复杂环境下无人机结构设计与姿态分析
2021-03-19谢兵梁孝林祁宇明肖帅
谢兵,梁孝林,祁宇明,肖帅
(1.天津职业技术师范大学 机器人及智能装备研究院,天津300222;2.十堰市高级技工学校,湖北 十堰442000)
0 引言
无人机是通过机体内装备的自主程序来控制飞行或根据地面控制站无线遥控设备的操作指令控制飞行[1-2]。旋翼飞行器因为其具备垂直起降、空中悬停等优势,以及可搭载侦查设备、实现多目标的监测与追踪,成为国内外研究的热点。亚利桑那州大学[3]提出的MATE四轴无人机,具有高精度速率的数据算法能力,保证独立、编队飞行的高机动性;柏林洪堡大学[4]研发的黑锋无人机,在轻量化原则下保证了较高强度;大疆创新科技有限公司[5]的精灵系列无人机广泛应用于航空拍摄、森林防火预警、电力线路巡视、人员搜救等;上海交通大学[6]的倾转旋翼机将固定翼与旋翼完美结合,实现其独特的优势。为解决复杂环境对无人机的影响,国内外学者分别从无人机机械结构与控制算法改进方面进行相关研究,取得一定的研究成果。由于六旋翼无人机存在飞行时间短、抗风性差、研究难度相对较大等,因此针对六旋翼无人机的研究相对较少。六旋翼无人机系统的结构及飞行姿态控制算法的研究,对提高飞机的飞行性能和飞行质量具有重要意义。
1多旋翼无人机结构设计与分析
1.1 无人机整体结构
多旋翼无人机的主要组成部分包括升降系统、机体本身、动力装置、航电设备。其中电动机与旋翼构成升降系统;机体本身包括力臂、机身上下板;动力装置主要有减速机构带动旋叶联动、用电调驱动无刷电动机带动桨叶、用MOS管驱动桨叶3种[7]。
在多旋翼无人机结构设计中须满足:轻量化、较高负载、便于安装、拆卸与携带等。其中多旋翼无人机总体性能指标参数如表1所示。
本文在选取碳纤维材料作为无人机整体材料的基础上, 利用SolidWorks进行多旋翼无人机三维模型的建模,如图1所示。
1.2 无人机结构静力学分析
为保证在复杂环境下无人机结构的可靠性,利用ANSYS Workbench进行无人机仿真分析。仿真步骤如图2所示。
根据图2(c)、图2(d)可知:多旋翼无人机机身结构最大形变量为0.1584 mm,最大等效应力为1.0589 MPa。

表1 无人机总体性能指标参数

图1 无人机整体结构建模
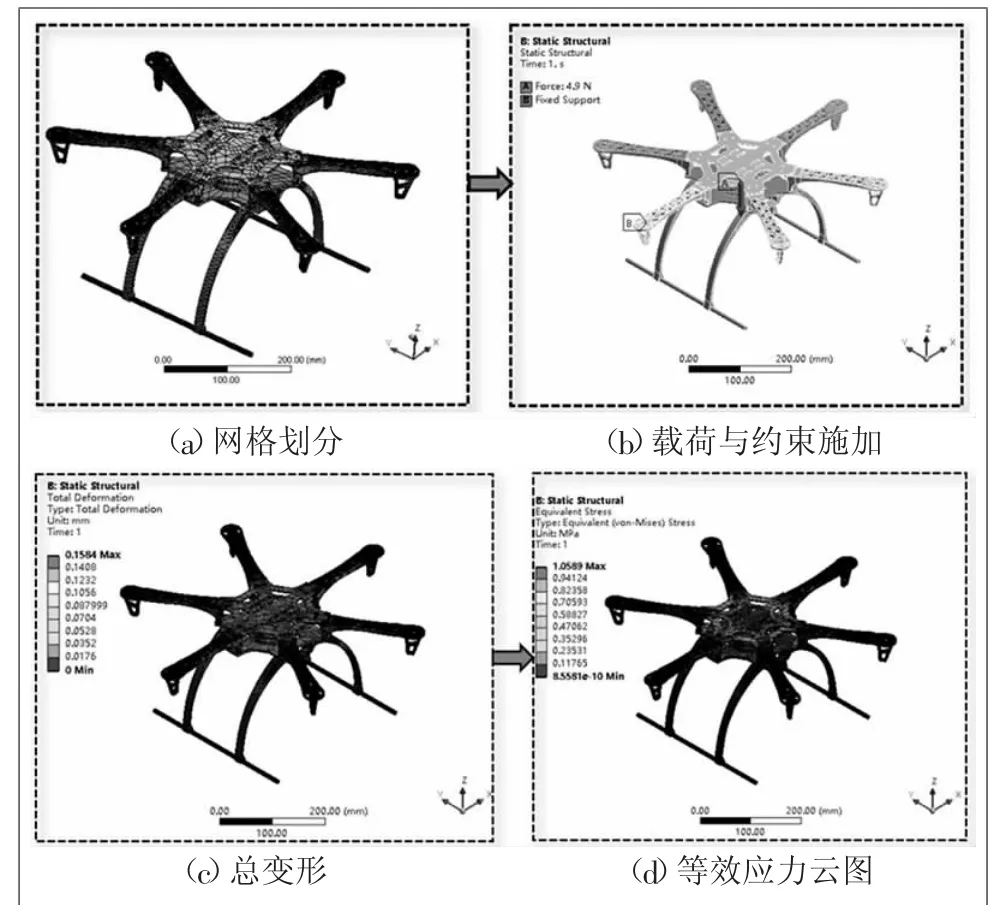
图2 无人机仿真步骤

图3 无人机模态振型
1.3 无人机结构模态分析
为避免旋翼转动而引发机身共振现象,对机身结构的振动响应进行模态分析。为保证研究的科学性,采用自由模态分析研究无人机机身第7~9阶模态。无人机模态振型如图3所示。
根据图3(a)可知,在第7 阶模态下,无人机整机振动,并呈现某方向拉伸趋势,最大形变量达到95.948 mm;由图3(b)可知,在第8阶模态下,无人机整机振动,并呈现某方向拉伸趋势,最大形变量达到102.09 mm;由图3(c)可知,在第9阶模态下,无人机局部振动,起落架弯曲变形严重,最大形变量达到236.86 mm。
查阅文献[8]及计算可得:旋翼激振频率大于等于178.29 Hz,远远大于本文中触发无人机机身共振的基本要求,因此不会发生共振现象。
根据静力学分析及无人机结构模态分析可知,本文所设计的多旋翼无人机符合无人机机身结构设计要求。
2 无人机姿态控制系统设计
无人机姿态控制系统利用陀螺仪、加速度计、磁力计结合PID控制算法实现无人机飞行姿态的控制与调节。其中无人机姿态控制系统实现如图4所示。

图4 姿态控制实现
无人机姿态控制中,需要进行姿态解算。首先,利用陀螺仪、加速度计和磁力计采集无人机飞行过程中的角速度值、加速度值和磁力值。然后,对加速度进行滑动平均滤波得出误差值,并反馈至漂移校正后的角速度值;最后,根据欧拉角转化公式实现无人机姿态的控制。其中无人机姿态解算流程图如图5所示。
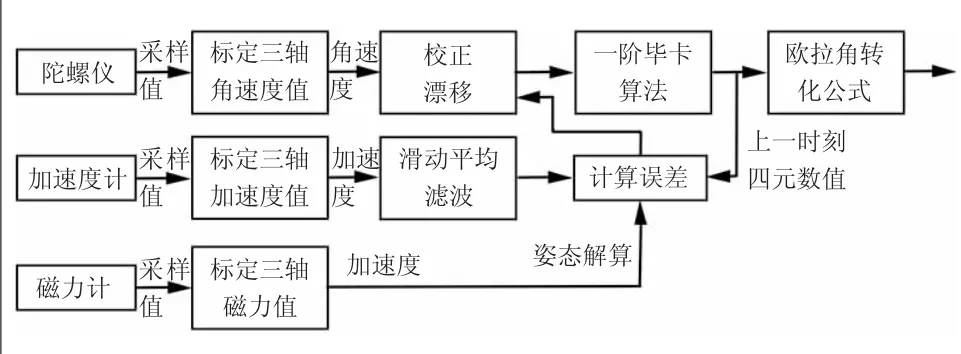
图5 无人机姿态解算流程图
3 多旋翼无人机悬停试验
在室外复杂环境下进行多旋翼无人机悬停试验,如图6所示。通过监测无人机俯仰角、横滚角和偏航角的数值的变化状态,验证无人机飞行的稳定性与可靠性。其中实验结果如图7 所示。

图6 值班无人机飞行试验图
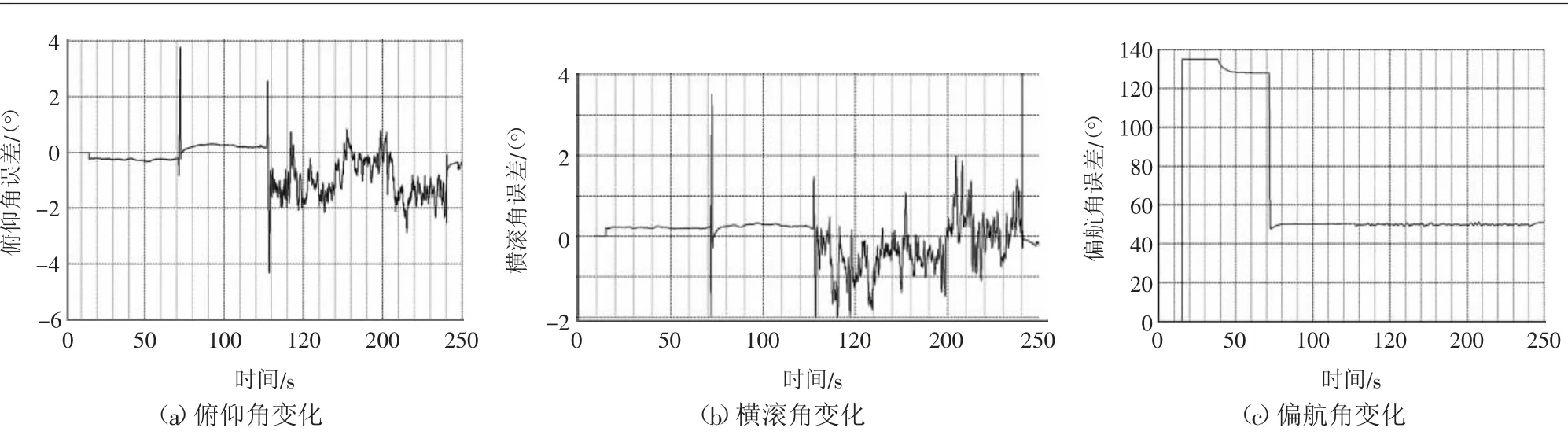
图7 试验结果图
4 结论
试验结果表明,无人机各个通道能够较好完成相应各项指令,可安全平稳实现无人机的遥控升降、自主悬停,俯仰通道、滚转通道和偏航通道均能较好实现相应动作,俯仰角、滚转角误差(±2°)在允许范围可被接受。整体飞行稳定,基本上达到预期试验要求。
