基于线翎电鳗运动模式的水陆两栖机器人设计*
2021-03-22肖杰康黄永欣林镇炜黄明威
肖杰康,黄永欣,林镇炜,黄明威
(东莞理工学院 机械工程学院,广东 东莞 523000)
0 引 言
在地球上有着多种环境,在未知环境中许多未知环境存在着危险的陷阱,例如空气氧气含量,空气中是否存在有毒气体,岩洞中是否存在异生物或坍塌的危险等;除此之外,当生活中发生一些意外事故,如楼房坍塌,地震以及爆炸等,这些都需要对灾后环境进行勘察,以确保灾后环境修复过程中工作人员的生命安全。以上情况都是人类无法亲自进行探测的。在这种情况下,探测机器人是有必要的。
另外,绝大多数的水下推进器采用了螺旋桨推进系统,通过螺旋桨叶在水中的转动推动水流向后运动,从而将发动机的转动运动转化为推进器向前推进的运动。以螺旋桨作为推进系统的水下推进器,存在诸多缺点,例如系统体积大、重量大、瞬时响应的严重滞后、能量转化率低、效果差、可靠性难以保证、机动性能差、推进噪音大以及产生较大尾涡等先天性的劣势。
笔者提出一种能代替探测人员在复杂狭窄等未知环境进行简单勘测,拥有类鱼类MPF运动模式(Median and/or Paired Fin,中央鳍/对鳍模式)的水陆两栖仿生线翎电鳗探测机器人设计方案。水陆两栖仿生线翎电鳗探测机器人在水下运用鱼胸鳍的运动方式,拥有良好的运动性能,游动机动性强,鱼鳍受载面积大,游动扰动小,游动效率高的特点。其超凡的游动机动性能、低扰动性和高效性是传统的水下螺旋桨推进系统所望尘莫及的。另外,通过对仿生线翎电鳗探测机器人运动胸鳍进行再设计,在不改变其在水下的运动的情况下,让其拥有在陆地、沙滩、沼泽及雪地上运动的能力,扩大了探测机器人的可探测范围,并且确保了其能在一系列的环境上能精确的执行探测任务。
1 水陆两栖仿生线翎电鳗探测机器人的主体设计
1.1 仿生运动结构[1]
此次研究的仿生对象:线翎电鳗,身体呈刀型,全身漆黑如墨,造型奇特,因此又称“黑魔鬼”。属大型鱼,成鱼体长45~50 cm,最长可长至60 cm。如图1所示,尾柄突出如棒状,身体呈刀型,体形侧扁,背部光滑呈弧线形,腹鳍和臀鳍相连,呈波浪状直达尾部。没有背鳍,臀鳍宽大而发达,尾鳍延长似棒状。线翎电鳗的运动模式的就是通过腹鳍和臀鳍进行正弦波浪式摆动从而推动身体在水中移动。文中根据其运动特征进行仿生并优化拓展,最后得出此文水陆两栖仿生线翎电鳗探测机器人的运动结构。如图2所示,其为水陆两栖仿生线翎电鳗探测机器人的内部结构。
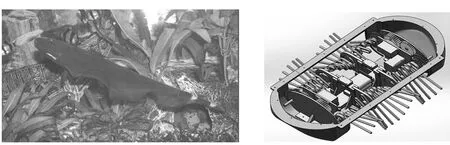
图1 线翎电鳗 图2 机器人内部结构
机器人的运动结构分为仿生正弦波浪式运动结构、水陆运动模式切换结构以及固定结构。其中仿生正弦波浪式运动结构主要功能是模拟线翎电鳗的运动姿态,实现类鱼类MPF运动模式,让机器人能在水中能够进行快速移动,并且拥有噪音低,水面扰动小的特点;在陆地上也能够以此进行运动,实现探测功能。
仿生正弦波浪式运动结构(见图3)主要由两个曲轴(见图4)、多个摆动杆(见图5)以及固定框架(见图6)等机构组合构成,并且分别由两个步进电机通过齿轮减速传动控制。
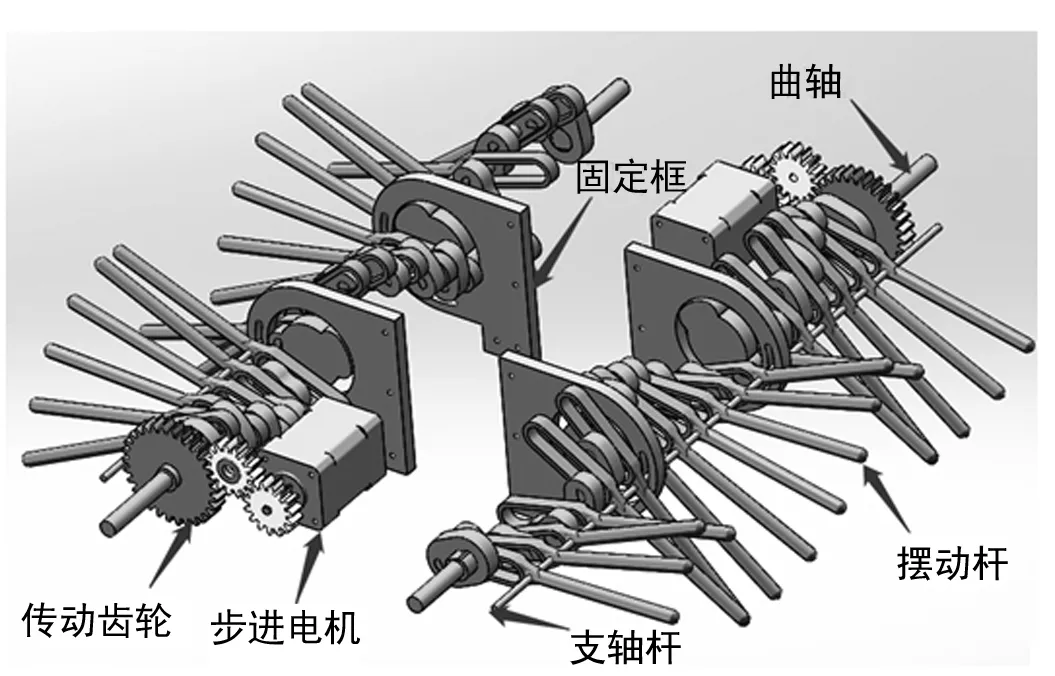
图3 仿生正弦波浪式运动结构

图4 曲轴 图5 摆动杆 图6 固定框
曲轴并非是一体化加工。一体化加工该曲轴会存在一定的缺点,如加工价格贵,加工工艺复杂,加工成品刚度难以保证等,因此我们的曲轴是通过多个零件拼接而成,保证其在拥有足够结构强度的同时方便加工。
如图7所示,曲轴一共由七种零件组成,分别是主转动轴、次转动轴、转轴、主轴板、次轴板、轴板和限制轴板组成。主转动轴的作用是传动齿轮进行固定配合,使步进电机上的转矩可通过该齿轮传递到曲轴上;次转动轴的装配位置与主转动轴同心,保证曲轴可以顺利旋转;转轴的作用是与摆动杆进行配合,限制摆动杆直槽部分不会脱离曲轴,同时把曲轴旋转运动转换为摆动杆的摇摆运动;主轴板、次轴板、轴板和限制轴板的作用都是用于连接相邻两轴件,保证每个相邻的轴颈相位差为40°。另外限制轴板与固定框配合,限制曲柄的最大弯曲,避免曲轴在瞬间过载的情况下发生崩断。

图7 曲柄
摆动杆除了与转轴配合外,还有一个圆孔与支轴杆进行配合。该配合是让支轴杆成为摆动杆摇摆的摆心。
运动结构由左右两个独立的运动装置构成,两个运动装置相同,由一个步进电机带动与其相连的齿轮,通过齿轮配合,带动连有18个摆动杆的曲轴进行转动。每个轴颈配合一个支杆,所有支杆的圆孔都连接着同一个支轴杆,支轴杆相对固定不动。通过步进电机驱动,使曲轴进行周转运动,让支杆达到正弦运动的效果,也就是类似线翎电鳗鱼胸鳍的运动方式。对两边支杆进行裹胶处理(如图8)后,使其变成翼状后,由左右两边运动装置的运动配合可以使得机器可以在水中灵活的进行前进后退转弯等行为,另外通过转换结构的变换,还可以令机器可以在陆地上行动。

图8 裹胶处理
水陆运动模式切换结构如图9(a)设计主要由两个180°舵机、4个小齿轮(模数2,齿数32)、4个大齿轮(齿数44)以及仿生正弦波浪式运动结构中的两个支轴杆组成。
水陆转换结构工作原理:转换结构由前后两个联立的运动装置构成,这两个运动装置关于中心原点对称,分别有一个180°舵机与一组齿轮机构相连,齿轮机构中的两个大齿轮(如图10)都有一直径和支轴杆直径大小一致的圆孔,通过其圆孔与支轴杆相连,两大齿轮的圆孔关于齿轮机构中心轴对称。在转换结构中各个齿轮轴皆已固定。当两舵机同时向同一方向转动时,即可控制支轴杆做圆周运动,从而改变运动模式,如水上运动模式见图9(b)变成陆上运动模式见图10(c)。

图9 水陆运动模式切换结构

图10 大齿轮
固定结构见图11由两个内定位架见图12和两个外定位架见图13组成。
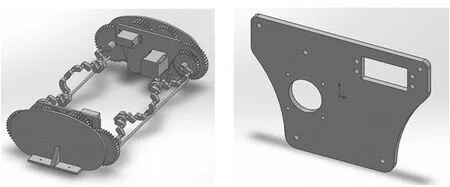
图11 支架 图12 内定位架

图13 外定位架
内定位架中的方槽、圆槽及其两槽周围的四个圆孔的作用分别为步进电机和舵机作固定,四角的圆孔的作用是与外定位架做距离控制及相对固定,剩余的圆孔是为切换结构中的小齿轮作定位固定。外定位架中最两边的两个圆孔的作用是定位并固定两条曲轴。在其后侧中两凸起的圆柱作用是定位并固定切换结构中的两个小齿轮。中央圆孔作用是定位并固定运动结构结构中的驱动齿轮。最下方的横向板的作用是方便整个水陆两栖运动结构更好地固定在其他机架中。
1.2 下壳部分
如图14所示,机器人的下壳部分集成了许多功能,是本文设计一个重点之一。如图2所示,机器人下壳内承载的许多部件,为了保证机器内部构件的稳定性及其装配的精确性。下壳内部有着许多定位孔位以及夹板,筋板等结构。孔位的作用是对仿生运动结构进行定位限制,减少运动期间的晃动;固定机器人内部的电子元器件,如步进电机驱动板、升压模块、STM32主板以及电池;下壳内部的四个夹板是为了与运动结构上的固定框连接。另外在下壳的上表面也同样有着孔位,其中前后两端的孔是用于和上壳配合,左右两侧的孔位则是为了方便运动结构外伸处防水膜的安装。
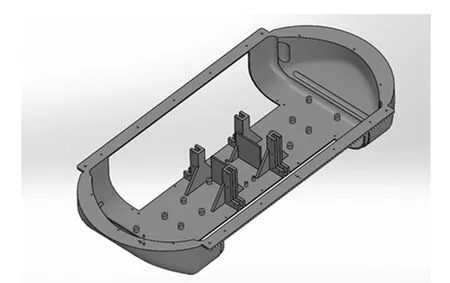
图14 下壳
下壳的整体外型是对称的,而且前后两端呈扁平状。对称性的外壳设计使机器人无固定的移动前端,方便其在水中的平稳灵活移动,保证其在水上运动时候的协调。扁平状的设计是为了减少机器人在水面上运动时候受到的水面阻力。
由于下壳内部结构的复杂,传统加工方法难以实现其生产;而且下壳的材料的密度不宜过大,避免机器人装配后整体密度过大,使其难以在水上悬浮。因此本文推荐使用新型的制造方法:3D打印,并且使用尼龙材料。
尼龙材料的优点耐高温、韧性好、强度高,可以作为功能件使用,适合结构极其复杂的产品。以下是该材料的性能参数:
热变形温度(0.45 MPa)(GB/T 1040.2-2006):145 ℃;断裂延展率(GB/T 1040.2):36%(考察材料是否适合攻丝、卡扣等韧性要求的重要指标,该材料适合5~10次攻丝);弯曲强度(GB/T 1040.2):46.3 MPa;热变形温度(1.8 MPa)(GB/T 1040.2-2006):82 ℃;拉伸模量(GB/T 1040.2):1600 MPa;拉伸强度(GB/T 1040.2):46 MPa;熔点:183 ℃;弯曲模量(GB/T 1040.2):1300 MPa;缺口冲击强度(GB/T 1843):4.9 kj/m2(相当于 ASTM Method D256A 标准下 49 J/m,为考察材料是否容易摔坏、断裂的重要指标,4 mm厚度的该材料产品70cm高度下自然落体不会破裂);无缺口冲击强度(GB/T 1843):13.2 kj/m2(相当于 ASTM Method D256A 标准下 130 J/m,为考察材料是否容易摔坏、断裂的重要指标,4 mm厚度的该材料产品70 cm高度下自然落体不会破裂);介电常数 60 Hz:3.5。
1.3 上壳部分
如图15所示,上壳的主要作用就是与下壳形成密封腔体,确保内部运动部件有足够的运动空间的同时,防止外环境中流体的渗入。除此之外,由于机器人的防水性要求高,因此在机器人装配完成后,上下壳不易于拆卸。但是机器人的电池在非工作状态的时候应该与被供电元件断开连接,避免电池能量的不必要浪费;电池需要在电量不足的时候及时进行补给;装配完成后的机器人需要进行调试,主板与电脑需要多次进行数据传输。因此上壳的中部有一个腔体,其作用是给内部电源安装开关按钮、主板数据传输口以及电源充电口。最后腔体上有一个密封防水盖,以防止水渗入导致电器元件短路烧坏。
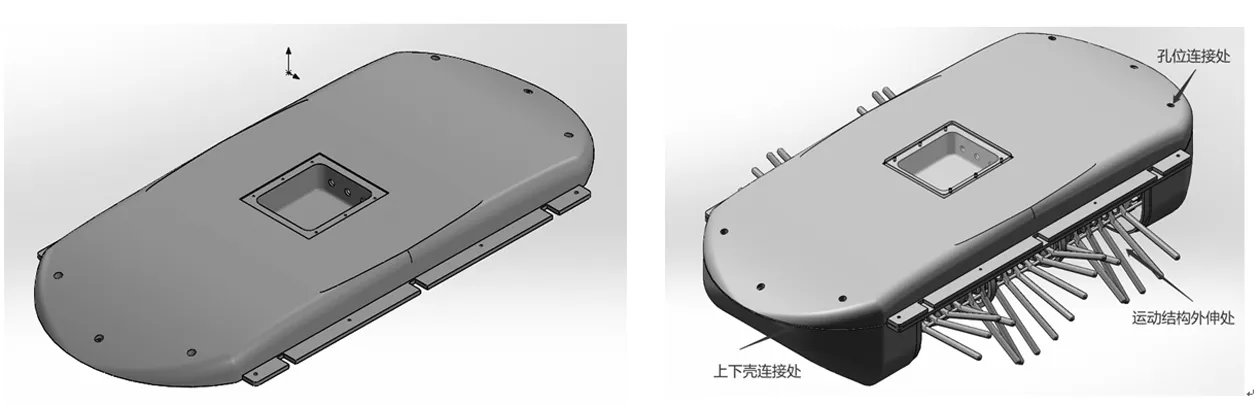
图15 上壳 图16 各结构连接示意图
1.4 结构防水部分[2]
水陆两栖仿生线翎电鳗机器人的外形扁平状,同时鱼体内部有电机和其他传动部件,必须合理的处理各个部位的防水静密封和动密封问题。在进行设计的过程中,要考虑不同部位的密封形式和特点,按照不同密封部位采用不同密封方法的原则,分类处理,做好各个部位的防水密封处理。
硅胶垫是硅胶制品中市场需求比较多的一类产品。有一定的张力、柔韧性、优良的绝缘性、耐压,耐高温,耐低温,化学性质稳定、环保安全、无异味,食品级硅胶垫具有无毒无味,不溶于水和任何溶剂,是一种高活性的绿色产品。此外硅胶垫也是工业上一种常用的结构装配防水材料。使用该材料作为机器人的防水材料在满足其防水性的同时也可以避免其对水环境造成不必要的破坏和污染。
如图16所示,机器人的各连接处都应该需要相应形状的硅胶垫片进行防水处理,通过螺栓螺母配合使两连接件夹紧中间的硅胶垫片,从而达到防水的效果。
1.5 程序控制部分[3]
水陆两栖仿生线翎电鳗探测机器人的主要运动是由步进电机转动转换而成,因此我们只需要简单的控制两边的步进电机转动就能使机器人运动。但是由于机器人的正弦波浪式运动受两边外伸鱼翼共同控制,为了保证机器人能稳定的执行前进以及转向功能,我们要保证两曲轴的初始状态应该是对称的,且记其为零点位置,在运动的过程中应该注意并记录两轴转动的相位差,在执行前进以及转向命令时,应该先让两轴回到零点位置。保证两鱼翼在运动过程中的产生的推力平衡,从而保证机器运动时的准确性。
除步进电机外,舵机的控制也有一定的限制,舵机控制的转换结构上的支轴杆应该时水平的,不水平的支轴杆容易因为过大的弯曲变形而导致断裂,使机器人的运动失效。因此两舵机只能同时且同向转动,两者转动的角度应该是一致的。
2 结 语
文中较为详细的介绍了一种基于线翎电鳗运动模式的水陆两栖机器人的设计意义及其设计内容,提出了各个模块的有效结合实现水陆两栖机器人的制作方案。通过多次实物实验测试,验证该机器人的水陆运动模式能在现实水陆环境中进行正常运动。基于线翎电鳗运动模式的水陆两栖机器人的设计对环境检测工作有一定的贡献。