基于主动安全的交叉频密路段冲突消解策略研究
2021-03-16沈伯昭张志清于海臣顾大鹏刘晓姗
沈伯昭,张志清,于海臣,顾大鹏,刘晓姗
(1.北京市国道通公路设计研究院股份有限公司,北京 100053;2.北京工业大学城市交通学院,北京 100124)
0 引言
2016-02-21中共中央、国务院发布的《关于进一步加强城市规划建设管理工作的若干意见》中提出:优化街区路网结构,树立“窄马路、密路网”的城市道路布局理念[1].在此背景下,北京、上海、重庆、广州、南京、太原、南阳等地积极响应,开始规划建设街口间距在100~200 m的“宜居街区”.
变密后的路网缓解了主路的交通压力,但大幅增加的交叉支路给“宜居街区”的行车安全带来很多隐患.频密的交叉支路,增加了冲突发生的可能性;行人、非机动车在小尺度的路口随意穿行,给行车安全带来隐患;为了方便过街,“宜居街区”多采用较小转弯半径,车辆经常由于视距不足无法及时发现前方支路来车,导致路口碰撞事故的发生.
交叉频密路段特殊的道路交通环境,使得以往的交通管控方式不再适用.主要有3方面:①“宜居街区”相交道路间距小,若设置信号灯,频密的信号管控不仅投入增大,且会大大降低路段的通行能力;②“宜居街区”支路车流量不大,若设置黄闪灯,较小的冲突概率以及过频繁的黄闪警示,极易使司机产生警觉疲劳,无法达到警示效果;③“宜居街区”人车混行严重,先进的车联网技术仅限于车-车间的相互协调,无法保证行人、非机动车的行车安全.
有效的交通安全防治不是事故发生后的补救,而是需要从根源上消解冲突.许多学者考虑将主动安全技术应用到行驶安全上,以避免事故的发生[2-3].Fuerstenberg[4]提出交叉口冲突预警系统,系统会实时向有车载的车辆触发冲突警告.Joyoung Leel等[5]提出交叉口车辆协同控制算法,试验表明该算法可有效减少停车次数和行程时间.明尼苏达州交通局在整个州的双车道公路停车控制交叉口安装了碰撞预警系统,证实交叉口冲突预警系统对驾驶员停车间隙选择和停车率有显著影响[6].Silvestri M[7]提出了交叉口冲突预警系统(ICWSs),得出冲突预警系统可帮助司机更早发现违规车辆,并采取更安全的制动策略来避免冲突.ZHU Tong等[8]提出通过判断概率是否大于某个阈值来决定是否发送预警.文献[9]提出了交叉路口中利用DSRC通信技术共享信息的车辆碰撞预警算法.文献[10]对车辆碰撞预警算法进行改进,提出了适用于变速的车辆协作式碰撞预警算法.文献[11-12]利用两车之间的相对速度与行驶方向来判断是否会发生碰撞.
从上述研究可知,通过车辆间的相互协调,可使交通系统资源被充分利用,大幅提升车辆通行安全和行车效率.但这些研究仅考虑了车-车冲突,且均需要车载系统的支持,我国车联网技术并未成熟,且行人、非机动车无法进入联网环境,仅靠车辆间的相互协调,无法保证交叉口的通行效率与行车安全.因此,本文应用主动安全的思想,研究交叉频密路段冲突消解策略,在确保安全的同时,减少交叉口延误,实现交叉口车辆的平稳运行.
1 冲突消解策略逻辑框架
冲突消解策略逻辑框架为:数据采集、环境感知、危险评估、决策执行(图1).具体步骤方法如下.

图1 冲突消解策略基本框架
1)数据采集.安装在交叉口两侧的数据采集设备实时采集主路和支路靠近交叉口车辆/行人的位置和速度信息.
2)环境感知.当在两条道路上同时检测到移动物体时,路车单元将计算车辆或行人到达冲突点所需的时间(TTC),确定车辆的冲突发生阈值.
3)危险评估.通过冲突发生阈值,评估车辆是否有冲突可能性.一旦预测到潜在的冲突,会启动计算道路的优先权算法,判定那条道路车辆具有优先权.
4)决策执行.依据路权分配结果,确定对主路还是支路发出预警信号.在算法确认道路安全之前,预警信号不会被解除.
2 冲突消解策略逻辑算法
2.1 数据采集
在主路支路两方向指定位置分别设置车辆检测器,如图2所示,实时检测主路和支路车辆、行人的速度及位置信息.为了量化车辆间的相对位置关系,以冲突点为原点,以主路为X轴,支路为Y轴,建立直角坐标系,并设定检测区域范围.

图2 冲突检测设备布设位置示意图
由图3几何位置关系可得:
X=L0cosφ+X0
(1)
(2)
式中:X为车辆距冲突点的距离;X0为检测器距冲突点的距离;H为检测器设置高度;φ为检测线与水平面间的夹角;L0为雷达检测线的长度.

图3 冲突检测设备结构形式示意图
由于检测器高度H=5.5 m,车辆检测范围LX∈(30 m,150 m),得检测线的水平距离L∈(35.43 m,155.10 m),由几何关系计算得,φ∈(2°,9°).
道路的检测区域为辐射场在道路上的投影区,按照雷达检测器放置高度H=5.5 m,对主路检测区域进行计算:带入β=7°,H=5.5 m,X0=-5 m,DX=3.75 m,X2=150 m,得θ=5.5°,X1=28.7 m,α=6°.因此,主路检测区域为距交叉口150~30 m范围.同理,得支路检测区域为距交叉口120~40 m范围.
2.2 环境感知
当主路和支路检测区域同时有车辆出现时,分别计算主路、支路车辆进出冲突区所需的时间.
1)到达冲突点时间(TTC)
假设车辆的速度按照减速度为0(匀速)~1.11(稳定匀减速)运行.设检测距冲突点X米处车辆速度为vx,X∈(30,150).
则,当按匀速行驶时,车辆到冲突点所需时间TTCn1为:
(3)
当按稳定匀减速行驶时,车辆到交叉口所需时间TTCn2为:
(4)
2)停车视距(SSD)
停车视距由反应距离S1、制动距离S2、安全距离S33部分组成[13].具体表达式见式(5).
SSD=S1+S2+S3
(5)
反应距离S1与制动距离S2的表达式如式(6)(7)所示.
(6)
(7)
式中:v为车辆运行速度(km/h);t为驾驶员的感知反应时间,通常为2.5 s[14];φ为附着系数,量纲为1,通常选取较差的潮湿路面,一般取值为0.31~0.44;ψ为道路阻力系数,量纲为1,ψ=滚动阻力系数f+道路纵坡度i.则,停车视距可表示为:
(8)
考虑到行车的安全性,S3取值为5 m.φ取值依据设计车速60 km/h,选取在路面潮湿状况下的摩阻系数,取值为0.33;坡度i按照平坡<3%计算.故对停车视距可进行简化.
SSD≈1.25v
(9)
据调查,交叉频密路段主路的行车速度为40~60 km/h,按照60 km/h计算,则主路车辆从看到障碍物起到安全停止所需的时间TSSDx=SSD3.6/60=4.5 s.
3)冲突危险区域定义
依据主路直行车辆和支路左转、右转、直行3种工况下车辆的运行轨迹,定义冲突危险区域为矩形ABCD,如图4所示.为了确保安全,扩大主路和支路的危险区域在最小安全距离S3外,并保证在支路车辆到达危险区域时,主路车辆距交叉口距离满足停车视距.

图4 交叉口冲突区域
4)进出冲突区时间
当预测到两车同时到达冲突区域时,就有可能发生冲突.车辆进入和离开冲突区所需的时间可通过式(10)(11)计算:
进入冲突区时间:
(10)
(11)
式中:Tx1、Ty1分别为主路和支路车辆到达冲突区所需时间;TTCx、TTCy分别为主路和支路车辆到达冲突点所需时间;Sc1为左转冲突区边界距冲突点的距离;S3为车辆间的最小安全距离,通常为3~5 m;W为车辆宽度,通常为1.6~1.8 m.
离开冲突区时间:
(12)
(13)
式中,Tx2、Ty2分别为主路和支路车辆离开冲突区所需时间;Sc2为右转冲突区边界距冲突点的距离;L为车辆长度,通常为3.8~4.3 m;δ为左右转偏差系数,取值为0~3 s.
2.3 危险评估
当两方向车辆进出冲突区所需时间满足以下两中情况时,车辆有发生冲突的可能性:
1)Tx1≤Ty1≤Tx2
主路车辆先到达冲突区域,在支路车辆到达冲突区域时,主路车辆未能完全离开.其计算公式为:
(14)
(15)
即,当主路和支路车辆速度位置关系满足式(15),即认为有冲突发生的可能性.
2)Ty1≤Tx1≤Ty2
支路车辆先到达冲突区域,在主路车辆到达冲突区域时,支路车辆未能完全离开.其计算式为式(16):
(16)
取δ=3 s,SSD=1.25vx,化简得冲突发生阈值计算公式:
(17)
当主路和支路车辆速度位置关系满足式(17)时,即认为有冲突发生的可能性.
通过简化和整合式(15)(17),得到冲突发生阈值公式为:
(18)
当满足式(18)时,两方向车辆有冲突的可能性.
2.4 决策执行
决策执行即当确定两方向车辆有冲突可能性后,判断对主路还是支路车辆进行预警.首先需要对道路优先权进行计算.
总结交叉口冲突车辆间的时空分布情况,主要有以下3种可能性:
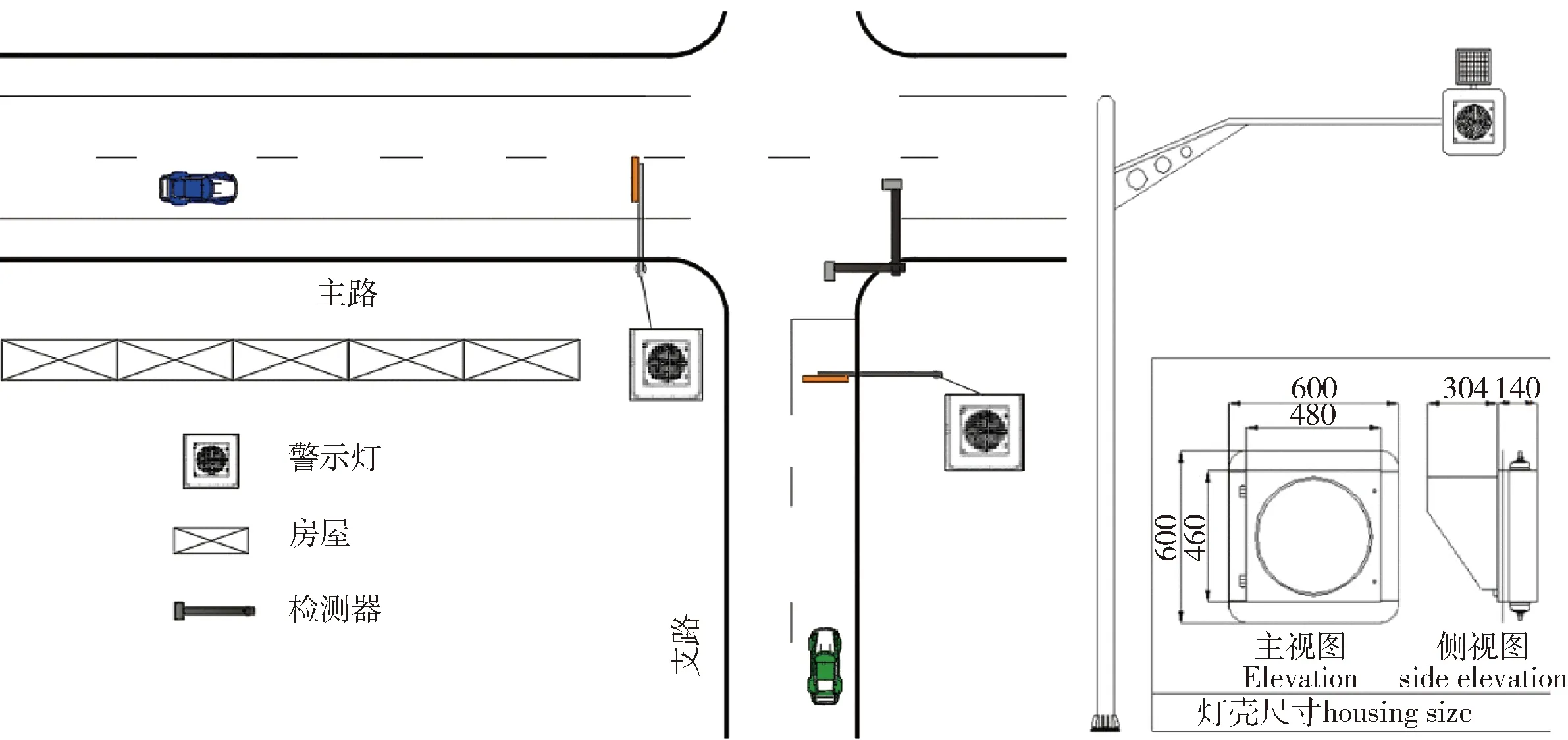
图5 交叉口警示灯布设位置及结构示意图
1)主路车辆先到达冲突区域
车辆到达冲突区时间关系满足式(19):
TTCx1-TTCy1<0
(19)
该情况为主路车辆优先,需要对支路车辆进行预警,使支路车辆提前减速,以避让主路来车.
2)支路车辆先到达冲突区域,但不满足穿越主路的临界间隙
车辆到达冲突区时间关系满足式(20):
0 (20) 式中:Tc为支路车辆可穿越间隙,为了保证安全,定义以左转车辆穿越交叉口所需可穿越间隙5.77 s作为临界间隙[15]. 该情况为主路车辆优先,需要对支路车辆进行预警,使支路车辆提前减速,以避让主路来车. 3)支路车辆先到达冲突区域,且满足穿越主路的临界间隙 车辆到达冲突区时间关系满足式(21). TTCx1-TTCy1≥Tc (21) 该情况为支路车辆优先,需要对主路车辆进行预警,使主路车辆提前减速,以避让前方来车. 综上,分别得主路和支路优先权判定公式: TTCx1-TTCy1 (22) Tc (23) 即当主路和支路车辆到达冲突区时间满足式(22)时,主路车辆具有优先权;当满足式(23)时,支路车辆具有优先权. 主路和支路分别设有带感应黄闪警示灯,如图5所示.依据路权分配结果,对没有优先权的道路发出预警信号.通过路口警示灯传递给没有优先权道路的车辆,该方向警示灯启亮并持续闪烁,提示驾驶员前方路口将有车驶入,需谨慎行驶;当判断路口无冲突风险后,警示灯关闭,驾驶员可放心通过路口. 为了确保算法在不同冲突工况下的可靠性,采用CarSim &Simulink联合仿真,对主路和支路车辆不同紧急工况下的冲突避让情况进行仿真验证. 3.1.1 CarSim仿真 1)建立道路仿真模型.依据实际调查数据,在CarSim道路建模中分别对道路平面线形、纵断面线形、横断面线形以及路面摩擦系数进行设定,设置摩擦滚动系数为0.85、滚动阻力值为1. 2)建立车辆仿真模型.本实验路段为交叉频密路段,建好道路模型后,依据具体调查情况选取不同车型,设置车辆的几何尺寸,并完全仿真真实车辆的动力学状况对车辆的刹车油门功效以及ABS防抱死系统进行设定. 3)建立驾驶员仿真模型.在CarSim仿真软件中,用预瞄时间来反应驾驶员的这种提前感知的特性.设定预瞄时间为1.5 s,反应时间为0.15 s.在无预警条件下,驾驶员刹车最大制动加速度范围控制在[0,1.11];在预警条件下,驾驶员刹车制动加速度趋势采用通过驾驶模拟实验得出的交叉频密路段交叉口速度预测模型[16],使其反映真实状况下驾驶员对预警信号的车速变化状态. 3.1.2 Simulink控制 通过CarSim的“Send to Simulink”,将CarSim的所有信息封装在S-Function中导入到Simulink,并在其中建立控制器,将2节提出的冲突消解策略转换成Simulink 逻辑图(图6),通过控制不同工况下车辆的刹车油门力度,仿真驾驶员的冲突决策过程. 图6 Simulink逻辑图 3.1.3 CarSim &Simulink联合仿真 将Simulink输出的由速度预测模型确定的刹车油门力度导入CarSim中,通过三维动态分析,遍历各种冲突情况,全面验证逻辑算法的准确性. 本次实验的仿真场景,设定了2种不同的驾驶环境: 1)场景1:无预警逻辑环境.主路支路两方向车辆分别以恒定速度从指定位置出发,交叉口无预警设施. 2)场景2:启动预警逻辑环境.主路支路两方向车辆分别从指定位置出发,主路车辆依据风险评估结果确定是否采取减速措施,刹车力度由速度预测模型控制. 实验假定主路车辆从距离冲突点150 m处出发(X=150),主路支路车辆的初始速度分别为30、40、50、60 km/h,根据2节提出的冲突发生阈值式(18),计算出不同车速下,支路车辆的起点位置.表1统计了冲突阈值的边界情况(Ymin,Ymax)和最危险情况(Ydanger)下,支路车辆的起始位置.通过CarSim &Simulink联合仿真,验证有、无预警逻辑下,驾驶员是否可及时避让冲突. 对上述所列的冲突发生阈值的边界情况以及最危险情况进行了逐一实验分析. 设定在0 s时,主路车辆正以60 km/h的速度,经过距交叉口150 m的位置;支路车辆正以30 km/h速度,经过指定的位置,以满足如下情况: 1) 最危险情况:两车如不采取任何减速措施,将恰好在冲突点发生碰撞. 场景1:主路车辆保持初始速度并在9 s时与支路车辆发生碰撞,如图7(a)所示. 场景2:路权判定结果是对支路预警.支路车辆收到预警信号,依据速度预测模型进行油门竞争,采取了提前减速停车措施,主路车速度不改变,如图7(b)所示,两车最小距离增加到9.5 m,避免了碰撞. 表1 支路车辆发车位置确定 m 图7 最危险情况仿真结果 图8 冲突阈值左边界仿真结果 2) 冲突阈值的左边界:两车如不采取减速措施,支路车辆恰好满足穿越条件,安全驶过. 场景1:支路车辆先抵达冲突点.如图8(a)所示,两辆车之间的最小距离为45.4 m,两辆车没有碰撞风险. 场景2:路权判定结果是对主路预警.主路车辆收到预警信号后,开始采取提前减速措施.当主路车辆速度还未显著减小时,支路车辆已经到达路口,警告信号被解除.因此,该预警对主路车辆的速度未造成显著影响,如图8(b)所示. 3) 冲突阈值的右边界:两车如不采取任何减速措施,主路车辆恰好安全驶过交叉口. 场景1:主路车辆先抵达冲突点,两辆车之间的最小距离为7.2 m,没有碰撞风险,如图9(a)所示. 场景2:路权判定结果是对支路车辆预警.支路车辆收到预警信号后,开始采取减速措施.在速度降低到13.2 km/h时,主路车通过交叉口,预警信号解除,支路车辆加速安全驶过交叉口,两车间的最小距离为13.9 m.该预警信号未对支路车辆造成显著交叉口延误,如图9(b)所示. 图9 冲突阈值右边界仿真结果 从仿真结果可看出,在冲突发生阈值的边界条件(Ymin和Ymax)下,即使没有预警,两车也不会相互碰撞.因此,在冲突阈值以外,可保证主路和支路的运行安全.同时,在最危险情况下(Ydanger),预警信息发出后,驾驶员可及时安全的避让冲突,同时保证速度不发生急剧变化. 以上述方式,对所有可能的冲突工况进行一一验证.实验结果显示,冲突消解逻辑算法可识别假设条件下几乎所有潜在的冲突,保证交叉频密路段的行车安全.同时,该算法可保证主路车辆的通行效率,减少刹车次数及交叉口延误. 本文结合交叉频密路段支路流量小、小间距街区交叉路口多的特点,提出了基于主动安全思想的冲突消解策略,研究成果具有较强的实用特性,为从智慧交通层面解决“宜居街区”的交通安全问题提供了理论基础和可行方案. 1) 提出包括数据采集、环境感知、危险评估以及决策执行4部分的冲突消解逻辑框架. 2)基于车辆主动安全思想,定义冲突危险区域,并通过预测车辆进出冲突区的时间,量化交叉频密路段冲突发生阈值. 3)充分考虑人因及环境因素,确定包括冲突阈值计算、车辆路权判断以及预警信号发出3部分的冲突消解策略,并确定具体计算流程及方法. 4)通过CarSim &Simulink联合仿真测试了不同预警设施、不同冲突紧急情况下的车辆运行状况.实验表明,所提出的算法能消解假设条件下所有潜在的冲突,保证交叉频密路段的行车安全性,减少不必要的交叉口延误. 本文提出的冲突消解策略弥补了小间距街区交叉口安全设计方面研究的不足,有较强的实用特性,为从智慧交通层面解决“宜居街区”的交通安全问题提供了可行方案.3 冲突消解策略实验验证
3.1 实验方法

3.2 实验场景
3.3 分析结果




4 结论
