基于双电压环补偿的直流微网下垂控制
2021-03-18张小莲汪麒张仰飞郝思鹏刘海涛陈凡
张小莲,汪麒,张仰飞,郝思鹏,刘海涛,陈凡
(南京工程学院电力工程学院, 南京市 211167)
0 引 言
近年来,越来越多的新能源发电、储能装置和负载等都使用直流电,因此越来越多的学者开始关注直流微网[1]。与交流微网相比,直流微网结构简单、易于控制、可靠性好、功率传输效率高[2-4]。
在直流微网中,底层控制是能源管理的基础,也是实现系统稳定运行的根本[5]。而系统底层控制的主要问题在于各个分布式电源(distributed generation,DG)单元输出电流的分配。现有电流分配的主要控制方法有主从控制、平均电流控制和下垂控制[6-7],其中,下垂控制因其具有结构简单、无需通信、即插即用等特性受到了广泛关注[8-10]。
然而直流电网中各DG的线路电阻不一致,且存在本地负荷,因而会降低各DG间输出功率分配的精度,从而导致系统功率传输效率下降,同时在线路电阻上消耗的电压分量将进一步降低系统电压的质量[11-12]。针对这些问题,国内外专家学者对传统的下垂控制从不同角度提出了多种改进方案。
虚拟阻抗技术通常被用于下垂控制的改进方法中。文献[13-14]提出了基于虚拟阻抗的改进下垂控制,以消减因线路阻抗不一致而产生的环流,但没有考虑系统存在本地负荷的情况。文献[15]提出了一种以功率损耗最小为目标的虚拟阻抗优化算法来抑制并联变流器间的环流,但需要不断修正系统参数,降低了控制的实时性,且该方法仍存在电压偏差问题。下垂曲线调整方式通常是平移下垂曲线和调整下垂系数,而将这2种方法结合,其控制算法的自由度更高,解决的问题更全面。文献[16]提出了基于低带宽通信的改进下垂控制,但该方法的下垂系数固定,动态响应效果不佳,且依赖于通信。在此基础上,文献[17]做了进一步优化,添加电流调整环,可实时调节下垂系数,实现了稳态和动态均流,并引入CAN总线低带宽通信以优化通信环节,但此策略仅适用于DG额定容量相同的系统。随着各种控制算法的发展,学者们将优化算法与下垂控制的二级控制结合。文献[18]利用离散一致性算法,实现变虚拟阻抗的自适应下垂控制,该策略能够在线路阻抗未知的情况下寻找到目标下垂系数,负载突变时,动态响应性能优越。此外,不限于传统下垂曲线的一般形式,研究者们提出了新型下垂控制策略。文献[19]提出了一种“电压变化率-电流”的新型下垂控制,但该策略仍存在功率分配精度与电压偏差间的矛盾。文献[20]提出了一种增量式“功率-电压变化率”下垂控制方法,可以提高稳态下功率分配的精度,维持电压稳定,但动态分流的效果不佳。
另外,就二级控制而言,现有大部分改进方案均需要通信手段的支持,使各分布式电源可依据全局信息做实时调整。随着通信技术的不断发展,更加高效、可靠的通信方式也成为改进下垂控制领域需要考虑的重要因素之一。文献[21]采用集中控制的方法,利用中心控制器采集全网信息,再将统一处理好的指令值下发至各本地控制器,以调整各变流器的输出,此类方法由于存在中心节点,对通信要求较高,且系统的可靠性和可扩展性较差。文献[22]采用分布式控制的方法,提出了一种基于有限时间一致性的直流微网分布式控制策略,无需中心控制器,在保证负载功率分配精度的同时,还可维持较高的电压水平,但其可靠性有待验证。
综上,虽然已有学者从多种角度对下垂控制和二级控制进行研究,但功率分配精度与电压维持额定值二者相排斥的问题始终存在。为此,本文提出一种基于双电压环补偿的直流微网下垂控制方法,可以消除线路电阻不一致和本地负载不匹配的影响,适用于均流分配和按比例分配负荷的情况,且该策略使系统拥有良好的动态响应速度以及良好的稳态和动态分流性能。
1 直流微网与下垂控制
直流微网通常由分布式电源、电力电子变换器、储能装置、公共负载和本地负载构成,一般有并网和离网2种运行模式。当工作在并网状态下,直流系统通过DC-AC变换器向大电网供给或吸收电能;而离网模式下,直流微网构成一个独立的封闭系统,通过自身的分布式电源与储能装置相互配合,共同为系统内的负载供电。为了验证本文所提控制算法的有效性,设计了如图1所示的直流微网简化模型。
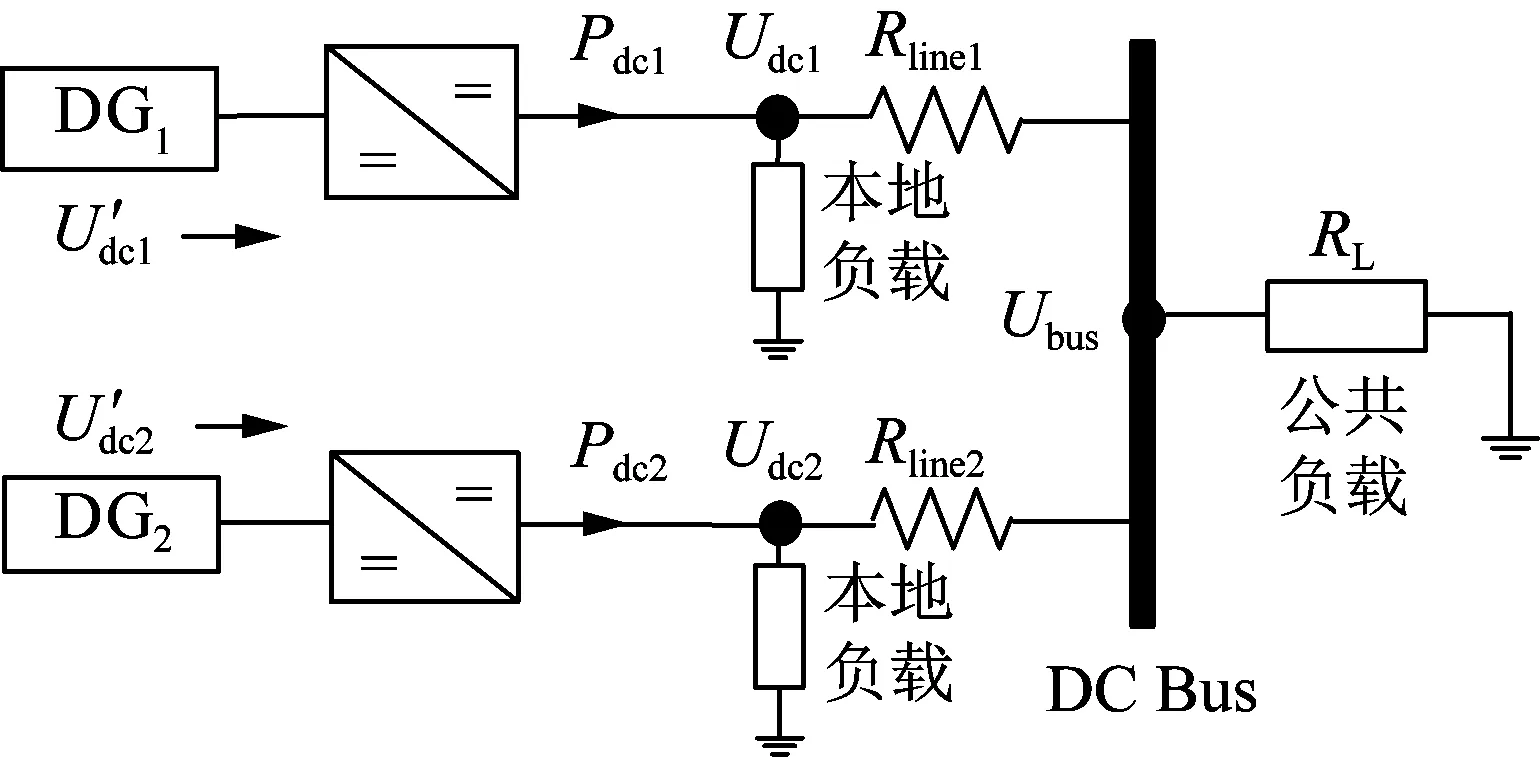
图1 直流微网结构示意图Fig.1 Schematic of DC microgrid structure
图1中:DGi(i=1,2)代表直流微网中的各分布式电源单元;Pdci为DGi的输出功率;Udci为DGi的输出电压;Rlinei为DGi的连线电阻;Ubus为公共负载两端电压。本文采用U-I下垂控制,其表达式如下:
Udciref=U′dci-IdciRdi
(1)
式中:Udciref为DGi所在变换器的输出电压参考值;U′dci为DGi所在变换器的空载输出电压;Idci为DGi所在变换器的输出电流实际值;Rdi为DGi的下垂系数。为了实现各DG负载率相同,其输出功率应依据各自的容量按比例分配,各下垂系数应满足:
Rd1I′dc1=Rd2I′dc2=…=RdiI′dci=…=RdnI′dcn
(2)
式中:I′dci为第i台变换器的额定电流;n为换流器总数。
在实际系统中,线路电阻是不可忽略的,为了更好地分析线路电阻对下垂控制的影响,构建了一个两DG的直流微网等效电路,如图2所示,通常设定两DG的空载电压U′dc1和U′dc2相等。
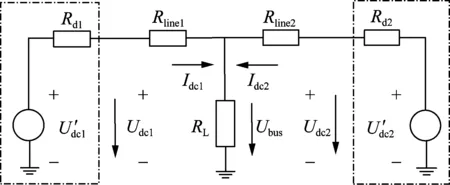
图2 直流微网的等效电路Fig.2 Equivalent circuit of a DC microgrid
下垂控制相当于在线路上添加了一个虚拟电阻,使所在线路的输出电阻远大于线路电阻,从而忽略线路电阻的影响,则有式(3)所示关系:
(3)
而由于实际电路中,各DG的线路电阻不能忽略且存在差异,此时,式(3)不再成立。从图3所示下垂曲线分析可知,ΔU小于ΔU′,而ΔI大于ΔI′(ΔU、ΔI分别对应较小下垂系数时的系统电压偏差与两DG输出电流偏差;ΔU′、ΔI′分别对应较大下垂系数时的系统电压偏差与两DG输出电流偏差),即若选择较小的下垂系数,可改善电压降落问题,但分流的精度会下降;而选择较大的下垂系数,可提高分流的精度,但电压降落情况会加重。因此,传统下垂控制存在着分流精度和电压降落难以协调这一固有矛盾。此外,若负载突然加重,下垂系数小的变换器将承受大部分电流,一旦超出其输出能力,甚至会毁损变换器;同样,母线电压会产生较大跌落,有超出其最大变化范围的可能。
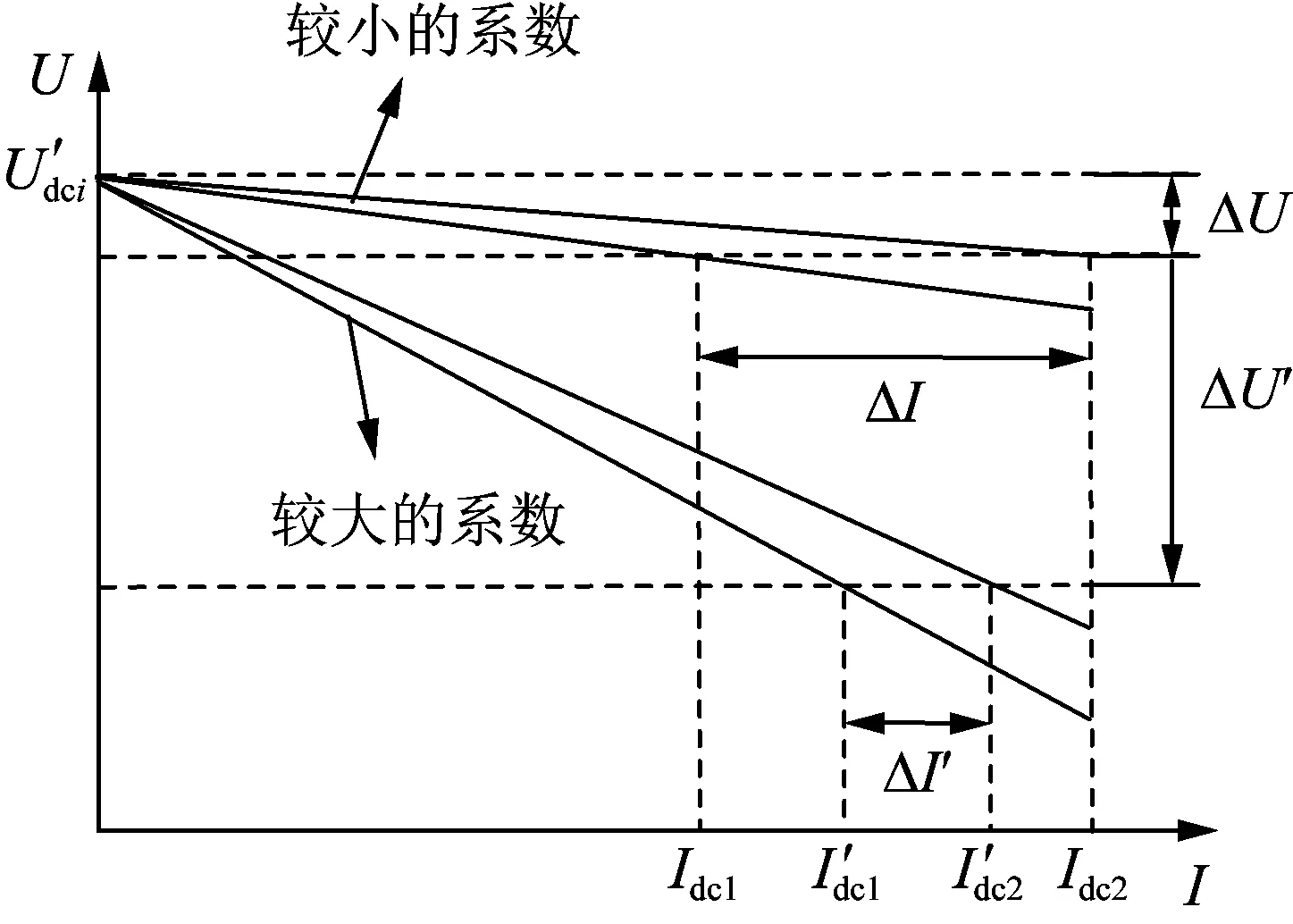
图3 传统下垂控制的局限性原理图Fig.3 Limitations of the traditional droop control
2 改进下垂控制方法
2.1 基本原理分析

当各DG容量相同时,将变换器输出电流的平均值与本地电流的差值的积分项作为第一电压环补偿量,添加第一电压环后,传统下垂控制对应的式(1)变为:
Udciref=U′dci-RdiIdci+dU1i
(4)
(5)
(6)
其中:k为积分项的常系数;Iavg为n台变换器输出电流的平均值。系统运行时,中央控制器接收各本地控制器发出的电流信号,计算其平均值并反馈回各DG单元,在积分调节下,各本地电流追踪Iavg,最终实现功率的均等分配。

图4 改进策略原理Fig.4 Principle of the improved strategy
理想条件下,各DG单元输出电流的下垂特性曲线与负载特性曲线的交点即为系统的稳定运行点。通过图4(b)分析线路电阻不匹配条件下两相同容量配比变换器的输出电流调节过程。由于两DG容量相同且设定的初始电压一致,两DG拥有相同的下垂曲线N,由于线路电阻Rline1≠Rline2,两DG的输出电流Idc1≠Idc2。假设系统当前的Idc1、Idc2分布如图4(b)所示,为消除电流偏差,加入式(5)中的电压补偿环,DG1引入了正向电压偏移量,其对应的电流下垂特性曲线由N抬升到N1,负载特性曲线由M1偏移到了M′1;DG2引入了负向电压偏移量,其对应的电流下垂特性曲线由N下降到N2,负载特性曲线由M1偏移到了M′2。积分调节后,两DG达到新的稳态工作点,解决了分流问题,但会造成系统电压的微小跌落,这是由于第一电压环的引入以两DG间输出电压的偏差增大为代价提升功率分配精度,而DG间的电压不平衡会加重公共母线电压与其额定值间的偏差程度。
因此,在此基础上添加第二电压环补偿量,从而消除第一电压环引起的微小电压降落,且使系统电压相较于传统下垂控制更接近额定值。
公共连接点的参考电压与各变换器输出电压平均值的差值反映了系统电压的降落程度,将其差值经PI调节后获得的补偿量再叠加到各变换器的输出电压上,即可抬高系统电压。添加第二电压环后,式(4)变为:
Udciref=U′dci-RdiIdci+dU1i+dU2i
(7)
dU2i=(U′dci-Uavg)GuPI
(8)
(9)
式中:GuPI为电压偏差补偿量上PI控制器的调节参数。由式(7)可知,dU2i的存在可以消减下垂系数与线路电阻引起的电压降落。引入第二电压环后,两DG系统的电压调节效果如图4(c)所示,只要Uavg低于U′dci,PI调节器将不断调控电压补偿量dU2i,直至系统电压达到参考值。
2.2 不同容量DG系统中改进算法的应用
学者们在研究下垂控制时,研究重点通常是让各DG所发功率相同,然而功率的合理分配应是各DG负载率相等,如此才能在系统负载增加时使容量较小的DG免于先行满载而失去其下垂控制所带来的功率调节能力[23]。
对于DG额定容量配比不同的系统,理想条件下,其下垂系数的设定原则满足式(2)即可,但实际条件下,由于线路电阻的存在,各DG分配好的负载功率在线路上额外产生了不同程度的能耗,从而降低功率分配的精度。此外,由于采集误差、谐波注入和参数偏移等因素,实际系统的等效输出阻抗难以精准设计[24]。
针对DG不同容量配比的系统,中央控制器下发给各本地控制器的电流信号需要根据各DG的额定容量进行修改,此时,将式(6)中的电流指令Iavg改为式(10)中的I′avgi,即可实现不同容量配比下,各变换器输出电流按比例精准分配。
(10)
2.3 控制系统的动态性能分析
根据图2的等效电路图和图4(a)的控制框图,以DG2为对象,得到双电压环控制下系统的结构框图,如图5所示。
图5中:GiPI(s)为下垂控制电流环PI控制器的传递函数,比例积分系数为kiP、kiI;GuPI(s)为下垂控制电压环PI控制器的传递函数,比例积分系数为kuP、kuI;G′uPI(s)为本文所提第二电压环PI控制器的传递函数,比例积分系数为k′uP、k′uI;C为分布式电源直流母线滤波电容;Idc2ref为电流内环的参考输出电流;Ic2为滤波电容电流。
基于图5所示的结构框图,根据梅逊增益公式推导得出第一电压环控制和第二电压环控制的传递函数,如式(11)和式(17)所示。
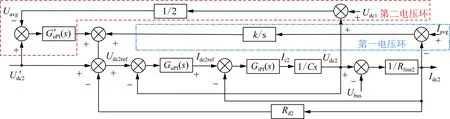
图5 控制系统的结构框图Fig.5 Structural block diagram of the control system
(11)
其中:
A1=kuPkiI+kuIkiP
(12)
(13)

(14)

(15)
(16)
(17)
其中:
(18)

(19)
(20)

(21)

(22)

(23)
(24)
本文采用的系统参数如表1所示。
图6和图7分别给出了第一电压环控制和第二电压环控制传递函数对应的Bode图,测得的性能指标参数结果如表2所示。从分析结果来看,第一电压环和第二电压环响应时间都较快,具有良好的动态性能。
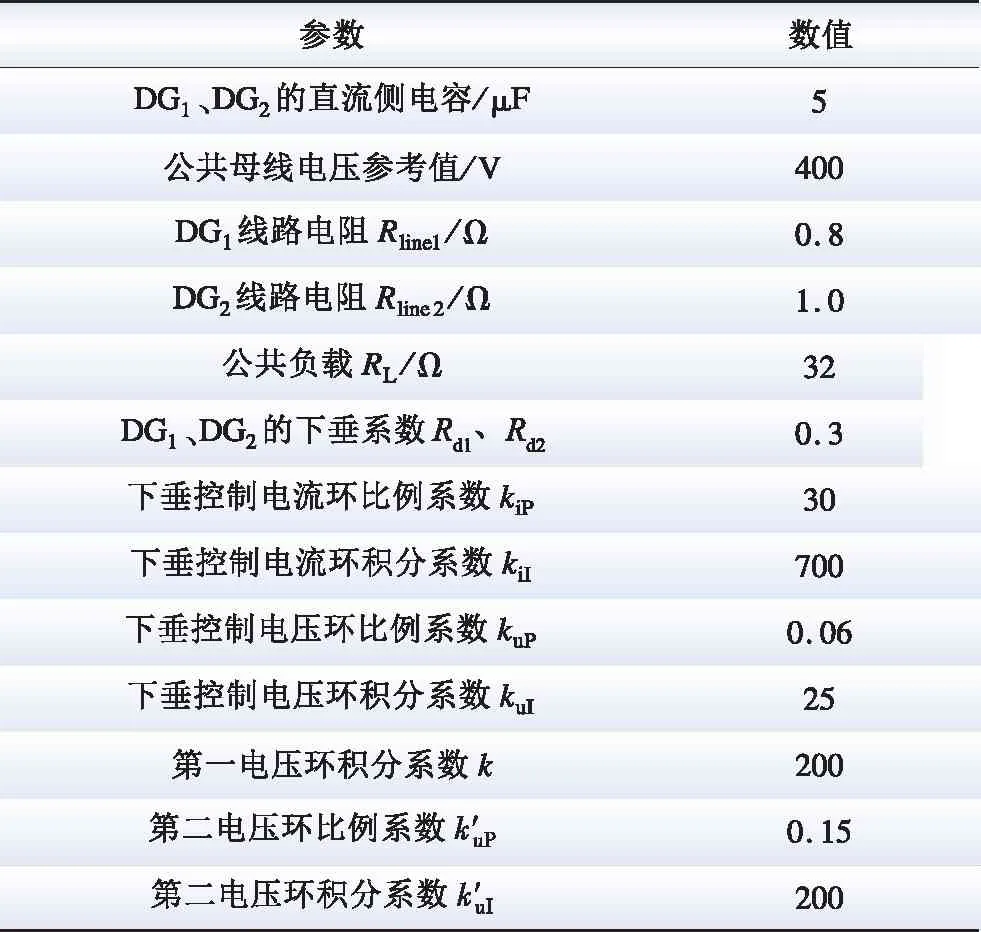
表1 系统参数Table 1 Parameters of the system

图6 第一电压环传递函数的伯德图Fig.6 Bode diagram of the transfer function of the first voltage loop

图7 第二电压环传递函数的伯德图Fig.7 Bode diagram of the transfer function of the second voltage loop

表2 性能指标分析结果Table 2 Results of performance indicators
3 仿真分析
为验证本文所提控制算法的有效性,在Matlab/Simulink上构建如图1所示仿真系统。
3.1 传统算法与改进算法对比
本节算例中,系统参数如表1所示,公共负载为5 kW。图8为传统下垂控制的仿真结果,由于两DG线路电阻不一致,系统达到稳态后,由图8(a)可知,两DG输出功率分别为2.61 kW和2.26 kW,存在明显的均分误差;由图8(b)可知,系统母线电压偏差较大。
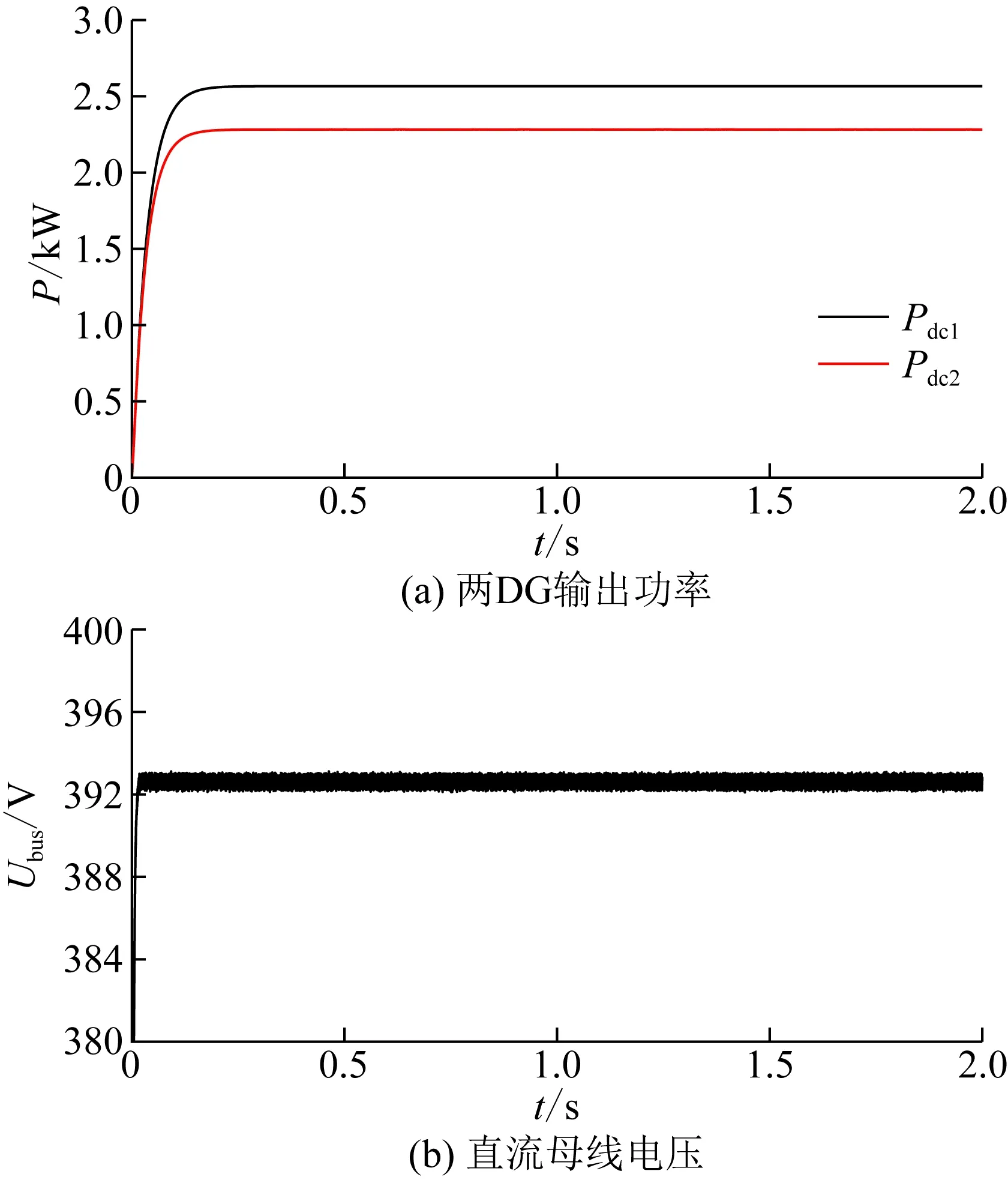
图8 传统下垂控制的仿真结果Fig.8 Results of traditional droop control
图9为引入第一电压环后的仿真结果。由图9(a)可知,在系统中引入本文所提改进算法的第一电压环后,两DG输出功率分别为2.46 kW和2.45 kW,基本可按其下垂系数比例实现1∶1分配;从图9(b)可知,相较于传统下垂控制,母线电压有约0.5 V微小跌落。此时,添加第二电压环,其仿真结果如图10所示。图10(a)与图9(a)对比显示,第二电压环引入后,两DG功率分别为2.48 kW和2.47 kW,分配比例变化不大,但整体数值有所提升,系统功率分配效果有所改善;图10(b)与图9(b)对比显示,电压提升效果明显,可弥补第一电压环带来的弊端,且电压偏差相较于传统算法仍有较大提升效果。因此,本文所提控制策略能有效缓解传统下垂控制功率分配精度与电压偏差间的矛盾。
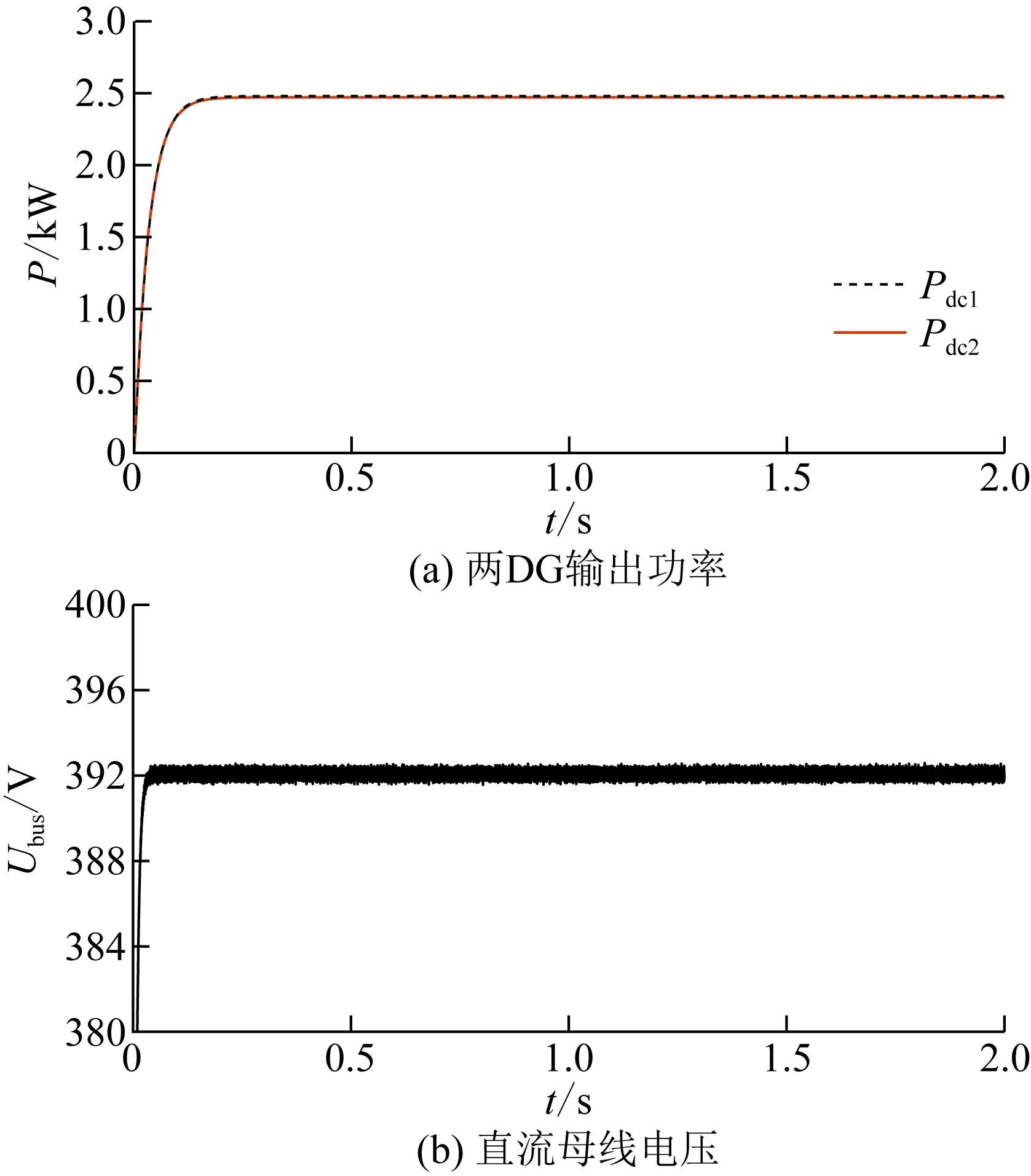
图9 系统引入第一电压环的仿真结果Fig.9 Results of the system with the first voltage loop
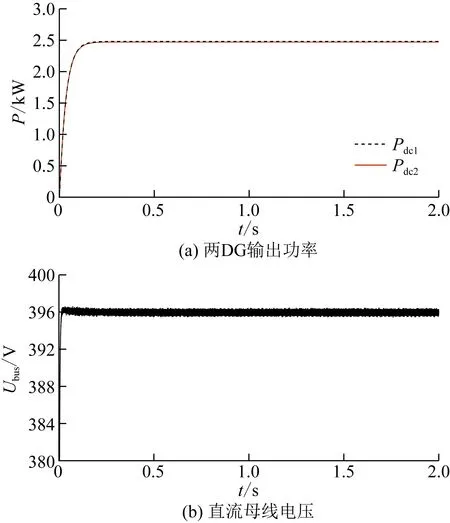
图10 系统引入双电压环的仿真结果Fig.10 Results of the system with two voltage loops
3.2 负载突变时改进算法的动态性能分析
针对连线阻抗存在差异而导致传统下垂控制无法实现功率均分的问题,现有方案侧重于解决稳态均流而未能兼顾系统的动态响应性能,从而可能出现动态响应缓慢、动态分流偏差较大等问题,进而严重影响系统用电质量。这一现象在系统负载突变时尤为显著。
在本节算例中,公共负载在2 s前为5 kW,2 s时增大为10 kW,4 s时又降为5 kW,系统中其他参数如表1所示。
图11为文献[20]所提增量式下垂控制下DG功率分配的结果,可见,2 s和4 s,公共负载突变时,系统调节时间较长且动态过程中未能实现电流均分。图12为本文所提改进策略的分配结果,可见,负载突变时,经过很短的时间,系统即可重新进入稳态,且暂态过程中,两DG出力始终一致。因此,本文所提改进策略使系统拥有良好动态响应速度和精准的动态、稳态分流特性。
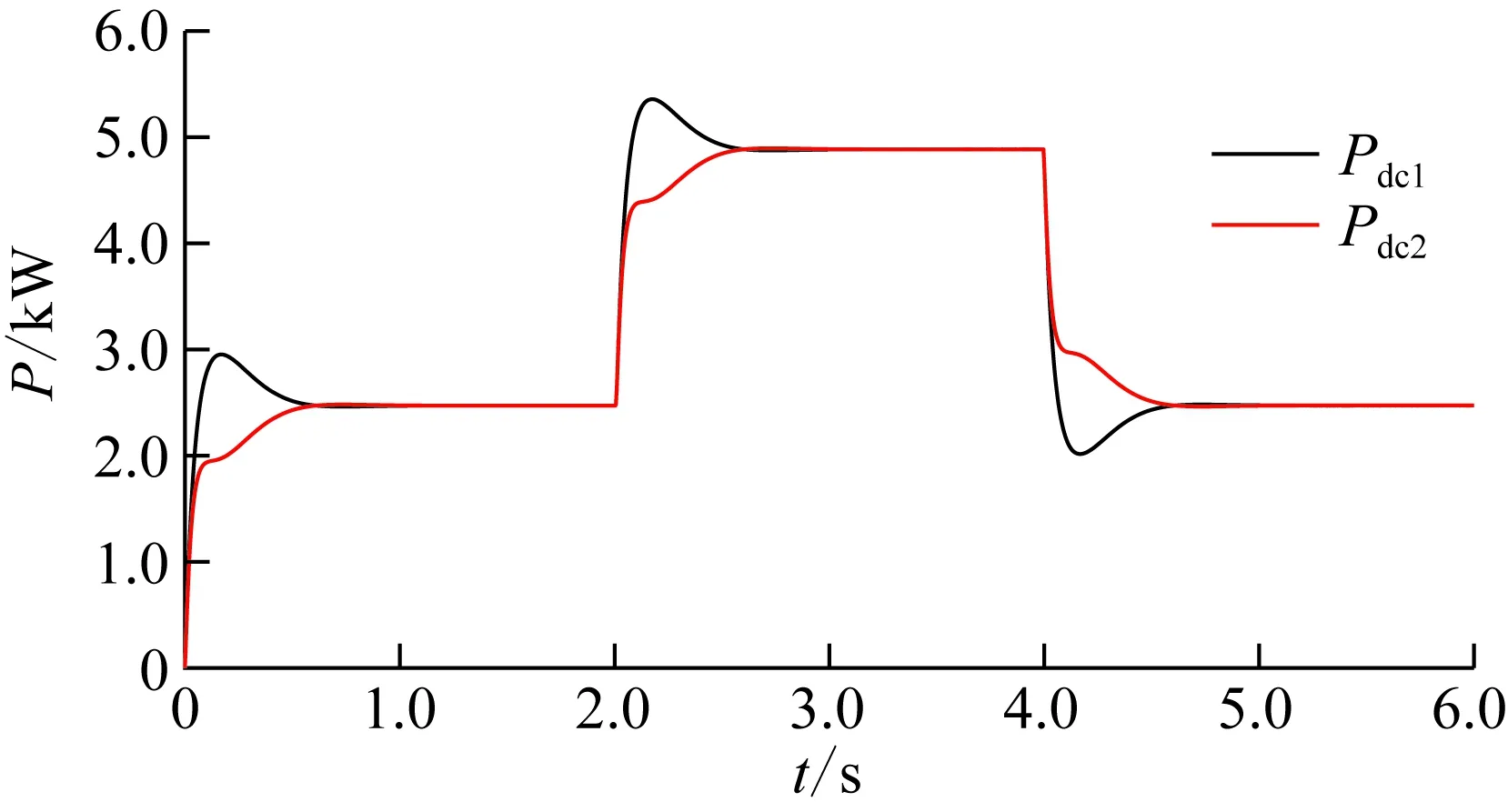
图11 文献[20]所提增量式下垂控制的仿真结果Fig.11 Results with the incremental droop control method in Ref.[20]

图12 本文所提控制策略的仿真结果Fig.12 Results with proposed control strategy
3.3 存在本地负载时改进算法的仿真验证
在本节算例中,同时考虑各DG本地负载和公共负载存在的情况,系统中各DG本地负载与公共负载分布情况如表3所示。

表3 系统负载的分布情况Table 3 Load data of the system
采用传统下垂控制的仿真结果如图13所示,从图13(a)可看出,当且仅当1 s前,两DG线路电阻和本地负载均一致时,DG的输出功率可以实现均分;而1 s之后,由于线路电阻和本地负载中有一个不一致或者两者都不匹配,各DG的负载率均无法维持1∶1的配比精度,DG1输出功率超过其额定值而重载运行,DG2输出功率低于其额定值而轻载运行,DG输出功率分配精度严重下降,同时系统电压偏差情况进一步恶化,如图13(b)所示。图14为采用本文方法的仿真结果,由图14(a)可知,采用本文所提控制算法,不论是本地负载和公共负载均一致条件下,还是本地负载和公共负载不一致时,各DG均能按照1∶1的比例精准分配,同时由图14(b)可知,直流母线电压始终可以维持在较高水平,用户的供电质量得以提升。因此,本文所提策略不仅适用于连线电阻不一致的情况,还适用于本地负载不一致或两者均不一致的情况。
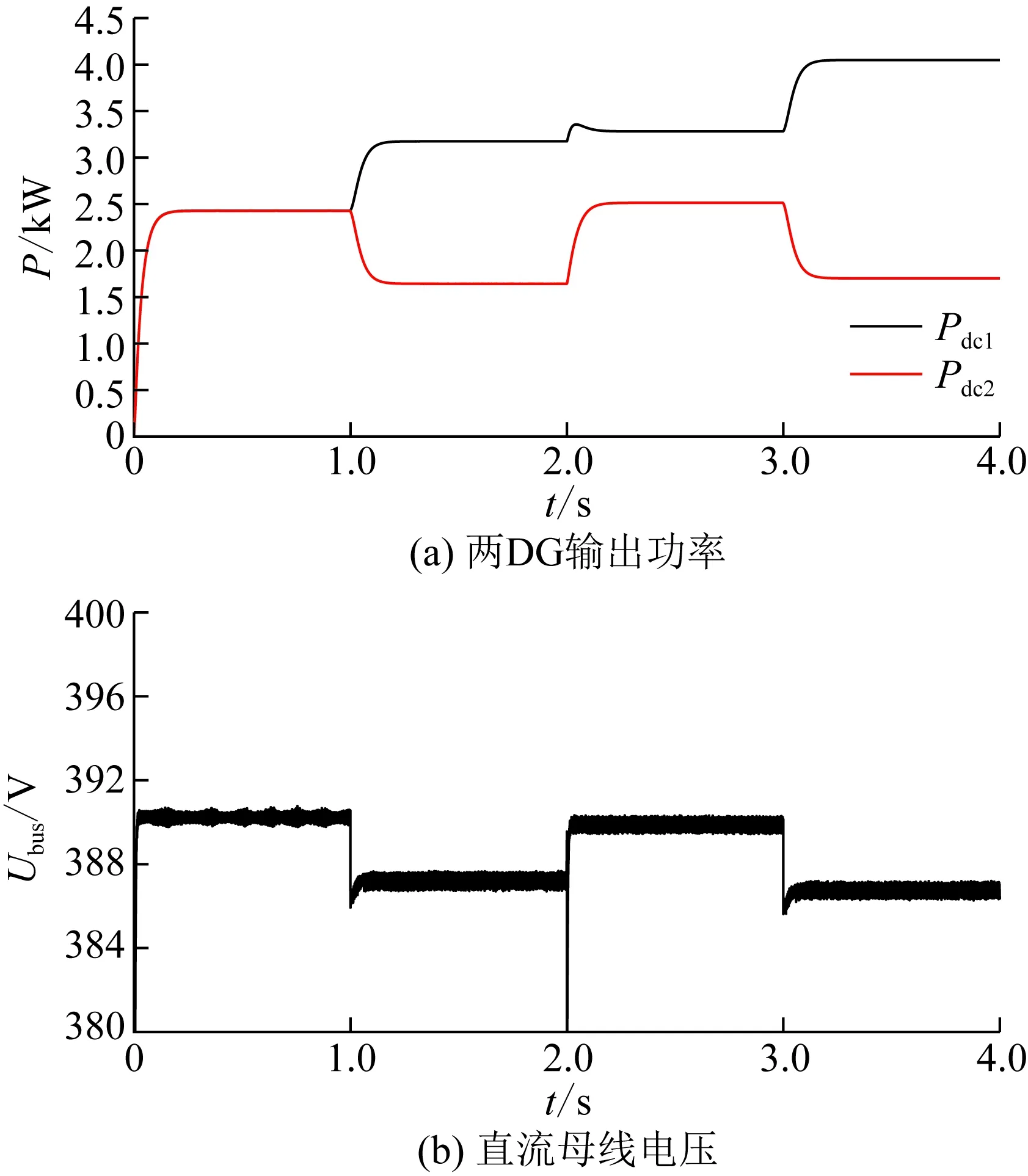
图13 存在本地负载时传统下垂控制的仿真结果Fig.13 Results of traditional droop controlin the presence of local load
3.4 DG容量不同时改进算法的有效性验证
在本节算例中,设定DG1和DG2的容量配比为2∶1,则根据式(2),两下垂系数有Rd2=2Rd1=0.6,公共负载初始为5 kW,2 s时增至10 kW。
应用传统算法时两DG输出功率的分配情况如图15所示,2 s前,显然两者的功率输出较2∶1的配比仍有较大误差;2 s后公共负载翻一倍,功率分配的误差进一步加大。图16为采用本文所提方法的仿真结果,由图16可知,2 s前以及2 s后公共负载突变情况下,两DG均可精准按2∶1的配比出力。因此,本文所提策略应用于DG不同额定容量配比的系统中,仍可以实现各DG负载率相同。
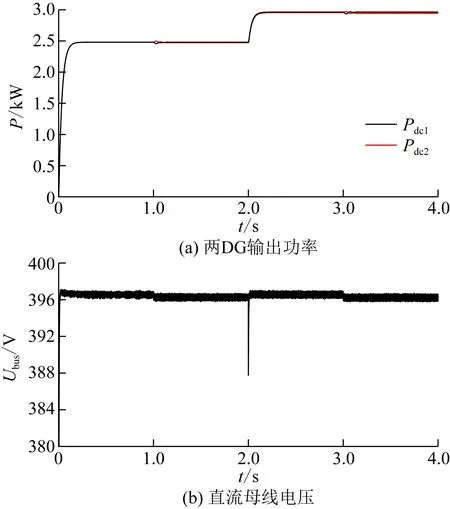
图14 存在本地负载时改进算法的仿真结果Fig.14 Results of the improved droop controlin the presence of local load
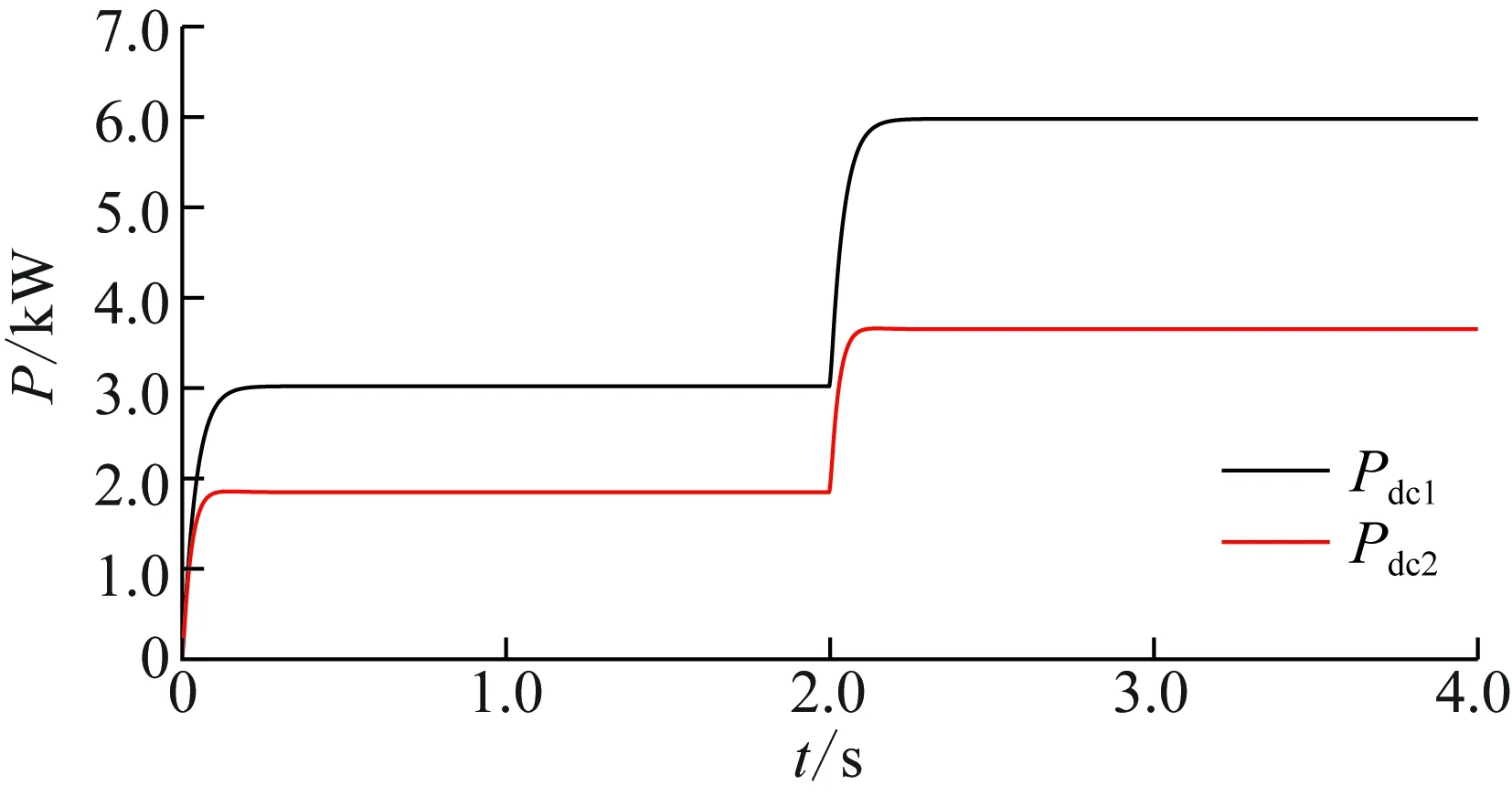
图15 DG容量不同时传统下垂控制的仿真结果Fig.15 Results of traditional droop controlunder different DG capacities
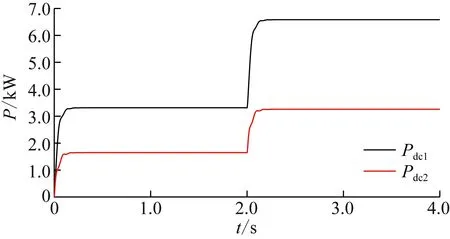
图16 DG容量不同时改进算法的仿真结果Fig.16 Results of the improved droop controlunder different DG capacities
4 结 论
本文针对线路电阻不一致的直流微网系统,将本地负载和公共负载突变等因素考虑在内,分析了传统下垂控制方法存在的缺陷,提出了一种基于双电压环补偿的直流微网下垂控制方法,通过对控制算法进行仿真分析,得到以下结论:
1)本文所提控制策略可以消除线路电阻不一致和本地负载不匹配的影响,有效缓解功率分配与电压偏差间的矛盾,适用于负荷功率均等分配和按比例分配的情况;
2)该策略增加了基于电流控制的电压补偿控制环,将电流分配问题转化为电压控制,无需修改下垂系数,而且仅通过电压控制既实现了功率精准分配,又改善了电压跌落问题,控制更为简单有效;
3)该策略使系统拥有良好动态响应速度,具有良好的稳态和动态分流性能。