩擦力,节约了功耗[6]。气阀固定在底座上与气缸手爪相连,较细的通气管保证了气流流体的连续性,能精准快速的完成动作。两只机械臂呈现水平方向与竖直方向90°的位置摆放,能够最大程度上的固定魔方初始还原位置,减少还原魔方时机械臂的运动带来的机体振动,在提高魔方色块识别率的同时稳定还原时机体动作,提高还原成功率。
通过对魔方尺寸与机器人本身的配合关系的研究,将魔方手指设计为二指结构,在保证夹持力度的同时减小体积与转动惯量,方便夹持与配合电机旋转,定为气动手爪二指间距导程要在86~135 mm之间,由此利用3D打印设计了阶梯指与气动手爪相连,在第二阶梯面上附着2 mm厚度的橡胶片来增大摩擦力与对夹持时手指的闭合进行缓冲,阶梯指中阶梯尺寸为长14 mm,宽10 mm,另有5°的倾角,在此状态下机械臂手指对于魔方的夹持力度较大且稳定又不影响识别效果。具体结构如图2所示。
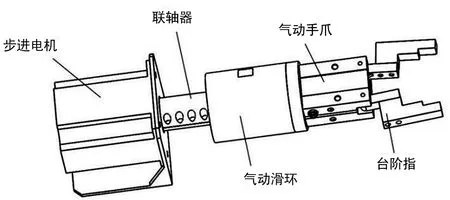
图2 机械臂结构图
2.2 气动手爪结构设计的分析
在实际的还原过程中,机械臂的设计是实现还原功能最重要的事情。考虑到魔方机器人的可行性,体积和重量,该项目采用了两臂两指复位方法。这种手臂设计方式体积较小,结构简易紧凑,二指的夹持力度较大,十分适合用以还原魔方。具体结构如图3所示。
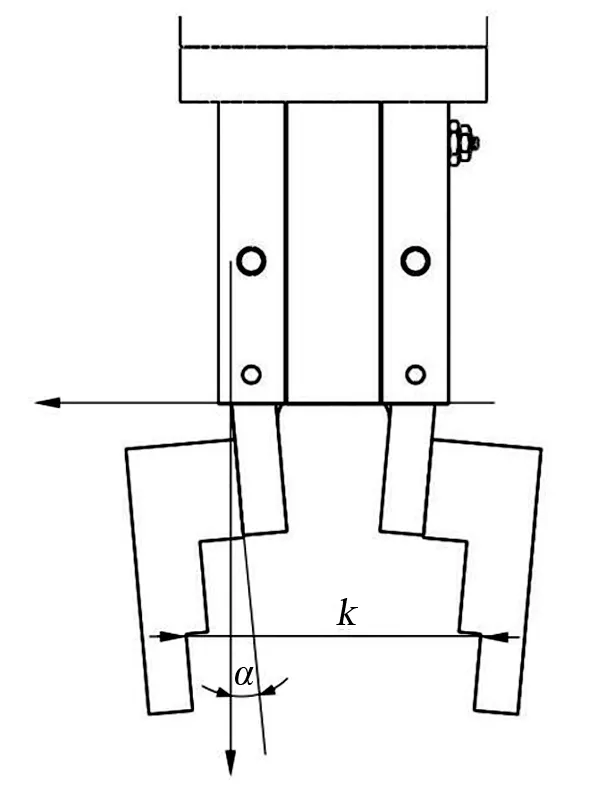
图3 机械手爪结构图
手指作为夹持魔方的部分需要在气动手爪的导程与夹持力度之间做出协调。3阶魔方的尺寸为57×57×57 mm3。要牢固地夹持住魔方,需要手指闭合的情况下,手指间距k略小于57 mm。因此,选择了最小闭合角度α为7°的气动手爪,由此通过3D打印的方式,设计出了使用PLA材质的阶梯手指。阶梯部分用于在放置与还原过程中对魔方进行定位与限制作用。k值的大小在我们多次实验中确定为53 mm,这样的k值能让阶梯指牢牢地夹住魔方的同时不至于将魔方挤压变形或是挤压至与另一手臂发生干涉[7]。
2.3 魔方识别结构设计
如图1所示,该设计使用双1080P摄像机捕获图像。两个摄像头分别固定于机械臂加持魔方的45°方向,与所要加持的魔方相距24 cm。在方案中,摄像头每次可以拍摄一张带有魔方相邻两面的图片,通过透视变换与图像拼接把第一次拍摄的两张包含4个面的图片与通过机械臂转换魔方朝向后的第3、4张照片组合,这样就得到了魔方6个面的图片[8]。
通过去噪,分割和取6张图像的平均颜色等预处理操作,输出图像的颜色信息,再通过Python中的Kociemba算法库对输出的魔方色块信息进行求解,得到一组解字符串。再返回上位机,输出电脉冲信号分别去控制电磁气阀与步进电机,对手臂进行旋转与夹持的控制,以实现魔方的还原。
2.4 框架结构设计
为保证图像识别便利与还原动作的迅速,本项目采用了水平与竖直摆放手臂的方案[9]。这种结合方式通过手爪的台阶手指与夹持定位器之间的配合能够保证每次的夹持都可以使魔方在同一位置,避免了魔方位置改变而去影响图像采集与切割、还原时手爪夹持错位等问题。夹持定位器如图4所示。

图4 夹持定位器
定位时将魔方放入夹持定位器内,再将气动手爪张开,把夹持定位器两条定位边架在气动手爪的台阶指上,把夹持定位器延垂直于手爪方向滑移取出,最后将手爪合拢夹持,这样就便利地完成了魔方的安装[10]。
魔方机器人主体部分为40×40的铝材框架包围成的立方体,结构紧凑小巧,这样的框架在减少机器人重量与体积的同时可以有利于魔方还原时的稳定,减少机器振动,提高还原效率与成功率。
3 结 语
此次二指魔方还原机器人的结构综合了以往魔方机器人的各类优势,将体积小、重量轻、结构紧凑、功能实现稳定等优点融为一体,相较于传统魔方还原机器人,降低了大量成本,精简了结构设计,使其能够适应各类环境限制,能在多种场景下进行魔方还原功能。顺应了机器人的发展方向,朝着综合性强、自动化、普适性强的目标靠拢。