基于特显点的机载分布式相参雷达同步误差校正方法
2021-03-17陈金铭吴建新刘晓瑜
陈金铭 王 彤 吴建新 刘晓瑜
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
1 引言
分布式相参雷达(Distributed Coherent Aperture Radar, DCAR)由多部小孔径单元雷达组成,通过单元雷达之间信号的相参处理,等效获得大孔径雷达的性能,这一概念最初由美国林肯实验室的弹道导弹防御(Ballistic Missile Defense, BMD)局在
2003年提出[1,2]。早期系统由两部地基单元雷达组成,该系统首先工作在接收相参模式下,发射正交波形,并估计相参参数;随后,转入发射-接收相参模式,也称为全相参模式,发射相同波形,利用估计的相参参数对发射和接收信号进行补偿,使得信号在目标位置处和接收端处均可相参合成,实现全相参处理。
相比较于地基DCAR,机载DCAR具有探测距离远、机动性高和部署灵活等优点。然而,由于载机位置实时变化,机载DCAR对单元雷达之间的同步提出了更高的要求。同步需要解决的问题是实现各个收发单元信号在时间、空间和相位上的对齐。
DCAR自从提出以来一直受到国内外相关研究人员的广泛关注。文献[3]分析了 M部单元雷达组成的DCAR的性能边界,得出DCAR在相参接收和相参发射-接收模式下分别可获得 M2和 M3倍的SNR增益的结论;文献[4–6]推导了DCAR相参参数估计的克拉美-罗下界(Cramer-Rao Lower Bound, CRLB),然而该推导建立在理想信号模型下;文献[7]提出了一种基于单快拍数据的DCAR阵列测角方法,利用分布式阵列扩展的物理孔径提高角度估计精度;文献[8]研究了DCAR几何布阵的约束条件,单元雷达布阵需要满足回波相关、信号相参、目标可分辨等条件;文献[9]研究了一种利用精轨卫星对DCAR同步误差进行校正的方法;文献[10]提出了基于滤波器网格失配下的DCAR目标参数估计方法,解决目标信号频率和滤波器中心频率未对准的问题;文献[11,12]研究了时间和相位同步问题对DCAR的影响,然而,该研究针对地基DCAR,不适用于机载DCAR各个载机平台位置实时变化的情况。
上述研究均未考虑机载DCAR存在同步误差时的目标相参合成问题,然而,实际环境中机载DCAR不可避免地存在各种同步误差,对目标相参合成之前需要对同步误差校正。为此,本文首先建立了基于慢时间码分多址(Slow-Time Code Division Multiple Access, ST-CDMA)波形[13]的机载DCAR信号模型及其矩阵表示形式;接着,分析了时间、空间和相位同步误差对目标相参合成的影响;最后,考虑到多输入多输出(Multiple Input Multiple Output,MIMO)模式下不同收发单元的信号可分离,利用特显点阵列对机载DCAR同步误差进行校正。仿真实验表明所提方法能够准确校正DCAR同步误差,实现目标相参合成。
2 基于ST-CDMA波形的机载DCAR信号模型
机载DCAR由 M 部收发共置的相同单元雷达组成,均独立搭载在各自载机平台上,载机飞行高度和速度均相同,一个相干处理间隔内(Coherent Processing Interval, CPI)的相干脉冲数为 K,脉冲重复频率(Pulse Repetition Frequency, PRF)为fr,脉冲重复间隔(Pulse Repetition Interval,PRI)为 Tr。MIMO模式下 M个发射波形相互正交,为了获得较好的多输入单输出(Multiple Input Single Output, MISO)对消比[14],避免不同收发单元的信号去相关,采用ST-CDMA波形作为MIMO雷达的发射波形。发射信号经过目标照射返回接收单元。第n 个接收单元的信号可以表示为

其中, P 表示目标信号数,ξp表 示第p 个目标的复散射系数,且满足相参探测条件[8],(t)为参考信号,ϕm,k表 示第m 个发射单元、第k 个脉冲的调制相位,f0表示信号载频,,n,p表示第m 个发射单元、第n个接收单元、第p 个目标的多普勒频率,写成

其中, va表示载机速度大小,λ 表示波长,,p表示第 p个目标相对于第m 个发射单元的径向速度,,p表 示第p 个 目标相对于第n 个接收单元的径向速度,,p表 示第p 个目标和第m 个发射单元的速度锥角,ψnr,p表 示第p 个 目标和第n 个接收单元的速度锥角。 τm,n,p表示第m 个发射单元、第n 个接收单元、第p 个目标的信号时延,写成

其中, c 表示光速,zp=[zp,x,zp,y,zp,z]T表示第p 个目标位置,=[pm,x,pm,y,pm,z]T表示第m 个发射单元位置,=[pn,x,pn,y,pn,z]T表示第n 个接收单元位置,nn(t)表 示第n 个接收单元的噪声信号。
第 n个接收单元、第k 个脉冲的信号经过解调、低通滤波和离散时间采样处理,采样间隔为Ts,采样点数(距离单元数)为 L=Tr/Ts,则第l 个采样时刻tl=lTr/L 对应的第l 个采样信号,k(l)可以写成
经过脉冲压缩处理,可得


其中, Sn表 示第n 个接收单元的空域信息矩阵,可以写成

其中,Cm,n=diag([exp{−j2πf0τm,n,1),exp{−j2πf0τm,n,2},···,exp{−j2πf0τm,n,P}]) , Tn表示第n 个接收单元的时域信息矩阵,可以写成

其 中,Mm=diag([exp{jϕm,1},exp{jϕm,2},···,exp {jϕm,K}])和 Dm,n=[dm,n,1,dm,n,2,···,dm,n,p],且列向 量 dm,n,p= [1,exp{j2π,n,pTr},···,exp{j2π,n,p(K −1)Tr}]T表 示第m 个 发射单元、第n 个 发射单元、第 p个目标的时域导向矢量,x =[ξ1,ξ2,···,ξP]T表示P 个目标复散射系数排成的列向量,b=[β(1),β(2),···,β(L)] 表示 L 个距离单元的信号排成的行向量,表示噪声分量矩阵。
解调发射单元调制相位,以 fr/M为截止频率低通滤波,可以实现发射信号分离。抽取后第m 个发射单元、第n 个接收单元的信号Ym,n可以表示为

其中, F 为K ×Kf/M 维的多普勒滤波矩阵,Kf为多普勒通道数,多普勒滤波抽取基带信号占据的Kf/M 个多普勒通道,Nm,n表示多普勒滤波后的噪声分量矩阵。
3 机载DCAR同步误差分析
影响机载DCAR相参合成的同步误差包括:(1)发射时间同步误差;(2)混频引入的发射和接收初相;(3)发射和接收单元幅相误差;(4)发射和接收单元位置误差;(5)滤波器失配引入的残余相位。其中,(1)影响目标信号时延,(4)影响目标信号空间传播路径,以上5种因素均影响目标信号相位。同步误差的存在使得经过相参参数补偿后的各收发单元的信号无法在时间、空间和相位上对齐,严重破坏目标的相参合成。含有以上5种同步误差的接收信号可以写成


其中,∆ pm表示第m 个单元的位置误差向量,一个CPI内同一个收发单元的位置误差相同,表示第m 个发射单元的幅相误差,表示第n 个接收单元的幅相误差,表示第m 个发射单元的发射初相,发射单元的本地振荡器的初相不同引入发射初相,∆τm,n=−表 示发射时间同步误差,表示第 m个发射单元的脉冲前沿触发时刻,表示第n个接收单元开始接收信号的时刻,发射单元的脉冲前沿触发时刻不同引入发射时间同步误差。引入同步误差的第 n 个接收单元、第k 个脉冲、第l个距离单元的采样信号经过脉冲压缩处理,表示为


其中,h (l)表 示参考滤波器,L0表示脉冲压缩后的信号增益,函数p (α,x)=sin(παx)/sin(πx), Lf表示距离频域信号点数,∆ l表示距离域频率差,可以写成∆l=[fs(,n,p−∆τm,n)−l]/Lf,引入的最大残余相位为 2 π(Lf−1)/2/2Lf≈π/2。类似于脉冲压缩处理,接收信号在多普勒滤波时也会引入残余相位,表示为
其中,∆ kf表 示多普勒频率差,写成∆kf=,n,p/fr−kf/K 。进而,抽取后的第m 个发射单元、第n 个接收单元的信号表示为


4 基于特显点的机载DCAR同步误差校正方法
接收信号包含的同步误差按照处理方法可以分为滤波器失配误差、单元位置误差和等效幅相误差3类。采用以下信号处理方案校正DCAR同步误差:(1)利用基于稀疏傅里叶变换(Sparse Fourier Transform, SFT)的搜索的方法消除滤波器失配误差;(2)利用多特显点构成的等效天线阵列校正单元位置误差;(3)利用特征结构方法校正等效幅相误差。
4.1 滤波器失配误差消除
接收信号在进行脉冲压缩和多普勒滤波处理时,由于滤波器中心频率不能和目标信号频率对准,将会引入滤波器失配误差。遍历搜索滤波器的方法虽然可以获得最优滤波器,然而这种方法运算量过大且效率较低,考虑到目标信号的频率相对于全局频域是稀疏的,利用基于SFT搜索的方法[10]先通过梯度下降的方式估计目标信号频率、再一次性构造特定滤波器实现最优滤波。消除滤波器失配误差后的第m 个发射单元、第n 个接收单元、第p 个目标的信号,n,p表示为

4.2 基于多特显点的单元位置误差校正
DCAR单元位置误差的校正需要在MIMO模式下利用多特显点构成的等效天线阵列反向估计完成。MIMO模式下发射波形相互正交,接收端可以分离不同收发单元的位置误差;而在相控阵模式下,由于发射波形相参,不同单元的位置误差相互耦合无法分离估计。
特显点也称强散射点,它的位置先验已知,以特显点回波信号作为参考信号,通过搜索的方式完成单元雷达位置误差的估计。实际应用中特显点的选取一般采用基于地理信息和布置角反射器两类方法。基于地理信息的选取方法主要依赖孤立强杂波点,如铁塔、风车、稀疏村落等,利用全球定位系统和地理信息系统确定这些孤立强杂波点的位置,并将这些孤立强杂波点作为特显点;布置角反射器的方法主要采用人为方式在观测环境中放置一些角反射器,这些角反射器的位置已知,发射信号经过角反射器照射后能量可以高度集中地返回接收单元,因而角反射器也可以作为特显点。
4.2.1 基于目标的估计方法
考虑到信号传播路径的可交换性,即发射单元的信号经过特显点照射,返回至接收单元,该信号路径时延引起的相位和信号先由特显点经过接收单元,再由发射单元返回至特显点的路径时延引起的相位相同。对于采用协同式构型的DCAR的自发自收信号分量,发射单元和接收单元对应同一单元雷达,可以认为信号首先由特显点目标发射,经过单元雷达照射,返回至特显点目标。由于多特显点的信息先验已知,可以在特显点阵列流型下将单元雷达作为目标,利用重排后的接收信号的自发自收分量,独立地反向估计单元位置误差,图1给出了基于目标的估计方法的示意图。
信号经过特显点反射后,式(17)可以表示为

其中, ξ0表示相同的反射相位,为了便于描述,,n,p忽 略下标n。特显点阵列流型下单元雷达方向的虚拟导向矢量可以表示为a=[∠y′m,1,∠y′m,2,···,∠y′m,P]T, 数学运算符号∠,p表 示取第m 个自发自收单元、第 p个特显点接收信号的相位。接着,对第m 个单元的理想位置临近区域搜索,将临近区域均匀划分为 W个网格,则第m 个单元、第w 个网格在特显点阵列流型下的导向矢量可以写成

其中, pm,ω表示第m 个单元、第w 个网格的理想位置,mp表示第p 个特显点的位置。根据白噪声条件下匹配滤波器是最优滤波器的准则,搜索到第m 个单元位置的估计,可以写成

4.2.2 基于中继的估计方法

图1 基于目标的估计方法示意图
基于目标的估计方法仅利用了接收信号的自发自收分量,该方法估计单元位置误差时浪费了大量接收信号信息。充分利用接收信息可以提高单元雷达的位置误差估计精度,将单元雷达视作可以转发信号的中继站,一个单元雷达接收的信号可以通过任意单元雷达返回特显点阵列。利用重排后接收信号的所有收发分量以及已估计的位置误差知识,实现位置误差的估计,图2给出了基于中继的估计方法的示意图。
考虑到单元雷达的实际位置到特显点的路径和理想位置到特显点的路径差异很小,利用Taylor近似分离理想路径差和单元位置误差,表示为

经过理想路径差对应的时延补偿后的第m 个发射单元、第n 个接收单元、第p 个目标的信号为

直接利用接收信号的所有收发分量搜索,单元位置误差的估计彼此相关,然而这种方法搜索量十分巨大。采用一种逐步逼近的估计方法,估计第m 个单元雷达的位置误差时利用已估计的( m −1)个位置误差信息,并选取接收信号的前m 个收发单元组成的3阶张量∈Cm×m×P。第m 个单元的位置误差的虚拟导向矢量可以表示为=vec(∠)。对第 m个单元理想位置临近区域搜索,将临近区域均匀划分为 W个网格,则第m 个单元、第w 个网格点更新后的位置误差搜索导向矢量可以表示为


经过单元位置误差校正,处理后的第 m 个发射单元、第n 个接收单元、第p 个目标的信号可以表示为

4.3 等效幅相误差估计
等效幅相误差包括单元幅相误差、收发初相和发射时间同步误差,可以作为整体利用特征结构方法[15]估计,校正后的第 m 个发射单元、第n 个接收单元、第p 个目标的信号可以表示为


图2 基于中继的估计方法示意图
机载DCAR接收信号含有等效幅相误差时,单元位置误差的估计彼此相关,估计误差的偏差被不断传递放大,使得基于中继的估计方法性能严重下降。为此,给出一种单元位置误差和等效幅相误差的联合估计方法。首先,利用基于目标的估计方法估计单元位置误差,并利用特征结构方法估计等效幅相误差;其次,对接收信号仅校正等效幅相误差;然后,对校正后的信号利用基于中继的估计方法再估计单元位置误差;最后,对单元位置误差再次校正后的信号估计等效幅相误差,完成机载DCAR同步误差校正。
4.4 算法复杂度分析

5 仿真分析
由于尚未得到机载DCAR的实测数据,本节通过仿真数据验证所提同步误差校正方法的有效性。机载DCAR由若干部收发共置的单元雷达构成,载机飞行高度为8 km,单元雷达工作在L 波段,PRF选取为4 kHz,一个CPI内的相干脉冲数为128,信号带宽为4 MHz,采用多普勒分复用(Doppler Division Multiple Access, DDMA)波形作为MIMO模式下的发射波形,DDMA波形是一种特殊的ST-CDMA波形。
实验1考虑机载DCAR含有多种同步误差的情况。采用角反射器作为特显点,单元雷达和角反射器的位置如图3(a)所示,图3(b)和图3(c)给出了沿航向和垂直航向位置误差估计的比较结果,图3(d)和图3(e)给出了等效幅度和相位误差估计的比较结果,图3(f)给出了输出信号相位估计的比较结果。基于目标的估计方法和联合估计方法均准确地估计出了单元位置误差,而基于中继的估计方法未能准确估计。基于中继的估计方法估计得到的位置误差彼此相关,当存在等效幅相误差时,位置误差估计的偏差被不断传递放大,由于单元位置误差未能准确校正,后续等效幅相误差也不能准确估计,严重破坏了输出信号相位。基于目标级联特征结构的方法和联合估计方法均得到了等效幅相误差估计的准确结果,同步误差得到了校正,输出信号相位接近理想信号相位。由于联合估计方法使用了所有收发分量,而基于目标的估计方法仅使用了自发自收分量,联合估计方法的估计精度更高。

表1 算法时间复杂度比较
实验2考虑机载DCAR在不同条件下的目标相参合成性能,利用不同方法估计得到的同步误差,对机载DCAR进行同步误差校正,并实现目标相参合成。根据窄带条件,信号复包络缓变,可以利用基于SFT搜索的方法得到的特显点到单元雷达的距离(真实距离),以及特显点到估计的单元雷达的距离(计算距离)的时延差作为粗估计的时间同步误差。表2给出了不同估计方法粗估计的时间同步误差的比较结果(1号单元作为参考单元),无论是基于目标的估计方法,还是联合估计方法,时间同步误差的估计结果均和实际时间同步误差接近。
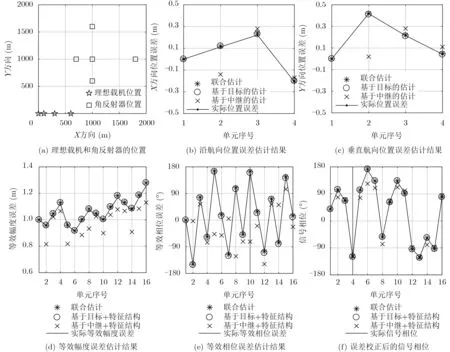
图3 含有多种同步误差情况的估计结果
经过时间、空间和相位同步误差校正后,在MIMO模式下对目标进行搜索,可以得到高精度的目标定位结果,进而实现目标相参合成。图4(a)给出了接收相参模式下不同方法目标相参合成性能的比较,图4(b)给出了该比较的局部放大结果,当机载DCAR存在同步误差时,目标信号输出功率产生损失,并且目标信号功率会向周围距离单元扩散,相比较于理想情况损失约12 dB。基于目标的估计方法和联合估计方法有效校正了时间、空间和相位同步误差,目标信号输出功率显著提高,接近理想输出。由于联合估计方法使用了接收信号的所有收发分量,联合估计方法的信号输出功率更高。

表2 不同方法估计的时间同步误差比较 (μs)
图5(a)给出了不同方法全相参合成性能的比较,图5(b)给出了该比较的局部放大结果,当机载DCAR存在同步误差时,全相参模式下未校正同步误差的目标信号输出功率产生严重损失,而所提的两种方法脉冲压缩后的目标信号输出功率接近理想输出,并且联合估计方法的信号输出功率更高。
6 结束语
为了实现机载DCAR的时间、空间和相位同步,本文提出了基于特显点的机载DCAR同步误差校正方法。该方法首先利用目标参数搜索方法消除滤波器网格失配误差;接着,选取不同的接收信号分量,将单元雷达作为目标或者中继,采用反向估计的思想得到单元位置误差;最后,利用特征结构方法估计等效幅相误差;同时,联合单元位置误差和等效幅相误差的估计方法得到了一种联合估计方法,提高了同步误差估计精度。仿真结果验证了本文方法的有效性。需要说明的是本文方法要求特显点的位置已知,对于特显点位置未知的情况,以及特显点排布方式对位置误差估计精度的影响,还需要进一步研究。
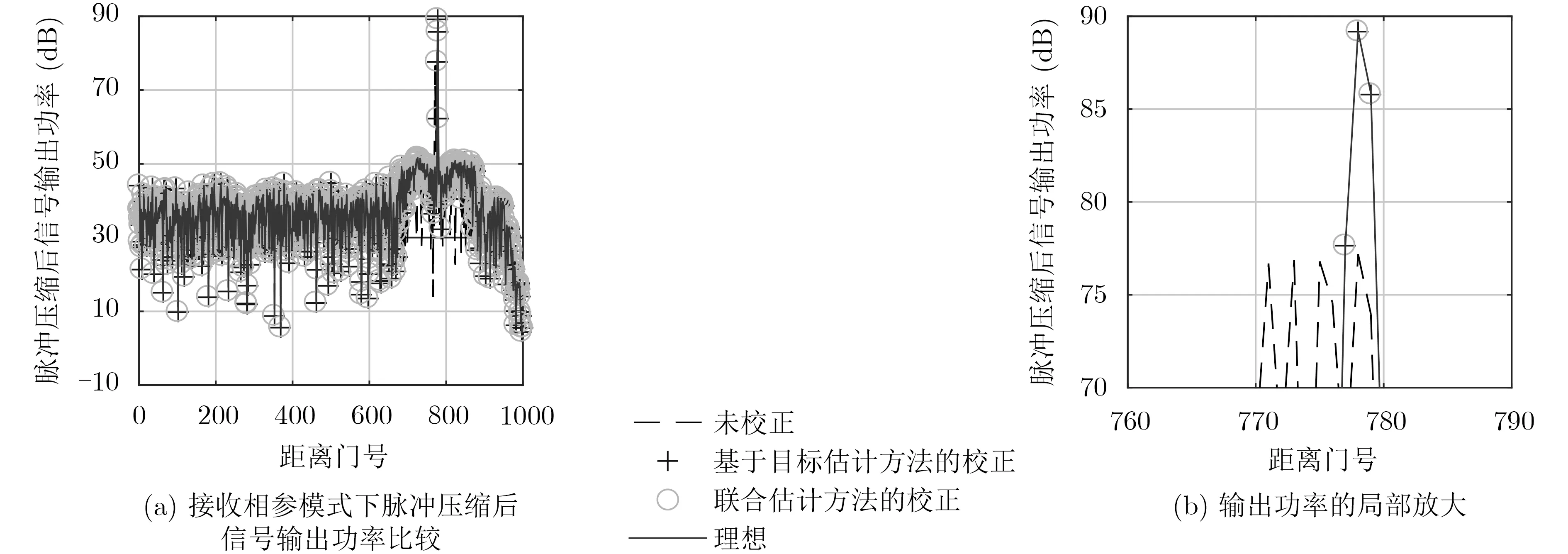
图4 接收相参模式下目标合成性能比较
图5 不同方法的全相参合成性能比较
