无刷双馈电机故障穿越策略
2021-03-17王一丁苏建徽汪海宁于鸿儒
王一丁,苏建徽,汪海宁,于鸿儒
(合肥工业大学 光伏系统教育部工程研究中心,合肥 230000)
0 引 言
近几年,无刷双馈发电机(brushless doubly fed induction generator,BDFG)因其取消了电刷和滑环,提高了系统的可靠性,同时继承了双馈发电机变频器容量仅需转差功率,功率因素可调等优点而受到了广泛关注和研究[1-5]。
目前,关于无刷双馈发电系统应对电网故障穿越缺少系统性的研究。随着无刷双馈电机的普及和并网准则的进一步完善,拥有应对各种故障穿越的能力也会逐渐成为对风电场的必然要求。目前,我国已有《风电场接入电力系统技术规定》、《风电机组高电压穿越测试规程》和《电能质量三相电压允许不平衡度》等标准。
文献[6]探讨了电网故障期间无刷双馈电机的暂态过程,并提出使用Crowbar电路或串联动态电阻器以提高发电机的低电压穿越能力;文献[7]分析了BDFG等效电路模型及电网电压跌落期间BDFG的暂态过程,提出一种不使用Crowbar电路的控制策略; 文献[8]研究了电网电压跌落期间BDFG输出有功功率和无功功率的变化,提出一种静态坐标系下基于磁链跟踪的低电压穿越控制策略;文献[9]对BDFG在不同类型的不平衡故障下的行为进行分析,提出一种故障时直接控制电流内环给定为0的控制策略;文献[10]分析了不平衡电网下BDFG的动态行为,提出一种基于比例积分谐振控制器(PI+R)的改进的矢量控制策略。
目前,对无刷双馈发电系统故障穿越的策略一般是引入撬棒电路、串联变流器等设备,或者设计控制策略应对电网故障从而不增加硬件设备。由于电网对称故障和不平衡故障时电机的动态性能、数学推导不同,大部分控制策略仅针对某一种故障穿越设计,如果应对多种电网故障策略切换较为复杂,对控制器资源也有负担。本文通过对无刷双馈电机控制侧等效模型分析以及对其阻尼特性的分析,引入虚拟电阻控制有效抑制电网电压对称故障时控制绕组过压和过流;电网不平衡时通过正负序坐标系分离控制消除控制目标中的负序分量,同时对正负序坐标系下控制器都引入虚拟电阻抑制振荡,避免对发电系统造成损害;控制系统简单有效。最后通过仿真和实验验证了该控制策略的可行性。
1.1 无刷双馈电机的数学模型
无刷双馈电机定子功率绕组定向模型如下[11]:
up=rpip+sψp+jωpψp,
(1)
uc=rcic+sψc-jωcrψc,
(2)
ur=rrir+sψr+jωprψr,
(3)
ψp=Lpip+Mprir,
(4)
ψc=Lcic+Mcrir,
(5)
ψr=Lrir+Mprip+Mcric。
(6)
式中:s是微分算子;u、i、ψ分别是无刷双馈电机三相电压、电流和磁链;r、L分别为电机各绕组电阻和电感;Mpr、Mcr分别是功率绕组、控制绕组与转子绕组之间的互感;ωr为编码器检测到的转子角速度;ωcr、ωpr分别是控制绕组侧和转子绕组在功率绕组旋转坐标系下的旋转速度,下标p、c和r分别指电机定子功率绕组、控制绕组和转子,各绕组角速度关系如下[12]:
ωcr=(pp+pc)ωr-ωp,
(7)
ωpr=ωp-ppωr。
(8)
式中pp和pc分别是功率绕组和控制绕组的极对数。
1.2 无刷双馈电机控制绕组等效电路
由于无刷双馈电机转子绕组短接,式(3)中ur=0,结合式(5)、式(6),可得
(9)
式中,s+jωpr远大于其他参数,其作为分母的项可以忽略,因此式(9)可写为
(10)
结合式(3)、式(4)、式(10),可得控制绕组电压
(11)
其中:
(12)
(13)


图1 控制绕组等效电路Fig.1 Equivalent circuit of control winding
忽略rp,可得
(14)
将式(14)代入式(11),可得
(15)
其中
sn=(ωp-ωcr)/ωp。
(16)
2.1 对称故障时电机瞬态分析
故障发生时间t=0,功率绕组侧电压对称突变程度h,则电压突变前后功率绕组侧电压为:
(17)
(18)
电网电压故障时,功率绕组的磁链不会突变,但其构成将发生改变,除旋转角速度为ωp的稳态分量外,还存在一个随时间不断衰减的暂态量,即
(19)
式中τp为定子时间常数。
电网电压故障时感应电动势为
(20)
当h=-1且sn最大时,控制绕组感应电动势的瞬态值最大,约为稳态情况时的4倍。这种情况下容易造成控制绕组过流,对机侧变频器造成损坏。因此,电网电压对称故障时的主要控制目标是对控制侧电流进行限流,保证电机能不脱网度过电网故障。可以考虑从抑制反电动势入手。Ec是反电动势,它影响了电流内环的动态性能。抑制Ec的影响,即可改善电网电压突变时机侧变换器的性能。
2.2 控制绕组电流内环控制器设计
由式(11)可得
(21)
根据式(21)可得无刷双馈电机电流内环控制结构如图2所示。
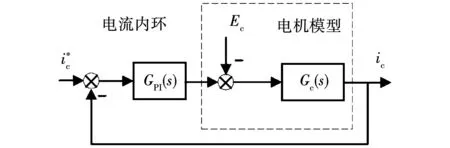
图2 电流内环控制结构Fig.2 Current inner loop control structure
PI控制器的传递函数
(22)
被控对象控制绕组电流的传递函数
(23)
并网时,使用功率外环分别控制有功功率和无功功率,当检测到电网对称故障时,控制器切换到故障穿越模式,根据电网规范注入无功电流。功率绕组侧有功电流被控制为零,无功电流被控制为功率绕组侧额定电流。故障结束后,电压检测器将触发控制器回到正常操作控制模式。
2.3 电流内环特性分析
建立以定子控制绕组电流dq分量为状态变量,控制绕组电压dq分量做为输入量的状态方程为
(24)
阻尼系数ζ和自然振荡频率ωn分别为:
(25)
(26)
由于rc的值远小于ωpr,阻尼系数ζ较小,接近于0,极点靠近虚轴,系统瞬态时间响应的振荡较强。为了抑制反电动势对系统动态性能的影响,提高ζ的值可以降低系统瞬态时间响应的振荡,ζωn的值越大,系统响应的衰减越快。可以从此方面考虑设计控制器。
2.4 引入虚拟电阻的电流内环设计
(27)
式(27)可通过图3所示的控制结构实现。
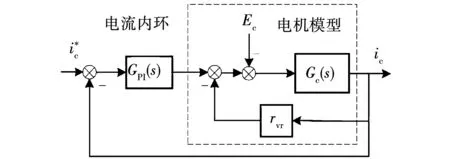
图3 引入虚拟电阻电流内环控制结构图Fig.3 Current inner loop control with virtual resistance
此时阻尼系数和自然振荡频率可以改写为:
(28)
(29)
加入rvr后,ζ和ωn的值均增大;系统特征根的虚部没有变化,实部减小,远离虚轴。此时,相当于在控制绕组侧串联电阻rvr,而控制绕组侧并没有实际存在,因此称为虚拟电阻控制。
由图2和图3分别可得增加虚拟电阻前后控制绕组电流对反电动势Ec的传递函数GE(s)和GE_vr(s)分别为:
(30)
(31)

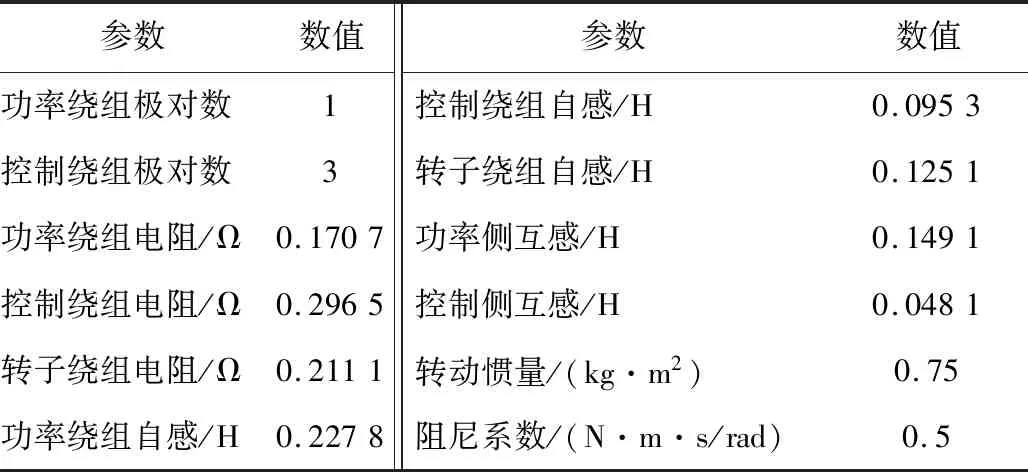
表1 无刷双馈发电机参数Table 1 Parameters of BDFG
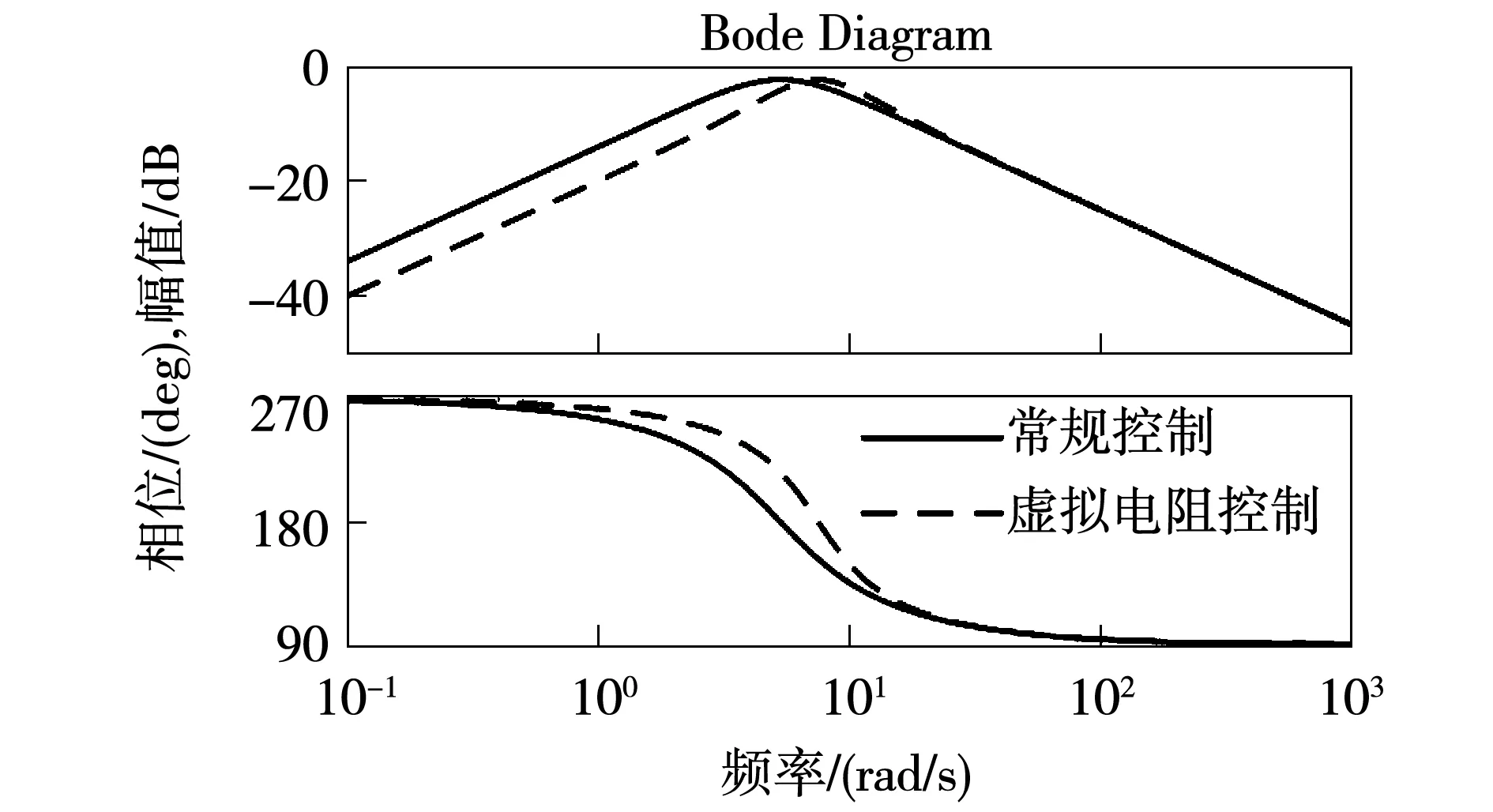
图4 控制绕组电流对反电动势传递函数伯德图Fig.4 Bode diagram of transfer function of control windings’ current to back EMF
引入虚拟电阻后故障穿越控制结构如图5所示。其中:下标dq是各电气量在功率绕转坐标系下的d轴、q轴分量;θr、θg、θcr分别为转子位置角、电网电压位置角、控制绕组位置角;Pp、Qp是计算出的功率绕组有功、无功功率值。电网电压正常时,发电系统采用功率绕组电压定向的控制策略,功率外环给定需要输出的有功、无功功率;检测到故障后,控制系统立刻切换到故障时的控制算法,根据并网规范输出无功功率支撑电网;电流内环控制器引入虚拟电阻抑制电网电压突变对电机造成的冲击。
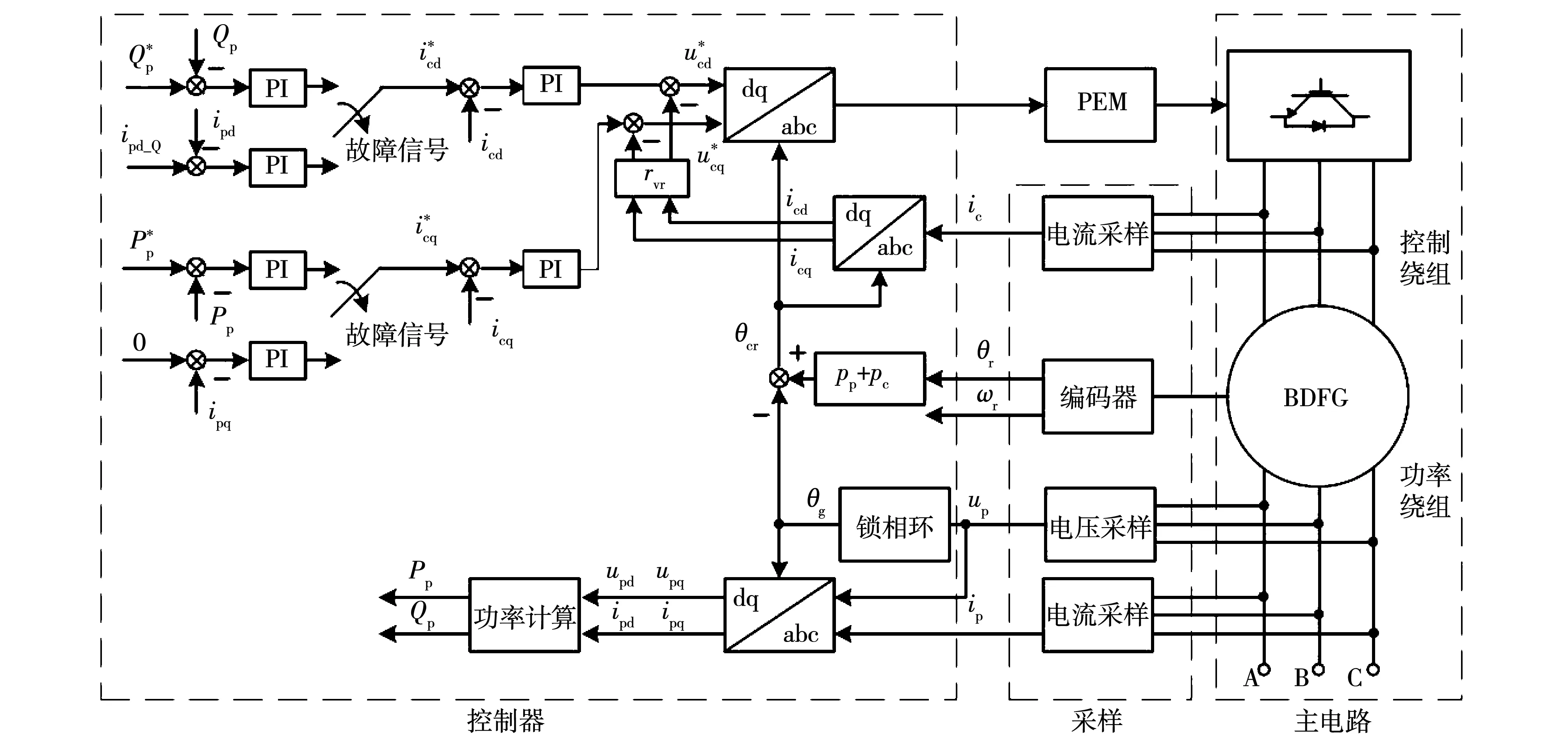
图5 引入虚拟电阻后对称故障穿越控制结构图Fig.5 Structure diagram of symmetrical fault ride-through control with virtual resistance
2.5 虚拟电阻值的选取
引入虚拟电阻后电流环传递函数可以写为
(32)
图6是虚拟电阻取值分别为0、3、5 Ω时Gic(s)对应的伯德图。可以看出虚拟电阻值越大,Gic(s)的截止频率越小,电流环的瞬态响应速度受到影响。
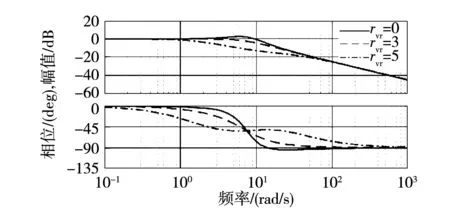
图6 电流环传递函数伯德图Fig.6 Bode diagram of Gic(s)
图7是虚拟电阻取值分别为0、3、5 Ω时开环传递函数对应的根轨迹图。当比例系数增大时,系统稳定裕度增大;虚拟电阻值增加时,自然频率减小。

图7 根轨迹图Fig.7 Root locus diagram
虚拟电阻值与控制绕组电流阻尼系数的关系如图8所示。随着虚拟电阻值的增大,阻尼系数随之增大。综合考虑,选取虚拟电阻值3 Ω。

图8 虚拟电阻值与阻尼系数关系Fig.8 Relationship between virtual resistance and damping ratio
当电网电压不平衡时,如果仍采用常规控制策略,则会给BDFG的运行带来不良影响如定子电流不平衡、转子电流畸变、有功功率脉动等[13]。通过从无刷双馈电机本身的控制入手,可以消除控制目标中的负序分量,抑制电网电压不平衡带来的影响。
3.1 正负序的检测和分离
由于发电机组通过三相三线制与系统相连,不存在零序分量。对于不平衡电网,可使用双坐标系对正序、负序进行解耦。双坐标系包括2个旋转坐标系:正序坐标系dq+以角速度ω逆时针旋转,角度为θ;负序坐标系dq-以角速度-ω顺时针旋转,角度为-θ。正负序坐标系和静止坐标系αβ关系如图9所示,图中X表示电气量。
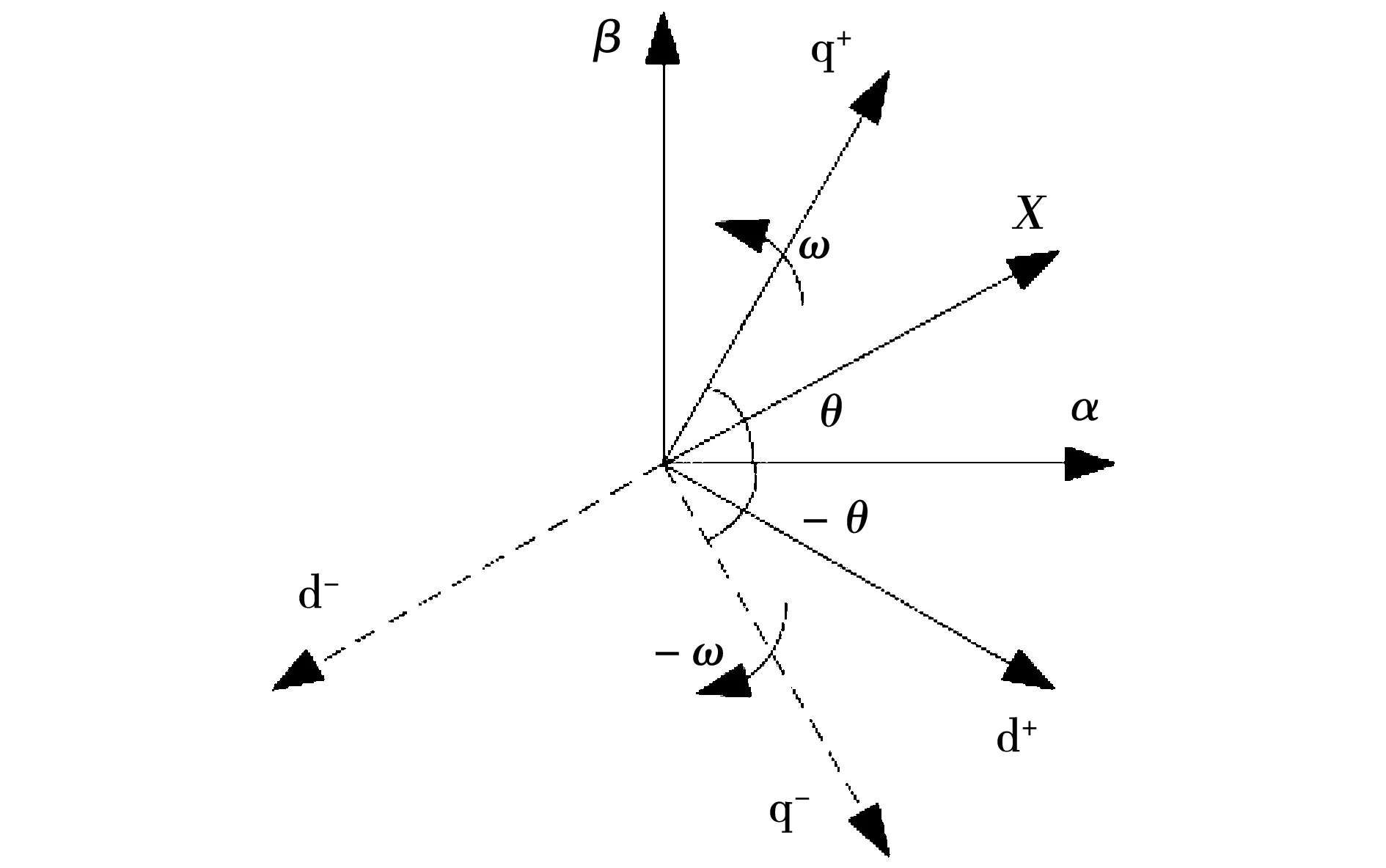
图9 正负序旋转坐标系Fig.9 Positive and negative sequence rotation reference frame
电气量在正序坐标系中表达为
(33)
式中上标+表示正负序旋转坐标轴,下标+、-表示旋转坐标轴中的正负序分量。可以看出,在正序坐标系下正序分量为直流量,负序分量为二倍频;同理在负序坐标系下,负序分量为直流量,正序分量为二倍频。
采用陷波器的正负序分离法原理如图10所示。将系统中不平衡的三相电气量经过坐标变换到正负序旋转坐标系下;对电网电压分离正负序的同时可以进行锁相,得到的是功率绕组dq+坐标系的旋转角速度ωp。
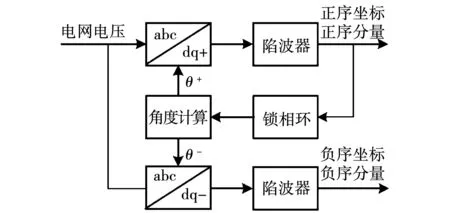
图10 正负序分离法Fig.10 Positive and negative sequence separation
正负序坐标系的角度为:
(34)
(35)
3.2 不平衡故障时电机瞬态分析

(36)
(37)

3.3 不平衡电网下控制策略


图11 不平衡电网下控制结构图Fig.11 Structure diagram under asymmetrical grid
为了验证算法的可行性,在无刷双馈发电平台进行实验,对上述控制策略进行了实验验证。发电平台使用变频器驱动三相异步电机模拟运行于风电场中的风力机,如图12(a)所示;变频器如图12(b)所示;使用一台电网模拟器模拟电网电压突变的情况,如图12(c)所示。为方便查看和对比,采集到的波形实验数据在MATLAB中储存并绘出。
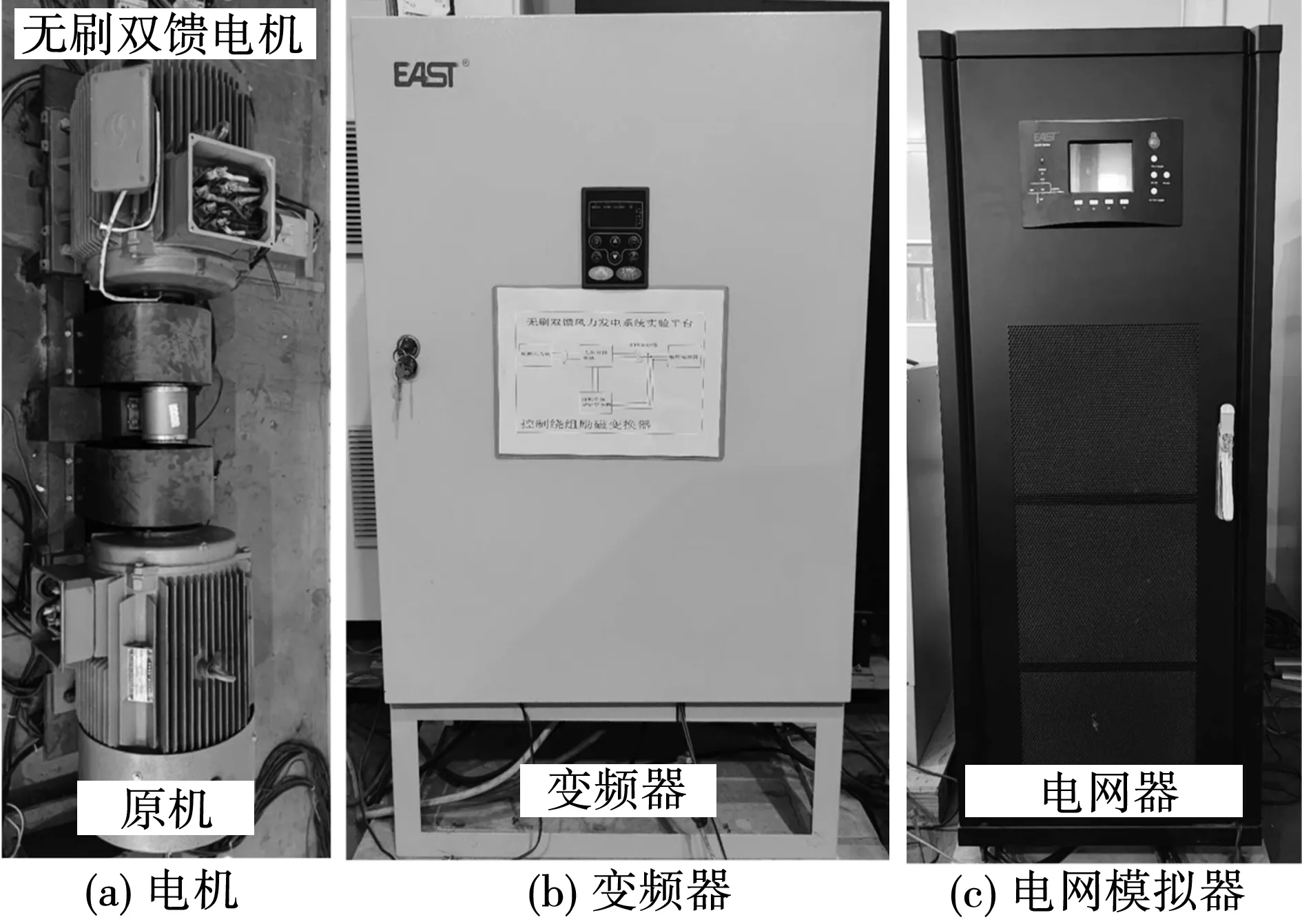
图12 实验系统平台Fig.12 Experimental system platform
4.1 对称故障
设置内环PI控制器的初始参数KP=0.2,KI=0.1,保证系统的稳定运行;外环PI控制器的初始参数KP=1,KI=5;电机运行在700 r/min。
电机额定功率5 kVA,功率绕组额定电压380 V,额定电流8 A。
图13和图14分别是常规控制和引入虚拟电阻控制后,电网电压突降至0,无刷双馈电机功率绕组侧相电压和相电流、控制绕组侧相电流的波形。
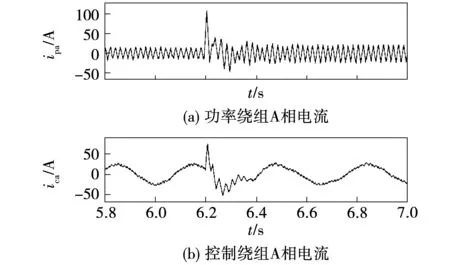
图13 常规控制时功率绕组电流和控制绕组电流Fig.13 ip and ic under conventional control

图14 虚拟电阻控制时功率绕组电流和控制绕组电流Fig.14 ip and ic under virtual resistance control
图15和图16分别是常规控制和引入虚拟电阻控制后,网侧电压突增30%情况下,无刷双馈电机功率绕组侧电压电流和控制绕组侧电流的波形。
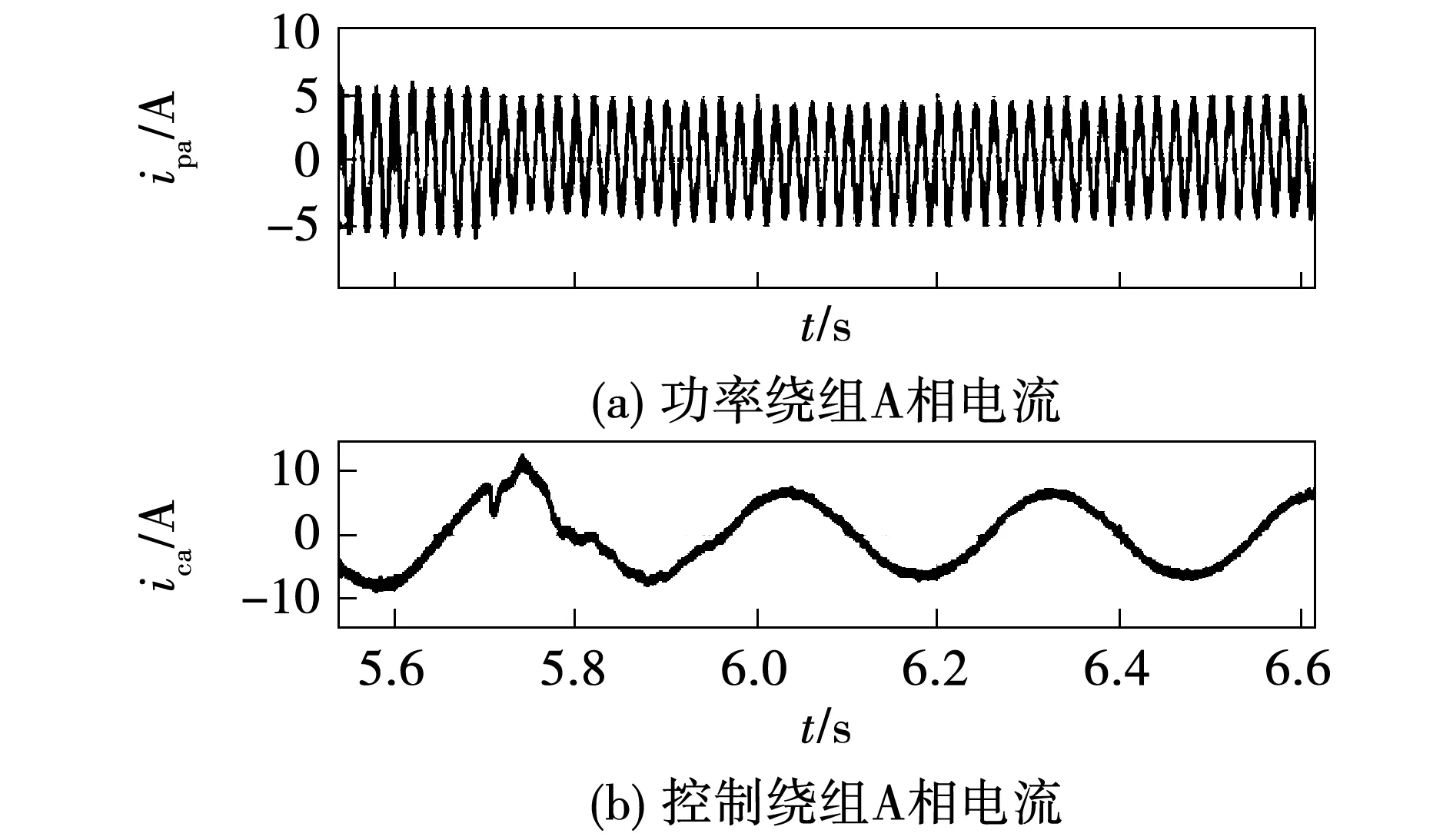
图15 常规控制时功率绕组电流和控制绕组电流Fig.15 ip and ic under conventional control
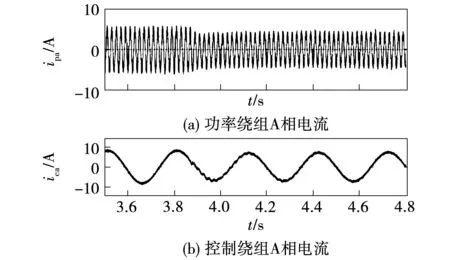
图16 虚拟电阻控制时功率绕组电流和控制绕组电流Fig.16 ip and ic under virtual resistance control
可以看出,相比传统控制,引入虚拟电阻控制后,控制绕组电流振荡的幅值被抑制且振荡时间缩短,抑制了电网电压对称故障过程中感应电动势瞬时值突增对系统的影响。
图17是电网电压骤升时功率绕组有功功率的波动情况。根据国标要求电压骤升30%情况下有功功率波动最大约为额定功率10%,80 ms后有功功率波动在额定功率5%以内,均满足国标要求。
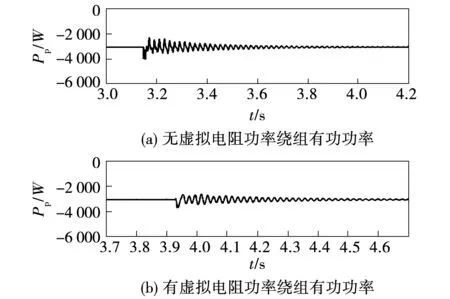
图17 功率绕组有功功率Fig.17 Active power of power winding
4.2 不平衡故障

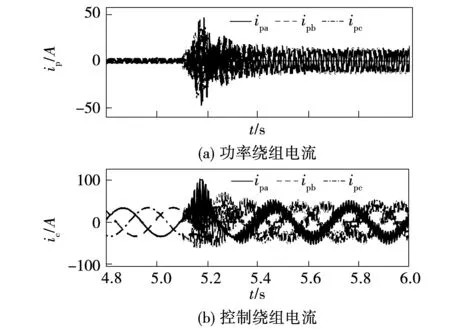
图18 常规控制下电网电压单相骤升功率绕组电流和控制绕组电流Fig.18 ip and ic under single-phase voltage swell of conventional control
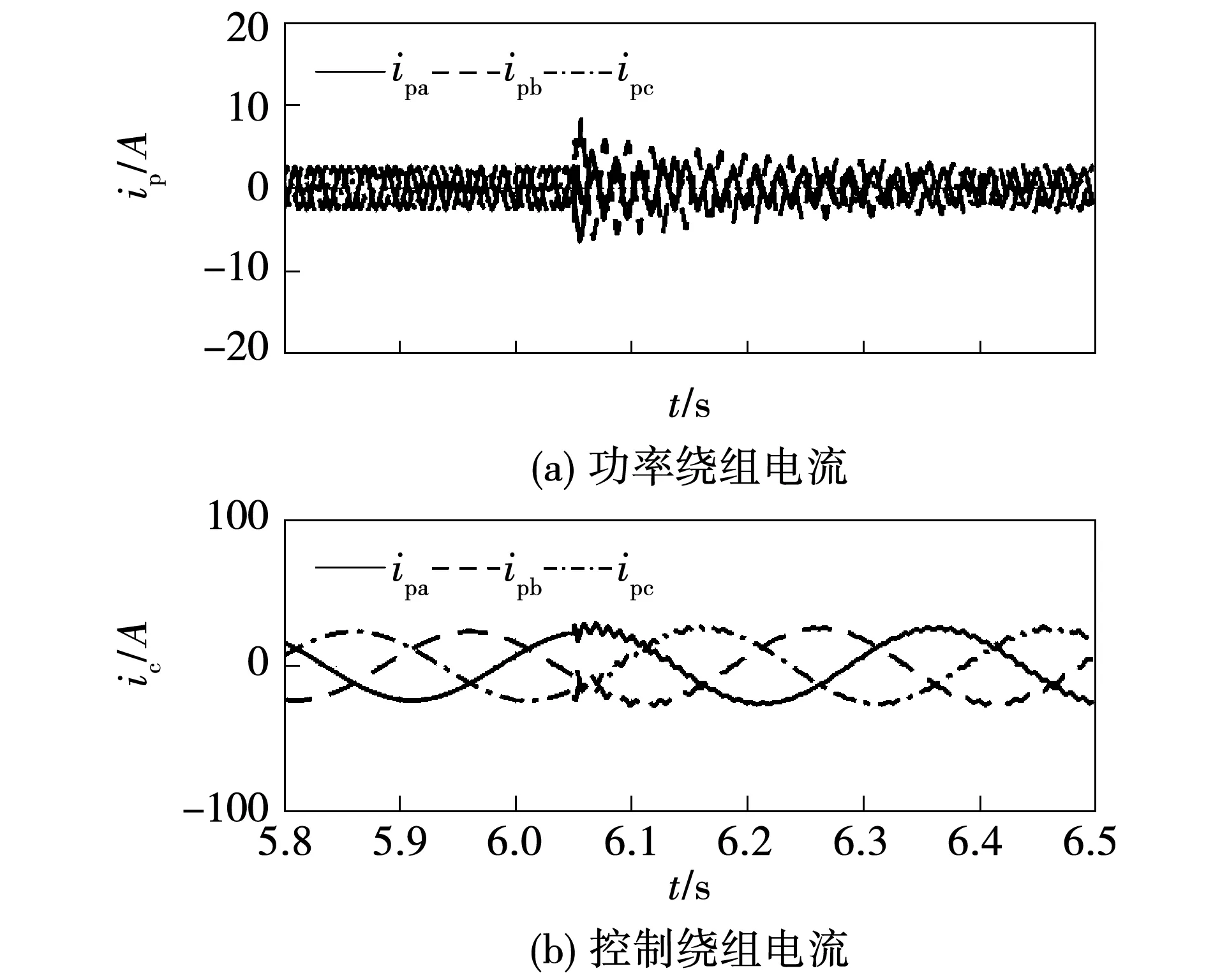
图19 正负序坐标系-虚拟电阻控制下电网电压单相骤升功率绕组电流和控制绕组电流Fig.19 ip and ic under Single-phase voltage swell of PNRF-VR control
图18和图19可以看出,故障发生时功率绕组电流负序分量骤升,使用常规控制无法消除。使用正负序坐标系-虚拟电阻控制策略后,功率绕组电流中负序分量被消除,功率绕组电流和控制绕组电流的振荡幅值和时间都受到了抑制。

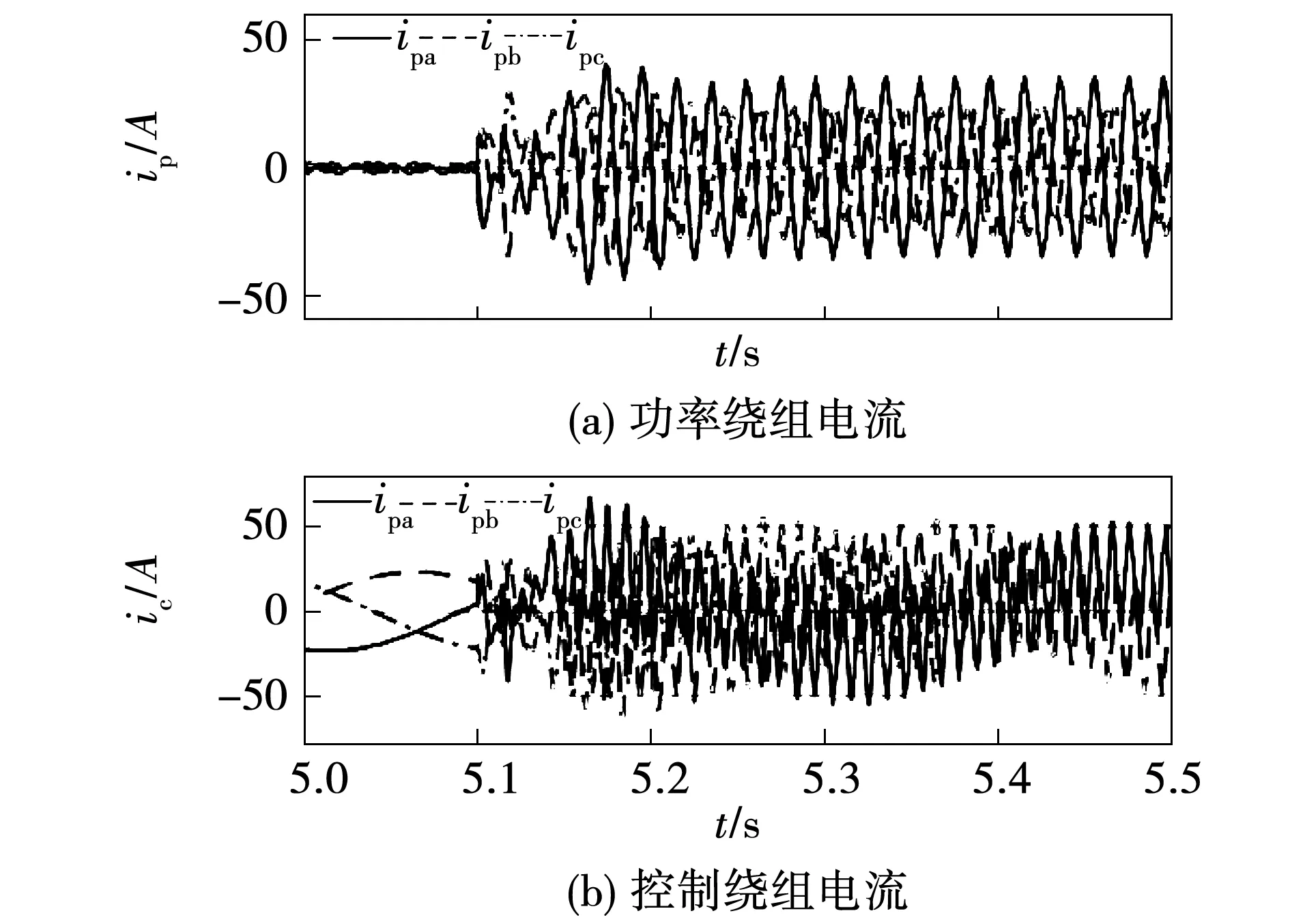
图20 常规控制下相间接地故障功率绕组电流和控制绕组电流Fig.20 ip and ic under p-p-n of conventional control

图21 正负序坐标系-虚拟电阻控制下相间接地故障功率绕组电流和控制绕组电流Fig.21 ip and ic under p-p-n of PNRF-VR control
故障发生后功率绕组电流出现负序分量,使用常规控制无法消除。使用正负序坐标系-虚拟电阻控制策略后,功率绕组电流中负序分量被消除,正序分量保持平衡。功率绕组电流和控制绕组电流的振荡幅值和时间都受到了抑制。
基于以上对无刷双馈发电系统应对故障穿越的研究,得出如下结论:
1)电流内环引入虚拟电阻控制,能够抑制电网电压对称故障引起的控制绕组电流振荡,加快系统响应的衰减。
2)对电网电压不平衡故障,使用正负序旋转坐标系可有效分解出电气量的正负序分量,使用虚拟电阻控制抑制故障发生时的振荡。实验表明,文中的不平衡控制策略能够有效实现不平衡条件下设定的控制目标。
3)应对不同故障的控制策略无需改变电流内环结构,控制结构简洁稳定。