便携式多用水果采摘器的设计与研究
2021-03-22尤蒙翔曹可炜
陈 聪,钱 茹,尤蒙翔,曹可炜
(东南大学成贤学院 机械与电气工程学院,江苏 南京 210000)
0 引言
随着前往果园、农家乐休闲娱乐人数的不断增加,水果摘杆开发具有广阔的经济利益和市场前景[1]。目前,国内市场常见的采摘设备,多使用拉拽采摘设备,采摘杆结构简单,使用效果差,对树木破坏严重,而在棚内的中低果树采摘工具仍留在徒手摘或剪刀摘,容易损坏果树。本文设计了一款安全可靠操作简单的水果采摘装器,旨在解决采摘过程中不破坏、无接触等问题,其中刀头是结构设计重点。
1 水果采摘杆结构
便携式水果采摘器主要包括旋转刀头、驱动齿轮、电机、伸缩杆体和月牙形的驱动部件,如图1所示。刀片和月牙形驱动部件安装在收纳筒的顶端,果实收纳筒与伸缩杆相连接。旋转刀头由5个形状相同大小一致的鸢尾形刀片组成,刀片闭合形成一个正圆。刀头驱动部件共有5个,月牙形连杆结构相同。收果筒内装有电机、开关、小齿轮,旋转刀头恢复张开,伸缩杆由底部电机控制伸缩。
2 旋转刀头结构及组成
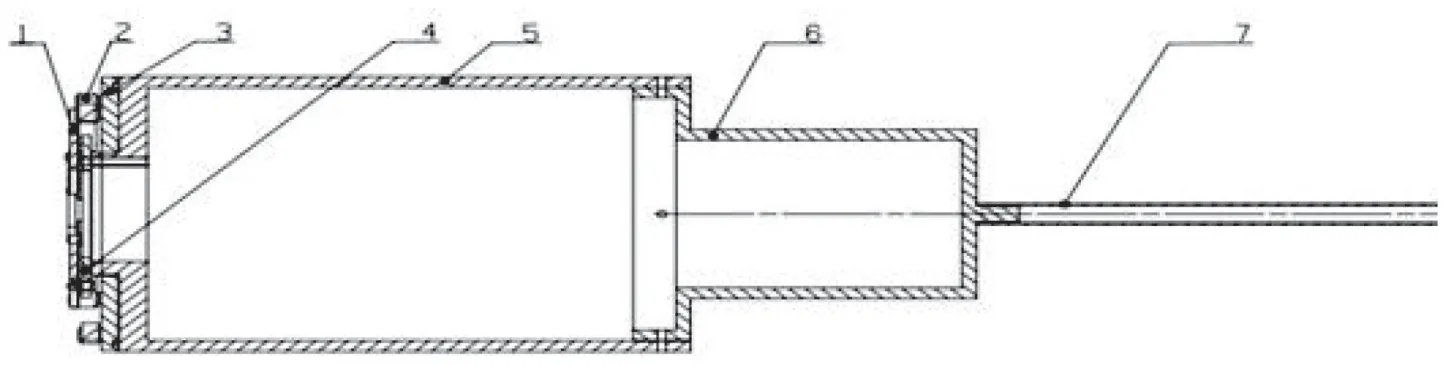
图1 便携式水果采摘器结构
采摘过程需对果柄以上部分进行机械断裂处理,本设计选择将果柄从果实中分离出来,并保留一定长度的果柄于果实上[2]。末端执行器的采摘结构如图2所示。选择五片环形刀片与摄像头光圈类似排列的方式,对果柄进行剪切处理,选择适合的连杆机构设置末端动作方式,以人力为动力源,提升游客的采摘趣味性。该旋转刀头对剪枝采果起着决定性的作用。5枚鸢尾花形刀片的设计灵感来自于鸢尾花花瓣的形状和相机光圈,应用UG NX软件进行结构三维模型设计。旋转刀头包含固定环,5个刀片,5个月牙形驱动连杆,连杆驱动槽,限位销和定位环。定位环上有5个孔,便于减小摩擦。定位环底部固定于存果筒筒口,定位环外有驱动齿轮,5个月牙形驱动连杆的一侧固定在定位环上部,月牙形驱动连杆另一侧用定位销连接刀片前根,刀片后根定位于固定环上,固定环固定于存果筒上部。5片大小相同的刀片闭合后形成一个圆,可以剪断果枝。
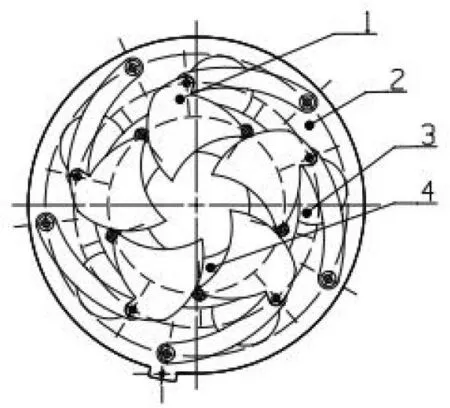
图2 旋转刀头结构
3 采摘杆工作原理
采摘杆旋转刀头中心圆部分对齐果实并将果实容纳其中,按压电动机开关,电动机驱动齿轮带动月牙形连杆摇摆运动,连杆驱动刀片图张紧进行剪切果实树枝干,目标果实滚入果实收纳筒后关闭电动机,将采摘杆倒置可将果实取出。当目标果实高度不一可按压伸缩杆开关,重新调整伸缩杆长度进行定位和继续采摘。
4 力学理论分析
水果采摘杆由电动机带动齿轮旋转,齿轮驱动连杆带动刀片进行张闭运动进行切割剪断果枝。果树枝干所受切应力τ为:

式中:Ft为剪切力;As为果树枝干截面面积。
由于果树枝干横截面近似正圆,则截面积As为:

式中:R为果树枝干截面半径。

式中:M为转矩,L为切割点到连杆端的距离。
5 伸缩杆及电机参数
考虑到电源的供应方便性,依靠电池提供动力,决定采用直流电机作为电源的选择。考虑到采摘水果对转速,扭矩等要求较低,采摘果实实际情况与户外采摘工况相结合,选择了XD-37GB520减速机机型。伸缩杆的电机参数是:电压为12 V,伸缩速度为15 mm/s,电流为0.6~2 A,推力为1 000 N。
6 运动仿真分析
UG NX是三维建模和仿真等于一体的制图软件[3]。本文应用软件选定连杆,添加运动副,选定驱动组件,进行刀片开合运动仿真,并选定简谐运动方式。采摘杆刀头组件移动的位移大小以及刀片伸缩速度对采摘安全性以及效率有很大的影响。基于软件得到如图3—4所示的速度与时间仿真图像,连杆位移与时间仿真图像。结果表明旋转刀头可以按照确定的路线运动,并且安全可靠。

图3 刀片速度与时间图像
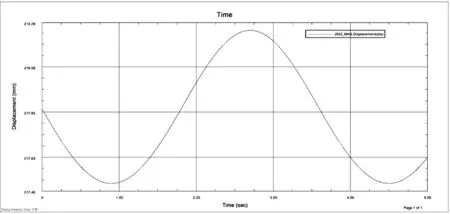
图4 连杆位移和时间图像
7 结语
该采摘杆通过对现有采摘杆进行改进,针对现在农家乐大棚采摘的兴起,设计的一款面向无采摘经验人群使用的实用型采摘器。该水果采摘杆加工成本低,适用于采摘不同规格大小果蔬,旋转刀头设计易于实现剪断枝干,使用安全可靠。
