基于能效感知的无人机协助的视频数据传输
2021-03-21王钰宁刘晓霞胡云冰
王钰宁,刘晓霞,胡云冰
(1 四川水利职业技术学院信息工程系,四川崇州 611231;2 厦门大学信息学院,福建厦门 361005)
0 引言
由于移动便捷、部署灵活,无人机(unmanned aerial vehicle,UAV)通信已成为满足下一代蜂窝用户需求的有效技术[1-2]。UAV给空中和陆地的连接架上通信桥梁,已在多个领域中广泛使用,如地形测量等。这些应用要求通过UAV将视频数据传输到远端的陆地节点,进而实现对应用场景的监测。
目前,基于UAV的视频数据传输策略研究较多,文献[3]由收集数据的UAV(collected data-UAV,CD-UAV)直接向陆地节点传输视频数据。若由CD-UAV直接向陆地节点传输视频数据,CD-UAV的观察范围和通信区域受其存储的数据容量和能量限制。
然而,在多数场景,观察环境需要收集大面积区域的视频数据。因此,研究人员试图扩延CD-UAV的观察范围和通信区域[4-5]。一类方法是通过部署高性能天线扩延CD-UAV的通信区域。然而,在CD-UAV上安装高性能天线增加了部署成本,其不能在大型区域应用。另一方法是引用转发无人机(R-UAV)转发CD-UAV收集的视频数据扩延观察范围和通信区域。即不由CD-UAV直接向陆地节点传输数据,而是CD-UAV先将视频数据传输至UAV,再由UAV转发至陆地节点,如图1所示。将向陆地节点转发视频数据的节点称为R-UAV。为此,针对由R-UAV转发CD-UAV的视频数据的应用场景进行研究。
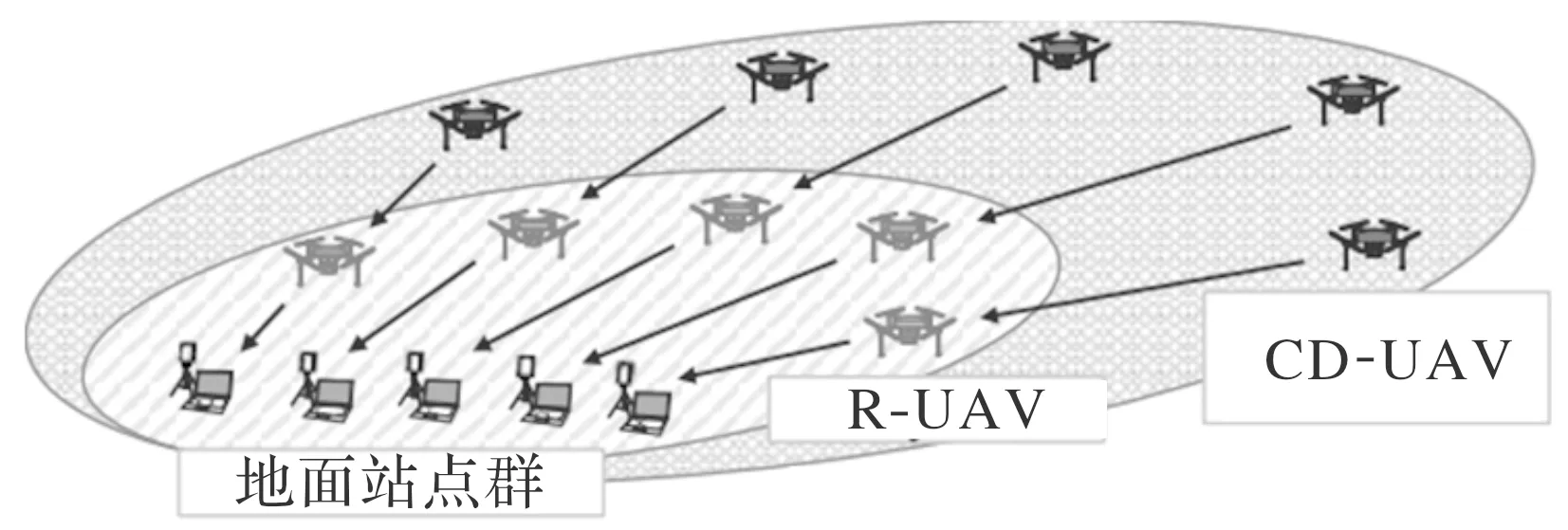
图1 基于R-UAV的视频数据传输应用场景
目前研究人员对基于R-UAV的视频数据传输策略进行了大量研究[6-8],但是它们只关注了数据吞吐量。然而,利用多个UAV传输视频数据存在多个问题。例如,当多个UAV同时传输数据,彼此就会干扰,最终导致数据丢失。
此外,部署UAV时也必须考虑UAV的能量问题。由于可存储的能量有限,UAV只能工作一段时间。为了有效解决这些问题,必须合理地、有效地使用UAV的能量,即提高能量利用效率(以下简称能效)。
文献[9-10]研究了基于R-UAV的视频数据传输系统的能效问题。然而,它们只关注了正在传输数据的CD-UAV和R-UAV的能效问题,忽略了由于它们传输数据而对周围UAV形成干扰的UAV,这些受干扰的UAV需要盘旋飞行等待,在等待期间需要消耗能量。为了表述简单,将受干扰的UAVs的盘旋飞行等待期间的能效简称为盘飞能效。
为了描述简单,将正在传输数据的UAV称为目标UAV(T-UAV)。T-UAV在传输数据时会对周围的UAV形成干扰,这些受干扰的UAV简称干扰UAV(I-UAV)。
为此,针对基于R-UAV转发的CD-UAV收集的视频数据的应用场景,研究I-UAV的盘飞能效问题,并提出基于功率控制和R-UAV位置优化的I-UAV的盘飞能效策略(TOEE)。TOEE策略考虑了T-UAV在传输数据时对周围UAV的干扰问题,并将I-UAV在等待空闲信道时所消耗的能量纳入总体能耗,这不同于文献[9-10]的研究工作。
1 系统模型
考虑如图2所示的网络模型。CD-UAV拍摄观察区域视频数据,并将视频数据通过R-UAV传输至陆地节点[8-9]。
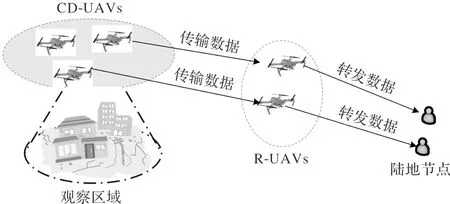
图2 网络模型
此外,为了减少R-UAV的转发数据时延,一旦接收到数据,R-UAV就向陆地节点转发。为了保证接收和转发数据同步,在CD-UAV与R-UAV间和R-UAV与陆地节点间采用不同的信道,因此,考虑到不同信道的拥塞情况,需对CD-UAV和R-UAV的传输功率和R-UAV位置进行优化。
2 TOEE策略
2.1 UAV飞行时的能效
相比于飞行时所消耗的能量,UAV在传输数据时所消耗的能量较小。因此,在最大化总体能量效率时,TOEE算法聚集于I-UAV的盘飞能效。
首先,一架旋转叶片无人机飞行1 s所消耗的飞行能量为[11]:
Phov=Po+Pi
(1)
式中:Po和Pi分别表示UAV在盘旋时的叶片轮廓功率和感应型功率。因此,T-UAV在传输数据时,干扰区域内I-UAV盘旋飞行时所消耗的能量为:
E=(ρ·A+1)Phovta
(2)
式中:A表示T-UAV在传输数据时所形成的干扰区域;ρ表示干扰区域内I-UAV的分布密度;ta表示干扰的时间,即T-UAV传输数据的时间。
依据式(2)所定义的能量,将能量利用效率(能效)X定义为:
(3)
式中:F表示数据尺寸。TOEE算法旨在通过控制传输功率和R-UAV的位置提高I-UAV的能效。
2.2 传输功率控制
传输功率是影响能效的一个重要因素。在保持通信质量的同时,当通信距离发生变化,传输功率也需随之调整。通信距离与传输功率间的关系式为:
(4)
式中:dmax表示最大的通信距离;Pt表示传输功率;Smin表示接收器的灵敏度;c表示光速;f表示频率。
当一个UAV在另一个UAV的通信范围内时,该UAV就需停止通信,避免形成干扰[12]。因此,将干扰范围的区域看成T-UAV的通信区域,并依式(5)计算A:
(5)
此外,由于T-UAV在传输数据,I-UAV经历干扰的时间等于T-UAV传输数据的时间。因此,依据式(6)计算干扰时间:
(6)
式中:ra表示传输速率,其定义如式(7)所示:
(7)
式中:B表示带宽;D表示通信距离;PI和PN分别表示干扰信号功率和噪声功率。
然而,若传输功率增加,I-UAV的数量就会增加,但它缩短了干扰时间ta。换言之,若减弱传输功率,尽管减少了干扰UAV数,但延长了干扰时间。因此,需在I-UAV的数量和干扰时间进行平衡。
因此,将式(2)代入式(3)可得:在T-UAV传输数据阶段,干扰区域内的I-UAV盘旋飞行时所消耗的能量为:
(8)
TOEE算法旨在通过优化传输功率,保证完成数据传输的同时,提高I-UAVs的能效。
2.3 R-UAV位置的优化
除了控制传输功率外,TOEE算法通过优化R-UAV位置提高I-UAV的能效:
(9)
式中:Etotal表示消耗总体能量。
Etotal=EOR+ERG
(10)
式中:EOR表示CD-UAV作为T-UAV时对邻近区域内的UAV造成干扰的UAV盘旋飞行时所消耗的能量,即I-UAV所消耗的能量;ERG表示R-UAV作为T-UAV时对邻近区域内的UAV造成干扰的UAV盘旋飞行时所消耗的能量[13]。由于R-UAV位于 CD-UAV与节点之间,它们间的距离满足:
DRG=DOG-DOR
(11)
因此,依据式(2),由CD-UAV造成的I-UAV所消耗的能量EOR为:
EOR=(ρ1A1+1)Phovta1
(12)
式中:ρ1表示I-UAV的分布密度;A1和ta1表示在信道1的干扰区域和干扰时间,它们的定义分别如式(13)和式(14)所示。
(13)
(14)
式中Pt,OR表示CD-UAV传输数据时的发射功率。
类似的,依据式(2),由R-UAV造成I-UAV的盘旋飞行时所消耗的能量ERA为:
ERA=(ρ2A2+1)Phovta2
(15)
式中:ρ2表示I-UAV的分布密度;A2和ta2表示在信道2的干扰区域和干扰时间,它们的定义分别为:
(16)
(17)
式中Pt,RG表示R-UAV传输数据时所消耗的功率。
对于每一个距离DOR,通过合理选择Pt,OR和Pt,RG可以使总能耗Etotal最小。
3 性能仿真
3.1 仿真环境
在Windows 7操作系统、core i7 CPU的PC上进行实验仿真。利用MATLAB软件建立仿真平台。考虑如图1所示的网络模型。UAV在2.4 GHz带宽上通信,依据通用的通信标准。带宽设置为20 MHz,具体仿真参数如表1所示。表1中设定了CD-UAV的分布密度和传输功率的取值范围。
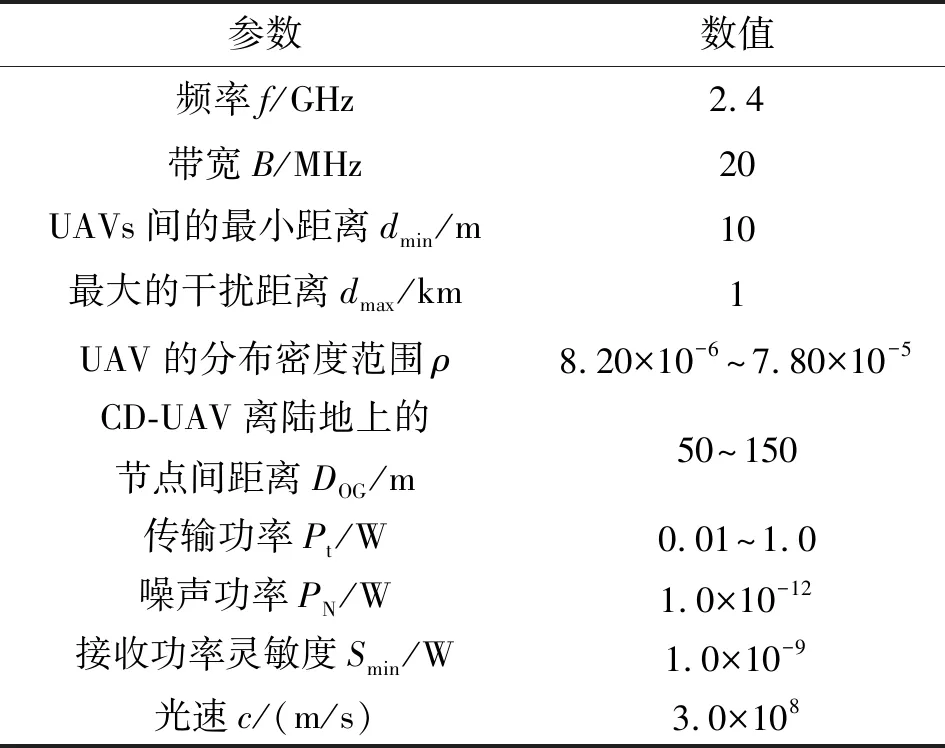
表1 仿真参数
此外,为了体现传输功率的调整和R-UAV位置优化对能效的影响,考虑4种情况:
1)对传输功率和R-UAV位置两者均进行调整,标记为TP+PU。
2)仅对传输功率进行调整,标记为OTP。
3)仅对R-UAV位置进行优化,标记为OPU。
4)既不对传输功率,也不对R-UAV位置进行调整,标记为U-TP-PU。
令ρCD表示由CD-UAV形成的干扰区域内I-UAV的分布密度;ρRG表示由R-UAV形成的干扰区域内I-UAV的分布密度,如图3所示。
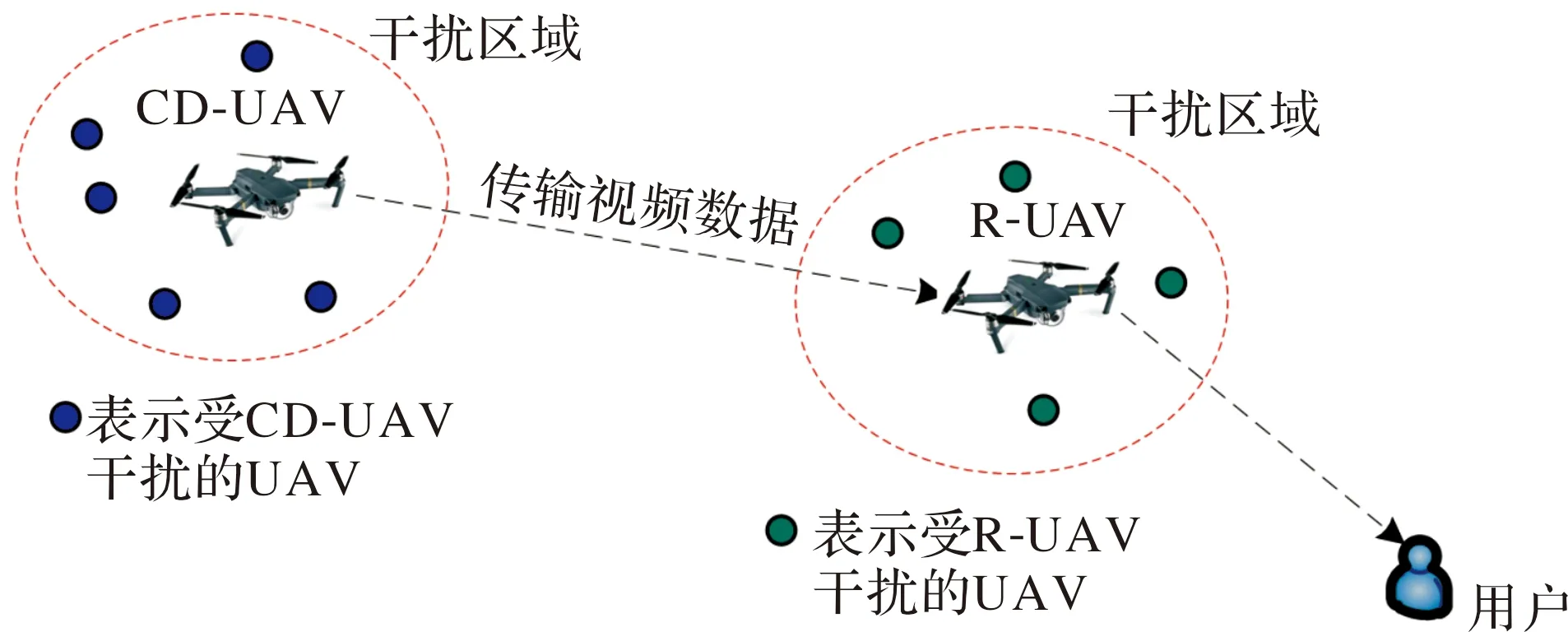
图3 ρCD和ρRG的示意图
在仿真中考虑3类场景:1)ρCD>ρRG;2)ρCD=ρRG;3)ρCD<ρRG。这3个场景下ρCD和ρRG的具体参数如表2所示。

表2 3个场景参数
3.2 能效
图4给出场景一I-UAV的盘飞能效随CD-UAV离节点间平均距离的变化情况。从图4可知,盘飞能效随平均距离的增加而下降。原因在于:CD-UAV与陆地节点间距离的下降,压缩了调整R-UAV传输功率和优化R-UAV位置的空间。
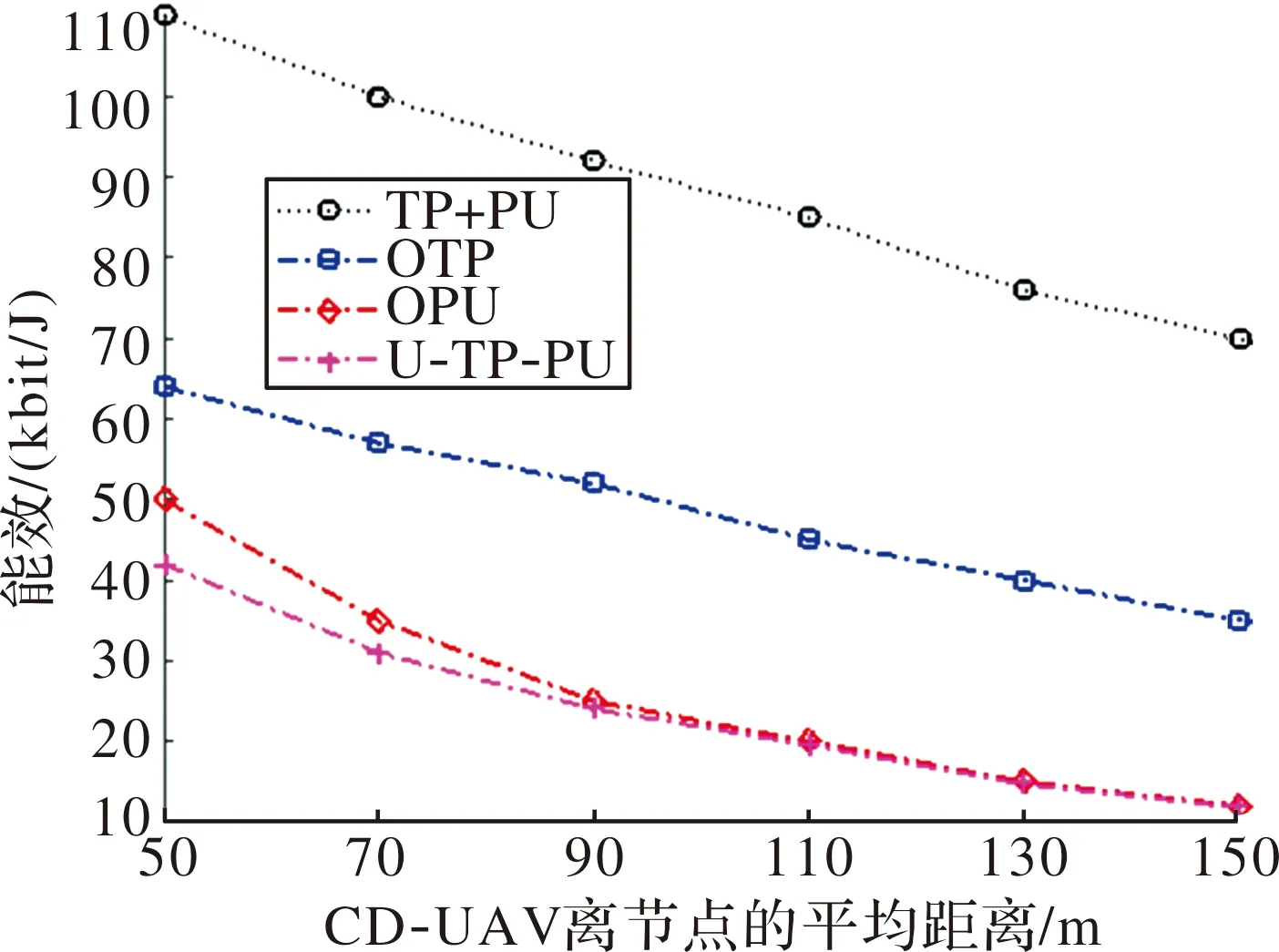
图4 I-UAV的盘飞能效(场景一)
此外,相比于U-TP-PU,OPU和OTP,TP+PU策略的能效随平均距离增加而下降速度更快。但是TP+PU策略的能效最高,这也说明,通过传输功率调整和R-UAV位置的优化,可以有效提高I-UAV的盘飞能效。
图5给出场景二能效随CD-UAV离节点间平均距离的变化情况。对比图4和图5不难发现,场景二的能效总体上高于场景一的能效。原因在于:在场景二,ρCD与ρRG相等,并且场景二中ρCD小于场景一中的ρCD。ρCD越小,干扰越小,传输功率就越小,越有利于能效的提升。
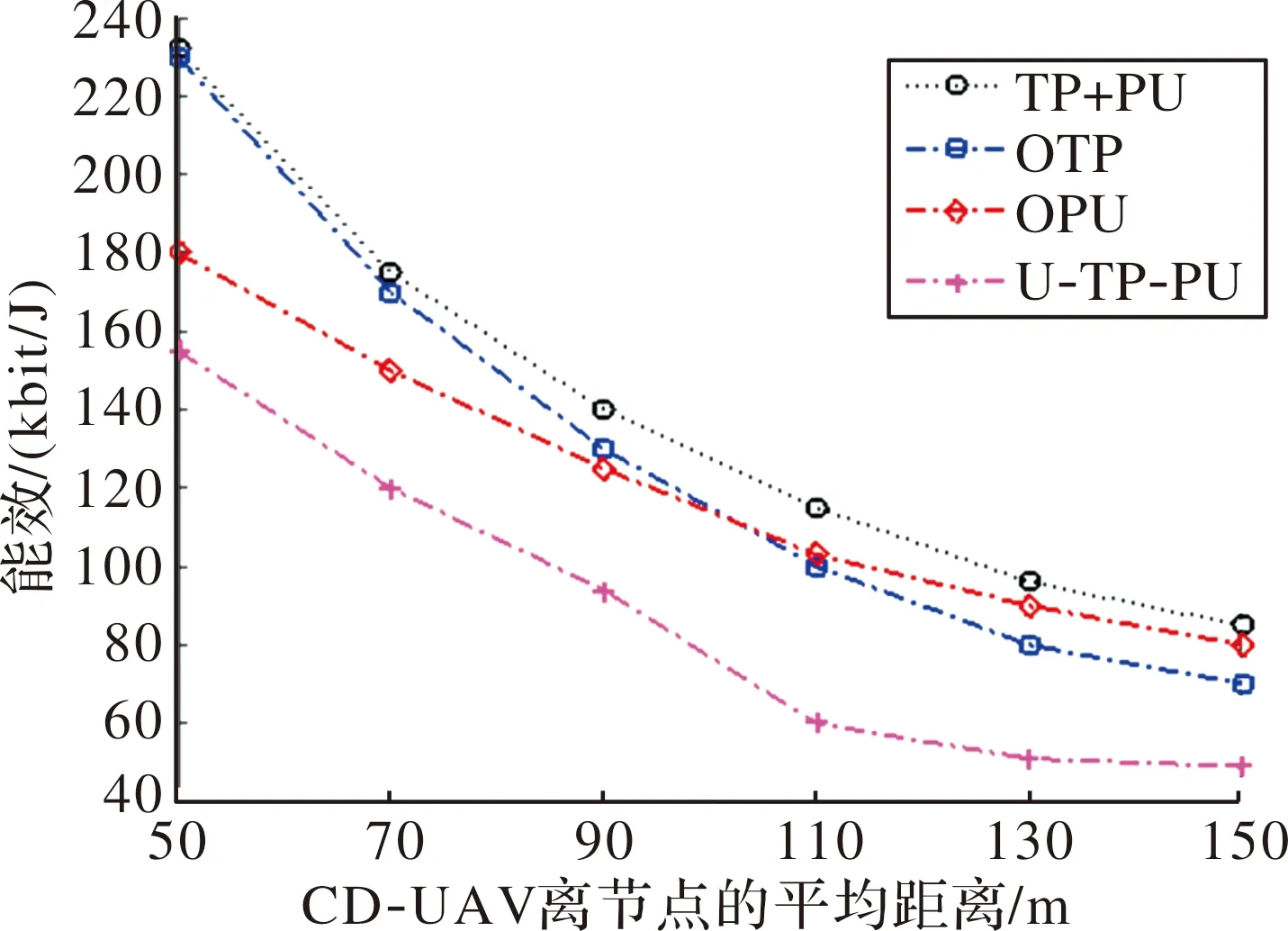
图5 I-UAV的盘飞能效(场景二)
最后,图6给出场景三的能效。对比图6和图5可以看出,图6的能效远大于图5。原因在于:场景三中ρCD比场景二的ρCD小,并且ρRG高于ρCD。
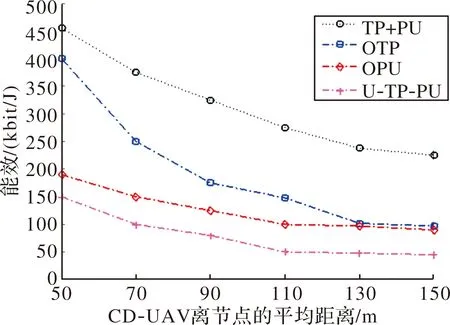
图6 I-UAV的盘飞能效(场景三)
上述数据表明,当ρCD较小,受干扰UAV的数量越少,I-UAV的能效得到提高。平均距离的增加不利于能效的提高。最初,平均距离的增加使I-UAV的能效快速下降,但当增加至130 m后,下降的速度变缓慢。
4 总结
面向UAV协助传输视频数据场景,提出基于功率控制和位置优化的I-UAV盘飞能效TOEE算法。TOEE算法通过控制传输功率和优化R-UAV位置两个手段提高I-UAV的盘飞能效。仿真数据表明,这两个手段均可以提高能效。但控制UAV传输功率提升能效更为显著。后期,将考虑大型的UAV网络,对多无人机系统的组网进行研究。
