中高放管道探测机器人的设计
2021-03-19黄少荣
黄少荣
(中核四O 四有限公司第四分公司)
核工业是高科技战略产业,是国家安全的重要基石。 随着核能开发利用的持续发展、核安全要求的日益提高和工业智能技术应用的广泛拓展, 近年来利用智能机器人替代人力完成高辐射、高危险性作业的案例已屡见不鲜,中高放核辐射环境下智能作业机器人的研发也已成为工业自动化研究的热点。
为核动力反应堆供应燃料和其后的所有处理、处置过程的不同生产阶段,均存在中高放射性工艺管沟检修的作业需求, 尤其是化学转化、同位素浓缩、核燃料后处理、废物处理和处置等核工业厂房。 中高放工艺管道内部一般存有高放射性废液, 含有高剂量的放射性物料和气溶胶,依靠人工进行管沟内部泄漏点巡检、放射性剂量率水平探测、 热点定位和核素分析的难度极大,且对操作人员有较强的辐射伤害。 目前国外的先进核能国家,如英、法、美、俄等国均已开发了环境适应能力、作业技术能力较强的辐射环境作业机器人,用来从事堆内检测、水下焊接及退役处置等高风险作业,但受限于国外技术封锁和核心产品的贸易限制,尚不能通过国外引进来保证国内生产的需要[1]。
鉴于此,笔者针对核工业中高放射性工艺管道的机构特点和内部环境,结合管道应急检修和处置准备的需要,设计研制了耐辐照、高通过能力且运行平稳的轮式管道探测机器人。
1 工况分析
中高放管道, 一般为含中高放射性水平固体、液体物料流转的通道。 管道内壁较为光滑平坦,1%坡度,材料为不锈钢,内部无光源。 管道投运后,因接触具有腐蚀性的高放射性废液,长时间输送会对管道造成腐蚀,管道焊缝处存在泄漏的可能性。 此外根据经验反馈,高放射性冲渣水在管道长时间使用, 会使管道发生堵塞的情况。若在生产运行过程中发生上述情况,会影响核燃料生产厂的正常运行,需要及时对高放管道进行检修。 如果依靠人员进入检修,需要大面积打开管道活动盖板,产生大量放射性污染扩散;人员需对管道逐步排查, 增大了人员受辐照剂量,耗费成本较高。
综合机器人运行工况分析,设计研制的管道探测机器人, 须适用管道内部复杂的工况环境,且具备以下功能:
a. 主要任务。 在管道中进行巡检,检测管道不同位置放射性剂量率水平,同时对热点进行定位和核素分析。
b. 类型。移动式机器人,具体底盘运动模式,可根据现场环境需要进行设计。
c. 通信方式。 不限制有线或无线方式通信,但需要满足可靠通信的需求。
d. 辅助功能。 实时照明;前方障碍物轮廓探测及未知环境地图构建;全景摄像导航。
2 系统设计
2.1 系统结构
探测机器人工作环境为管道,内壁为钢敷面方式,从运行环境看属于典型的结构化管道机器人范畴。 该运行环境地面较为平坦,无明显起伏同时转弯半径较大,不存在90°直角弯,因此对于机器人运行相对比较有利; 管道内障碍物较多、空间狭小,需要机器人具有很高的灵活性,具备原地转向能力,体积小巧;因执行探测任务需要,机器人应具有相当的负载能力以携带相关装置抵近进行探测;另考虑去污需要,机器人应采用相对易于去污的结构设计便于反复进行探测任务后去污或封闭暂存。
传统的移动式机器人平台主要分为履带式和轮式平台。 履带式平台具备较强的承载能力和原地转向的高机动性,适合在崎岖、松软的环境下运行,但其缺点为功耗大、易沾污、难以去污、寿命较短;轮式平台多具有转向机构,机动性不如履带式平台,但功耗小,也更易于去污,但其转向必须伴随较大的前向位移,在狭窄、拥挤的环境内作业机动性往往难以满足要求[2,3]。
综合环境对于平台的要求,机器人采用麦克纳姆全向轮结构[4]。该结构区别于传统轮式平台,主要在于使用了麦克纳姆轮,该轮在垂直于轴线45°的角度上均布了若干纺锤体子轮,且外轮廓保持圆形,其结构如图1 所示。

图1 麦克纳姆全向轮结构
轮毂采用高强度铝合金制作,确保强度的前提下降低重量, 纺锤体子轮采用导电橡胶材料,确保有足够摩擦力的前提下避免产生静电从而吸附灰尘造成难以去污。
当四轮以特定方向和速度运行时, 由于其45°倾斜轴设计,使它可以通过对正交速度分量的合成向平面内任意方向运动或转动,从而具备了全向运动的能力, 是机动性最高的一种底盘结构,其具体工作原理如图2 所示。

图2 麦克纳姆轮工作原理
平台的运动方向取决于四轮速度的合成,这就要求对每个轮的速度和扭矩具备精确控制的能力。 传统的全向平台多见于教学、机器人竞赛等低强度场合,高强度、高负载能力、高可靠性的全向平台并不多见。 同时为满足核工业特殊的技术需求,还需要对设计进行一系列定制。
整车采用四麦克纳姆轮设计,相对常见的三轮设计可以提高承载能力。 四轮排布呈前后两轴平行排布,如图3 所示。
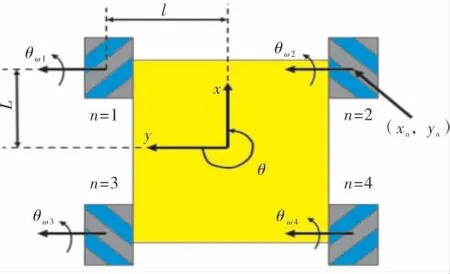
图3 四麦克纳姆轮布置示意图
四轮采用独立伺服电机控制,可以精确地控制每个轮的转速和转矩, 从而使车体运行精确、平稳。
为了提高车体的承载能力,采用一体式车身设计,使用车体主框架承受重力,相对传统的框架式车身刚度更高, 更容易实现防水等防护功能。 伺服电机拟采用空心杯无刷电机,该类型电机具有调速特性优异、功率密度高、过载能力强和效率高的优点, 广泛应用于各种机器人系统中。
同时区别于传统机器人系统采用轴输出式行星减速器的方式,笔者创新使用法兰输出式行星减速器,其优势在于:由于四轮需要承受车体重量,会产生很大的弯矩,轴输出式减速器抗弯矩能力较差,同时会增加结构宽度,降低灵活性。法兰输出式减速机具有结构紧凑、体积较小的优势,同时抗弯矩能力更强,比较适合涉核环境下大负载机器人的应用。 两种行星减速器的结构如图4 所示。

图4 两种行星减速器结构对比
由于设计的车体结构整体上为轴对称且中心对称结构,所有设备安放必须考虑重心和几何中心的重合, 故将舱体中部安放主控电路板,外围布置电源系统。
2.2 功能模块配置
根据功能需求、机器人设计等多方面因素考虑, 探测机器人携带伽马相机等多种探测器,可以获得管沟内多种环境信息从而对是否发生事故、事故类型、事故故障点进行初步判断。
2.2.1 核素探测
探测机器人携带多种核探测器,典型的如伽马相机、G-M 管等设备, 以快速对环境信息进行检测,待检修作业或应急处置时实现对热点或核素种类的源项调查。
伽马相机是一种可探测辐射热点具体位置、强度甚至核素种类的传感器,在核工业各领域均有重要的应用。 选用Canberra 伽马相机,采用钨合金准直器结构, 外壳采用圆柱形钨合金材料,自带处理电路,热点定位和核素能谱分析能力较为突出, 由于其成像原理和提高探测精度的需求,其作业位置需要尽量接近可能的热点位置。
机器人平台为伽马相机提供运动平台、安装支撑、通信链路中继及能源供给等任务。
伽马相机需要使用俯仰自由度系统,机器人可加载云台系统提供俯仰控制。 由于伽马相机质量较大,在机器人加速或急停的过程中,会对俯仰传动结构产生较大的冲击,故拟考虑加入电磁抱闸刹车装置,机器人运动过程中,抱闸装置通电将俯仰轴锁死, 当云台有俯仰控制指令时,抱闸松开。 由于伽马相机质量较大,俯仰所需扭矩和刚度较大,故拟采用谐波减速器作为俯仰驱动结构。 谐波减速器具有扭矩大、传动平稳、过载能力强、轴向尺寸小和减速比大的优点,配合盘式伺服电机,可以在较小的体积内实现较大的扭矩输出,满足俯仰相机的需求。
伽马相机俯仰过程中需要对相机进行角度检测,以防止和机体发生干涉碰撞,拟采用绝对位置光电编码器提供位置信息反馈,该类型编码器具有高精度的优点,角分辨率可达到0.1°以上。伽马相机的固定采用抱紧装置,和原厂系统采用的固定方式类似,具有较高的可靠性。
2.2.2 定位导航
车体携带激光雷达传感器,负责对前方障碍物轮廓进行探测并通过同时定位与地图构建(Simultaneous Localization and Mapping,SLAM)技术进行未知环境地图构建,为后续探测和处理提供依据。 同时为提高视频导航效率和准确率,于机器人四面安装4 台广角摄像机,通过视频拼接方式获得机器人周边360°的全景图像(图5),方便操作者掌握全局信息。
2.2.3 系统通信
对于系统通信链路,采用无线/有线双模式进行工作, 当环境屏蔽不强或者在室外环境时,可以采用无线方式提高机体的灵活性;但是大多数核设施内均有较强的屏蔽性,无线传输距离有限且极不稳定,为保证机器人通信畅通,需要采用有线方式。 传统的线控采用送线的方式,需要人工操作且存在线缆易被卡死的弊病[5,6]。退役等设备内多障碍物和曲折,很容易发生线缆卡死的情况,故采用自动送线结构,送线装置根据机器人行走的距离放出等长线缆,并可以检测线缆的张紧程度保证不会发生断裂。 传输线缆使用光纤代替传统的铜线传输,线缆更细同时抗干扰能力更强。 光纤送线器样机如图6 所示。
2.2.4 控制系统
机器人控制系统核心电路板由嵌入式工控电脑和多轴控制器组成。 控制系统结构如图7 所示。 其中工控负责伽马相机数据采集、转发和激光雷达传感器的信息处理决策,嵌入式工控电脑负责四轮的伺服运动控制和系统状态监控。

图6 光纤送线器样机
嵌入式工控电脑采用体积小、稳定性高的研华PC104+系统, 但由于PC104+系统复杂度较高,因此其耐辐射能力较低,但伽马相机后部多道处理电路的信号难以长距离传输,因此需要在机器人就近进行数据分析后通过数字总线方式传回远端控制台进行分析或存储。 因此具有PC104+系统的电脑必须安装于机器人之上,因而控制系统采用分层架构设计, 即顶层PC104+电脑负责导航和伽马相机数据处理、 数据融合;底层嵌入式系统负责机器人基本运动控制,其耐辐照能力更高,当顶层电脑发生故障后,底层依然可以满足机器人系统通过遥操作方式进行作业的需求。
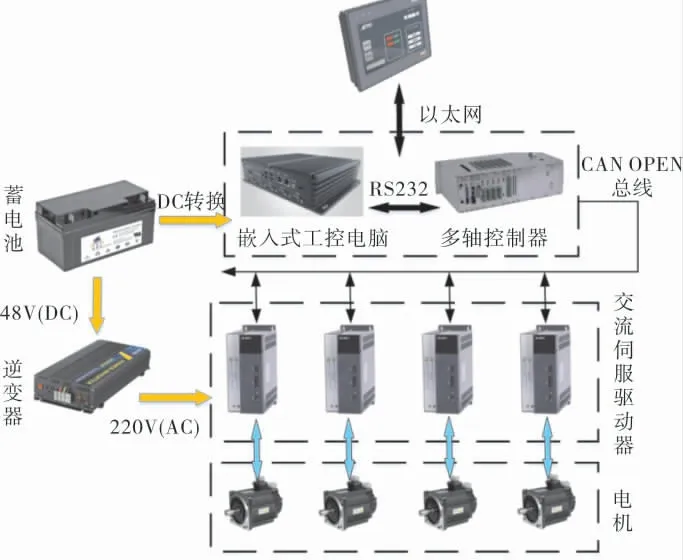
图7 控制系统结构示意图
嵌入式系统基于STM32 核心处理器开发,负责向电机驱动器转发指令并进行系统状态监控和保护。 该控制结构可将伽马相机和机器人控制系统有机融合,从而简化系统结构,提高可靠性。
机械搭载后需要考虑控制信号和电源系统的搭载,伽马相机使用PC 软件进行处理,并使用其专用的数据处理器,机器人携带PC104+系统,可运行伽马相机所需要的操作系统和软件环境,若其软件开放API, 可将结果实时传输回上位机观察,若不开放API,可通过远程桌面等方式实时观察图片或读取数据。 伽马相机系统所需电源可由机器人本体电池通过DC/DC 模块进行变压和滤波后提供。
控制端采用平板电脑作为核心, 使用专用控制手柄进行运动控制(图8)。基于Win10 系统开发可以兼容伽马相机的控制软件, 并可进行激光雷达数据处理,从而完成环境地图构建和避障任务。

图8 控制器
2.2.5 系统组装
为便于机器人的快速检修和组装,机器人采用模块化设计,各模块均为插拔式接口,整体具有较高的自主维修性。 机器人整体结构如图9 所示,装配效果如图10 所示。根据系统设计, 完成探测机器人的硬件装 配、软件系统组态,其技术指标见表1。

图9 机器人整体结构
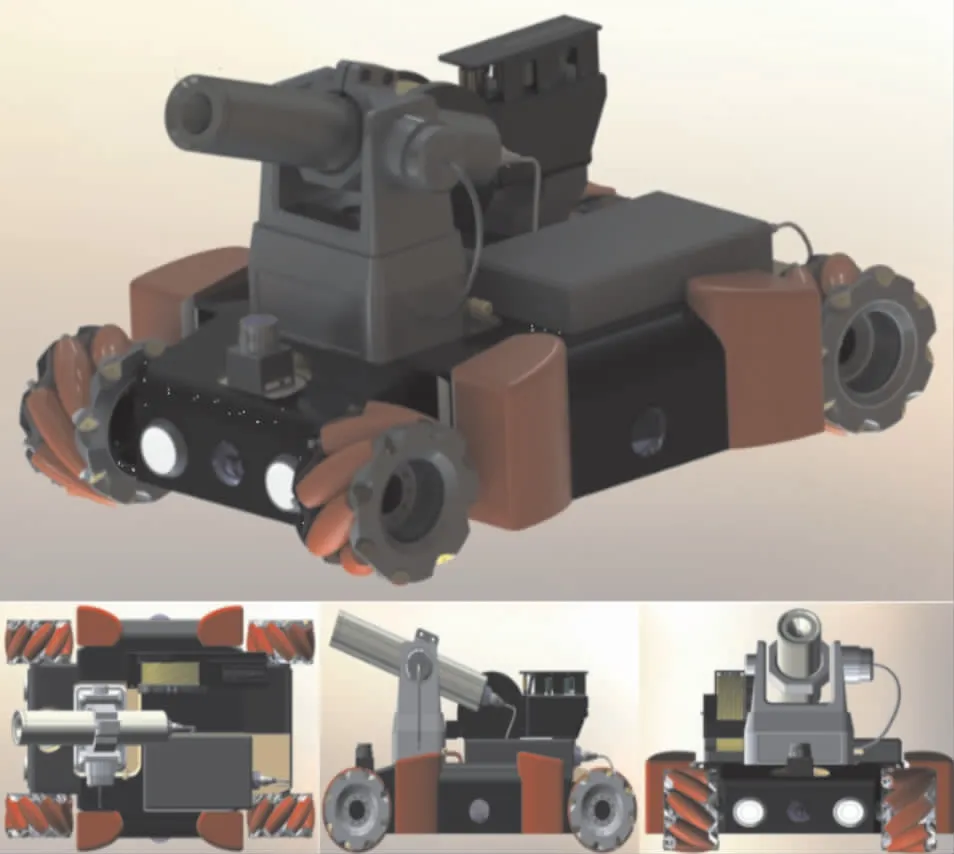
图10 机器人装配效果图
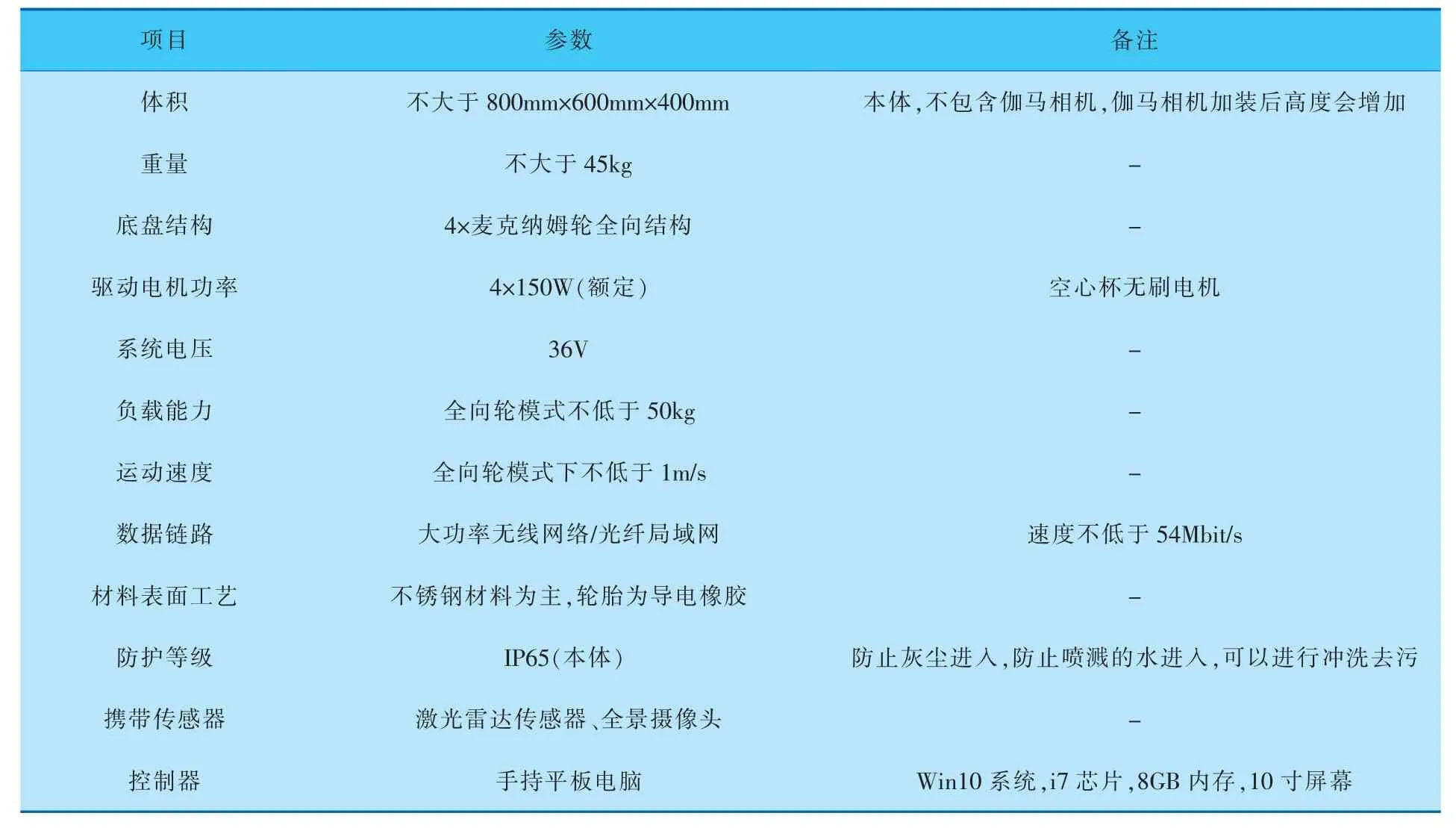
表1 机器人技术指标
3 结束语
笔者设计的中高放管道探测机器人,适用于对中高放管道内部进行巡检, 完成管道内维修、应急处置前的源项调查,为中高放管道检修方案设计和决策提供数据支持和判断。 探测机器人的应用可以直接发现管道泄漏点,减少对中高放管道的排查,减小人员受辐照的剂量率,降低运行成本。
