多年生苜蓿地切根补播机低阻松土铲设计与试验
2021-03-20马文鹏王德成胡佳宁郇晓龙
马文鹏 尤 泳 王德成 胡佳宁 郇晓龙 祝 露
(1.中国农业大学工学院, 北京 100083; 2.石家庄鑫农机械有限公司, 石家庄 052460)
0 引言
中国苜蓿种植面积约1.33×106hm2,占全国人工草地面积的78.5%。随着商品经济的快速发展,国内市场对苜蓿的需求量仍在不断增加[1-3]。目前,制约苜蓿产业发展的因素主要有:①由于长期进行机械化收获作业,机具反复压实土壤,增大了土壤容重和坚实度、降低了土壤饱和导水率,打破了苜蓿根土系统的平衡状态,进而影响苜蓿生长[4]。②5年生苜蓿根系可超过7 m,在干旱胁迫下,苜蓿的根系和茎秆均生长缓慢,茎秆受到的影响较大,冗杂粗壮的根系影响地表茎叶的生长发育,从而影响苜蓿产量[5]。③长期单一化的种植模式导致多年生苜蓿地土壤肥力下降、生物多样性消失,使产量下降[6]。研究表明,对多年生苜蓿地进行机械化松土、切根、施肥以及补播禾本科牧草种子,可有效提高土壤含水率、增强土壤肥力、改善生物多样性,进而提高牧草产量[7-9]。松土、切根和开沟是苜蓿机械化改良作业的重要环节,其作业质量直接影响出苗率以及株高等指标。因此,提升切根松土部件的作业性能对于提高苜蓿地机械化改良效果具有重要意义。
目前,草地改良中多采用圆弧形深松铲或直立式深松铲进行松土作业,存在阻力大、能耗高、松土后形成的沟槽过大及地表不平等问题。因此,降低松土作业阻力和能耗、减小沟槽宽度、提高地表平整度是推广草地改良技术的关键[10-12]。常见的松土铲减阻方式有振动减阻和仿生减阻[13-16]。振动减阻是机具在前进的同时带动深松铲前后振动,以达到降低牵引阻力的目的,但驱动振动源需要消耗动力,故能耗增加,且土壤扰动量较大。仿生减阻是参考土壤洞穴生物的形态和体表特征,对松土铲的结构形状进行仿生优化,目前该方式已广泛应用于各类触土部件的减阻设计中[17-18]。
为解决苜蓿复式补播机松土铲水平阻力大、土壤扰动大等问题,本文利用逆向工程技术获取食蚁兽爪趾外表面三维点云,提取其侧剖面轮廓曲线,建立拟合曲线数学模型,设计仿食蚁兽爪趾曲线型松土铲柄。基于多年生人工苜蓿地的土壤物理特性,运用离散元法对松土铲柄水平阻力及土壤扰动情况进行仿真分析,探究其减阻机理。以水平阻力和土壤扰动宽度为试验指标,采用响应面分析法(RSM)建立铲翼结构参数与各指标之间的数学模型,利用粒子群优化算法(PSO)进行多目标寻优计算,获取最优结构参数组合,并进行大田验证试验。
1 整机结构与松土铲设计
1.1 整机结构与工作原理
基于多年生苜蓿地改良工艺要求,设计了一种多年生苜蓿地改良多用机械,其主要由气力式集排系统、自激振式切根松土铲以及智能电控系统组成,可一次性完成松土、切根、施肥、补播禾本科种子等作业,如图1所示。
工作时,整机由拖拉机牵引向前运动,双翼式切根松土铲对苜蓿行间土壤进行扰动,在进行松土作业提高土壤透气性的同时,可有效切断苜蓿根茎,促进苜蓿地表茎叶的生长;两套气力式集排系统,可实现禾本科牧草种子的套种以及侧深位施肥,合理提高地上空间利用率,使根系发育达到最佳状态,进而提高牧草年总产量;由旋转编码器和PLC等组成的智能电控系统,可对种子和肥料的排量进行实时调控,保证其精确性和均匀性。
1.2 仿食蚁兽爪趾的低阻切根松土铲设计
食蚁兽极善于挖土,掘进速度快,通过观察发现,其在挖掘土壤过程中,爪趾的运动方式同松土铲相似,即以水平运动为主,通过爪趾的移动切碎土壤。因此,以食蚁兽爪趾作为研究对象,将其轮廓特征应用于松土铲铲柄的结构优化设计中。
为精准拟合食蚁兽爪趾特征,基于逆向工程理论[19],利用Reeyee 5M型蓝光3D扫描仪对食蚁兽爪趾进行扫描。在扫描创建网格阶段,对获取的点云数据一次性进行采样、平滑和杂点消除处理,使得点云得到优化进而得到更高质量的点云数据[11],对建云模型进行封装和填孔得到食蚁兽爪趾三维模型,如图2所示。
为确定食蚁兽爪趾内外侧结构参数,采用计算机视觉技术提取爪趾模型截面外缘轮廓[20]。基于Matlab 软件设计了计算机程序,用于提取外缘轮廓的二维点云,总体步骤为:获取食蚁兽爪趾模型截面数字图像,将数字图像做噪点降低和干扰减小的处理,然后设定阈值并检测爪趾外缘轮廓点,最后将各点的x和y坐标数据储存到计算机数据库,进行曲线拟合,为了观察拟合曲线在不同位置处与原始点云的误差,对所拟合的曲线进行残差分析,结果如图3和图4所示,从分段曲线拟合方程中可以看出,模型决定系数R2均大于0.99,拟合度极高。
基于食蚁兽爪趾轮廓内外侧曲线数学模型,建立仿生深松铲柄三维模型,并进行等比放大,为保证其工作适应性,根据苜蓿根茎生长特性以及标准轻型深松铲柄参数[21],设置放大倍数为4倍,松土铲总体高度为500 mm,铲尖入土角为20°,铲柄宽度为18 mm。切根松土铲主要由仿生松土铲柄、铲尖以及铲翼组成,如图5所示。其中仿生松土铲柄和铲尖主要完成松土、开沟作业,铲翼主要完成横向切根作业。
2 仿真试验
利用EDEM软件建立触土部件-土壤相互作用离散元模型,以水平阻力和土壤扰动面积为主要评价指标,在不同作业条件下对无翼仿生松土铲和轻型标准深松铲工作过程进行数值模拟,旨在进一步探究仿生松土铲减阻机理,验证基于食蚁兽爪趾的仿生设计科学性。
2.1 离散元模型建立
多年生人工苜蓿地土壤为沙壤土,考虑颗粒间水分对土颗粒流动特性的影响,将线性内聚力模型(Liner cohesion model,LCM)整合到延迟弹性模型(Hysteretic spring contact model,HSCM)中作为土壤颗粒之间的接触模型,土壤于松土铲之间的接触模型设定为Hert-Mindlin(no slip)模型[22]。通过筛分法得出75%的土壤颗粒尺寸介于0.25~5 mm,其余25%小于等于0.25 mm,为将仿真时间控制在一个合理的范围内,将土壤颗粒模型设置成粒径2.5 mm的球形颗粒,土壤颗粒尺寸分布为0.5~1.5倍。利用蜡封法测量土壤密度为2 500 kg/m3。此外,通过文献[23-25]可知,土壤颗粒泊松比为0.3,土壤剪切模量为1 MPa,土壤颗粒阻尼系数为0.95,土壤颗粒刚度系数为0.05,松土铲材料泊松比为0.3,松土铲材料密度为7 865 kg/m3,松土铲材料剪切模量为7.9×1010Pa,土壤-深松铲间碰撞恢复系数0.3,土壤-深松铲间动摩擦因数0.05,土壤-深松铲间静摩擦因数0.5。
由于长期的机具压实作业,多年生人工苜蓿地的耕作层下存在一层紧实的犁底层,因此需将土槽模型设置为3层,即耕作层、犁底层和心土层。经试验测得耕作层、犁底层和心土层土壤颗粒实际堆积角分别为36.58°、41.13°和35.29°。土壤颗粒间的微观接触参数不易获取,因此为确保数值模拟准确性,以土壤颗粒间静摩擦因数、土壤颗粒间滚动摩擦因数和颗粒间粘聚能量密度为试验因素,以土壤模拟堆积角为试验指标,进行3组三因素四水平正交模拟试验,分别对3层土壤颗粒模型参数进行标定。以耕作层土壤颗粒模型参数标定过程为例,其试验因素水平如表1所示,各因素上下限水平由前期大量单因素试验确定。分别在不同参数组合条件下建立土壤颗粒接触模型,设置时间步长为 1×10-5s,在一个圆柱体内生成土壤颗粒,完毕后撤掉圆柱体,让颗粒自然下落堆积形成土堆,如图6所示。为减少人为测量导致的误差,利用 Matlab 软件对采集到的堆积角图像依次进行去噪处理、灰度处理以及二值化处理,获取土堆边界点,其连线即种堆边界曲线,最后采用最小二乘法对曲线进行拟合,得到一条直线,直线的斜率即土壤颗粒的模拟堆积角,如图7所示,每组试验重复5次取平均值测量并记录堆积角,结果如表2所示,表中A、B、C为因素水平值。对试验结果进行方差分析,如表3所示,可知各试验因素对模拟堆积角均有显著影响。根据表2中的极差分析结果,确定A3B3C4为最优组合,即颗粒间摩擦因数0.35,颗粒间滚动摩擦因数0.18,颗粒间粘聚能量密度6 654 J/cm3,在此条件下模拟堆积角为36.17°,与实际堆积角之间误差为1.12%,满足数值模拟精度要求。犁底层和心土层土壤颗粒模型参数标定方法与耕作层相同,最终标定结果如表4所示。

表1 试验因素与水平Tab.1 Experimental factors and levels

表2 试验方案与结果Tab.2 Test design scheme and results

表3 试验方差分析Tab.3 Variance analysis of test
经测量,土壤耕作层厚度在150 mm左右,犁底层平均厚度约为120 mm,基于土壤颗粒模型本征及接触参数,建立700 mm×400 mm×350 mm虚拟土槽,土壤颗粒总数量为916 402个。将无翼松土铲几何模型导入EDEM中,松土铲-土壤相互作用模型如图8所示。为便于观测松土铲对土层扰动的影响情况,在土槽模型中每隔25 mm设置一层厚度为5 mm的标示层,共11层,分别为h1~h11,其中h1~h5位于耕作层,h6~h9位于犁底层,h10和h11位于心土层,如图9所示。
2.2 仿真结果及分析
为检验仿生铲减阻效果,利用松土铲-土壤相互作用模型,分别对仿生铲柄和轻型国标深松铲柄的耕作过程进行数值模拟。设置深松铲作业速度为0.83、1.39 m/s,耕深250、320 mm。松土铲水平阻力曲线如图10所示。
由图10可知,仿生松土铲柄水平阻力仿真值整体上小于轻型标准深松铲。随着松土铲从右侧进入土槽模型,其水平阻力从0开始逐渐增大,计算松土铲完全入土后的水平阻力平均值,结果如表5所示。4种作业条件下,仿生铲减阻率分别为7.51%、7.36%、6.91%和6.67%。

表5 仿生松土铲与轻型标准深松铲水平阻力仿真结果Tab.5 Simulation results of tillage resistance of bionic soil shovel and light soil shovel
为探究两种松土铲作业时土壤颗粒的运动特性,对耕深320 mm、作业速度1.39 m/s条件下的仿真结果进行对比分析,图11为0.4 s时土壤运动速度大小及方向分布状态。由图11a、11c可知,相较于标准深松铲,仿生松土铲作业时对土壤颗粒的冲击较小(图11a中红色颗粒较少),其中耕作层和心土层对比较为明显,这是由于仿生铲特殊的曲线结构使其运动方向仅能在极小范围内与铲柄刃口垂直,使刃口处于垂直砍切状态,而其余大部分刃口与水平方向夹角小于90°,使其对土壤起到滑切作用,有效减小了土壤运动速度和水平阻力。由图11b、11d可知,标准铲作业时,犁底层、心土层土壤颗粒沿铲柄铲尖垂直方向运动,耕作层土壤在下层土壤抬升以及铲柄垂直段的切削、挤压作用下向前、向上运动;仿生松土铲作业时,在铲柄的下压作用下,耕作层土壤颗粒向前、向下运动,铲柄起垄高度较低,不仅降低了耕作层、犁底层和心土层土壤的混合量,达到了不扰乱土层的效果,还减小了一部分由于土壤堆积引起的水平阻力。
为探究两种松土铲作业时的土壤扰动情况,对耕深320 mm、作业速度1.39 m/s条件下的仿真结果进行对比分析,图12为松土铲作业后标示层土壤颗粒分布情况。由图可知,在相同的作业条件下,标准深松铲作业后土壤扰动面积和沟槽宽度大于仿生松土铲。在心土层和犁底层(-330~-150 mm),仿生铲和标准铲对土壤扰动影响基本相同,但在耕作层(-150~0 mm),标准铲作业后的土壤提升高度和土壤扰动量明显大于仿生铲。因此仿生铲具有较好的低扰动特性,有利于保水保墒。
3 田间试验
为验证仿生松土铲减阻效果以及松土铲-土壤离散元模型准确性,以松土铲水平阻力为评价指标,于2020年6月在河北省石家庄市北苏村农田进行试验。试验地土壤为沙壤土,含水率为12.3%,坚实度为45.9 kg/cm2。试验装置主要由机架、地轮、松土铲以及测力系统组成,拉力传感器型号为DYLY-101,量程50 kN,如图13所示。试验装置前进速度和耕深同仿真试验相同,拉力传感器采样频率10 Hz,待工作稳定后采集数据,结果如图14所示。
由于松土铲在草地土层中移动作业时,受到来自土层的水平方向作用力并不是均布力,会随着松土铲的形状和作业深度变化,因此为便于比较不同松土铲在作业时受到的阻力情况,试验过程中以采集传感器受力的方式来对不同松土铲作业过程中的受力情况进行分析,通过比较传感器的受力情况来间接反映松土铲在土层中作业过程中受力情况[26],不同工作条件下传感器拉力测量值(平均水平阻力)见表6。由表6可知, 4 种条件下,与轻型标准深松铲相比无翼式仿生松土铲的水平阻力分别降低8.11%、7.80%、7.33%和7.31%。结果表明,基于食蚁兽爪趾的仿生松土铲具有减阻的效果,平均减阻7.64%。田间试验测得的仿生铲减阻率与仿真试验结果相比,误差小于9%,如表6所示。
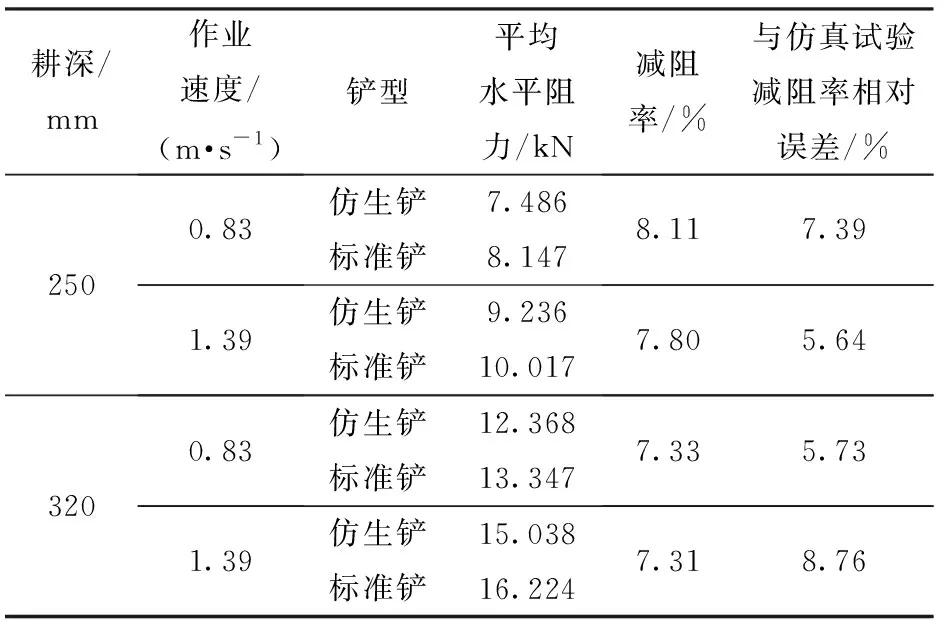
表6 仿生松土铲与轻型深松铲水平阻力田间试验结果Tab.6 Field test results of tillage resistance of bionic soil shovel and light soil shovel
为进一步研究仿生松土铲和轻型标准深松铲在进行松土开沟作业时对草地土层的扰动情况,设计并制作了草地土层扰动截面轮廓测定装置,垂直方向测量范围为-200~200 mm,水平方向测量范围为-250~250 mm,如图15所示。通过该装置测定松土铲作业后草地地上和地下的扰动轮廓坐标参数,基于坐标参数绘制扰动截面轮廓,并计算土壤垄起面积,如图16所示。在不同作业速度和耕深条件下测定两种松土铲的土壤垄起面积,每组试验重复3次取平均值。结果表明,仿生松土铲和轻型标准深松铲的土壤垄起面积为6 874.5、8 653.9 mm2,仿生松土铲扰动量比标准铲减少20.26%。
4 松土铲铲翼结构参数优化
铲翼倾角α和铲翼开角β对切根松土铲水平阻力及土壤扰动性影响显著[11],为提高切根松土铲工作性能,通过松土铲田间实际作业试验建立铲翼各结构参数影响松土性能的数学模型[27],并利用粒子群优化(PSO)算法对模型进行求解计算,以获取最优结构参数组合。
制作不同结构参数的双翼式仿生松土铲,分别安装于图17中的试验装置上进行田间松土试验,记录传感器拉力测量值以及松土铲作业后的沟槽宽度。在耕作深度250 mm、作业速度0.83 m/s的条件下,以铲翼倾角α和铲翼开角β为试验因素,以传感器拉力测量值Y1和沟槽宽度Y2为试验指标,进行二因素五水平旋转正交组合试验,试验因素编码如表7所示,试验方案与试验结果如表8所示。

表7 田间试验因素编码Tab.7 Field test factors and codes
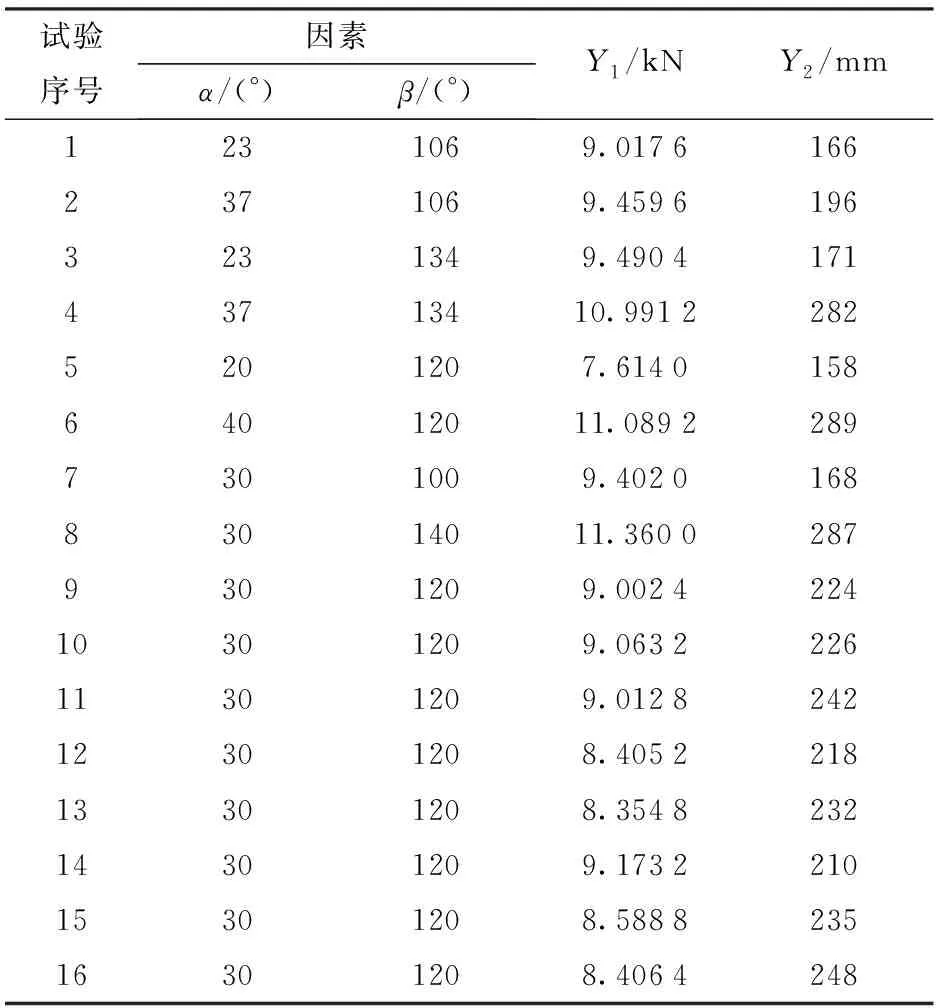
表8 试验方案与结果Tab.8 Test scheme and results
通过试验以及对试验数据进行多元回归拟合,得到各因素对传感器拉力测量值和沟槽宽度影响的回归模型
Y1=71.488 70-0.531 51α-0.985 72β+
2.701 02×10-3αβ+5.491 52×10-3α2+
3.946 38×10-3β2
(1)
Y2=-84.025 68-8.990 97α+3.712 29β+
0.206 63αβ-0.166 74α2-0.031 685β2
(2)
铲翼开角、铲翼倾角对传感器拉力测量值和沟槽宽度影响的响应曲面如图18所示。由图18a可知,当铲翼倾角一定时,随着铲翼开角的增大,传感器拉力测量值先减小后增大;当铲翼开角一定时,随着铲翼倾角的增大,传感器拉力测量值增大。由图18b可知,当铲翼倾角一定时,随着铲翼开角的增大,沟槽宽度增大;当铲翼开角一定时,随着铲翼倾角的增大,沟槽宽度增大。
本文以传感器拉力测量值最小和沟槽宽度最小为优化目标,以铲翼开角和铲翼倾角为优化对象进行研究。在正交试验的基础上,确定铲翼倾角范围为20°~40°,铲翼开角范围为100°~140°。因此,优化的目标函数和约束函数为
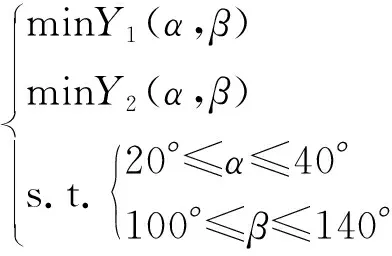
(3)
用PSO算法[28-29]求解优化模型得到的帕累托解集如图19所示。横坐标表示Y1,纵坐标表示Y2。在兼顾传感器拉力测量值和沟槽宽度的原则下,选取传感器拉力测量值为8.679 kN,沟槽宽度为144.2 mm,此时铲翼倾角为20°,铲翼开角为105.6°。
为验证粒子群优化算法的准确性,在耕作深度250 mm、作业速度0.83 m/s、铲翼倾角20°、铲翼开角105.6°的条件下,进行仿生切根松土铲田间作业试验。结果表明,传感器拉力测量值为9.086 kN,沟槽宽度为152.7 mm,与预测值相对误差分别为4.48%和5.57%,基于RSM和PSO的多目标参数优化方法具有科学性和可行性。
5 结论
(1)基于逆向工程技术建立了食蚁兽爪趾三维模型。采用计算机视觉技术提取爪趾模型截面外缘轮廓,并进行曲线拟合,对其进行残差分析,结果表明,爪趾轮廓曲线模型决定系数R2大于0.99,拟合度极高。
(2)利用EDEM软件建立了触土部件-土壤相互作用离散元模型,对无翼仿生松土铲和轻型标准深松铲工作过程进行数值模拟,并进行大田验证试验。结果表明,仿生铲平均减阻率为7.64%,仿真值与实测值误差小于9%,所建立的离散元模型精准性较高。仿生松土铲扰动量比标准铲减少20.26%。
(3)以铲翼倾角和铲翼开角为试验因素,以传感器拉力测量值和沟槽宽度为试验指标,进行二因素五水平旋转正交组合试验,建立了因素与指标之间的回归数学模型。以传感器拉力测量值最小和沟槽宽度最小为优化目标,以铲翼倾角和铲翼开角为优化对象,采用PSO算法获取Pareto最优解集,选取传感器拉力测量值为8.679 kN,沟槽宽度为144.2 mm,此时铲翼倾角为20°,铲翼开角为105.6°。
(4)在铲翼倾角为20°及铲翼开角为105.6°的条件下,进行仿生切根松土铲田间作业试验。结果表明,传感器拉力测量值为9.086 kN,沟槽宽度为152.7 mm,与预测值相对误差分别为4.48%和5.57%,说明基于RSM和PSO的多目标参数优化方法具有科学性和可行性。
