基于GALJP滤波器的迟滞特性建模与补偿控制
2021-03-15孙思维毛雪飞黄梦琦刘向东李震
孙思维,毛雪飞,黄梦琦,刘向东,李震
(1.北京理工大学自动化学院,北京100081;2.中国农业银行,北京100005)
压电陶瓷致动器是一种特种电机,具有输出力大、速度快、稳定性好、位移精度高的优点,被广泛应用于高精度微纳米电气传动系统中,如超精加工机床的微动定位系统[1]、快速倾斜镜[2]、高速扫描探针显微镜[3]等。但是在实际应用中压电陶瓷致动器存在迟滞非线性的特性会影响控制精度,所以研究压电陶瓷控制器的模型和控制方法有重要的意义。
现有对压电陶瓷的迟滞模型研究主要有通过迟滞现象解释的Preisach模型[4],Prandtl-Ishlinskii(PI)模 型[5],Bouc-Wen模 型[6],神 经 网 络 模型[7],最小二乘支持向量机模型[8],以及段相似模型[9]等。还有基于物理原理进行解释的Maxwell等模型。Presisach等模型通过对压电陶瓷的迟滞特性产生的现象进行解释,并且取得了较好的拟合效果,因此被广泛应用。在这些模型的基础上,可以对压电陶瓷致动器进行迟滞逆补偿控制、前馈-反馈逆补偿控制[10]等,具有良好的控制效果。然而,在实际控制中,控制系统会受到环境变化和扰动等的影响,使用固定的逆模型控制器的控制效果无法达到预期,因此文献[11]提出了FIR滤波器来实现自适应的逆控制,针对系统的动态特性和干扰进行自适应控制,得到了较好的控制性能。但是直接使用自适应滤波器逆控制的效果仍不太理想,所以文献[12]提出基于Backlash的自适应滤波器,通过使用Backlash算子代替延迟算子,由于Backlash算子具有记忆历史输入的能力,提高了迟滞建模能力。
但是现有的自适应滤波器建模和逆补偿控制存在模型复杂、运算速度慢、收敛速度慢的问题,因此本文提出基于Backlash算子的GAJLP滤波器建立自适应迟滞模型及逆补偿控制器。该滤波器采用正交算法构建,综合了梯度格型滤波器与自适应FIR滤波器的优点,所以GALJP滤波器不涉及反馈引起的稳定性问题。并且相较于经典的自适应FIR滤波器,该滤波器最突出的优势是:GALJP滤波器是由多节相同的正交单元级联,其结构高度模块化,在实际工程应用中,能够非常方便地调整GALJP滤波器的阶数,并能用较低的阶数达到很好的建模和控制效果。
1 基于Backlash的GALJP滤波器迟滞模型
1.1 Backlash算子
Backlash算子的传输特性见图1。
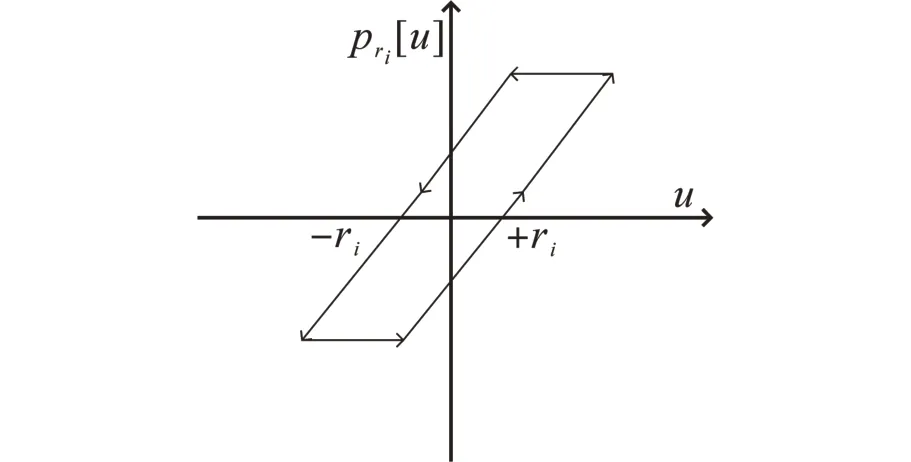
图1 Backlash算子的传输特性Fig.1 Transmission characteristics of the Backlash operator
Backlash算子在t时刻的输出pri[u(t)]满足下式:
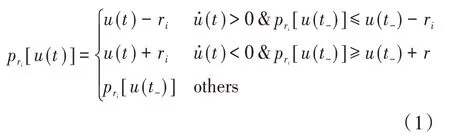
式中:u(t)为t时间的输入;ri为第i个Backlash算子的阈值;pri[u(t-)]表示算子的输出信号与之前相同。
可将式(1)写为离散形式:

式中:Δu(k)为k时刻与前一时刻的差。
1.2 基于Backlash算子的自适应格型滤波器
梯度格型滤波器的基本正交单元结构如图2所示。可将其首尾串联组成不同阶的梯度格型滤波器。

图2 梯度格型滤波器的基本正交单元结构Fig.2 Basic unit structure of the gradient lattice filter
在k时刻的m阶梯度格型滤波器的基本正交单元的计算公式为

梯度格型滤波器正交基本单元有如下性质:
1)后向预测误差bm(k)相互正交。即E[ bi(k)·bj(k)]=0,i≠j,说明正交单元的前、后级不存在耦合关系。各级的最优化等价于整个系统的最优化。
2)前向预测误差fm(k)与时移前向误差fm(k±l)正交,其中1≤l≤m-i,i<m。
3)前向预测误差fm(k)与输入的互相关函数等于后向预测误差bm(k)与被延时的输入互相关函数。
4)各阶前向预测误差fm(k)不正交。

按照伯格方法,反射系数的更新公式为

式中:β为更新系数,一般采用固定的更新系数对反射系数进行更新。
将多个如图2格型滤波器基本正交单元的延迟算子更换为Backlash算子组成基于Backlash算子的梯度格型滤波器得到图3所示结构,其中M为基本正交单元的个数,wm表示第m阶GALJP基本正交单元输出的权值。
GALJP滤波器基本单元的计算公式为

式中:bm(k)为前一阶后向预测误差bm-1(k)经过Backlash算子所得到的输出,其计算公式见式(1)~式(2)。
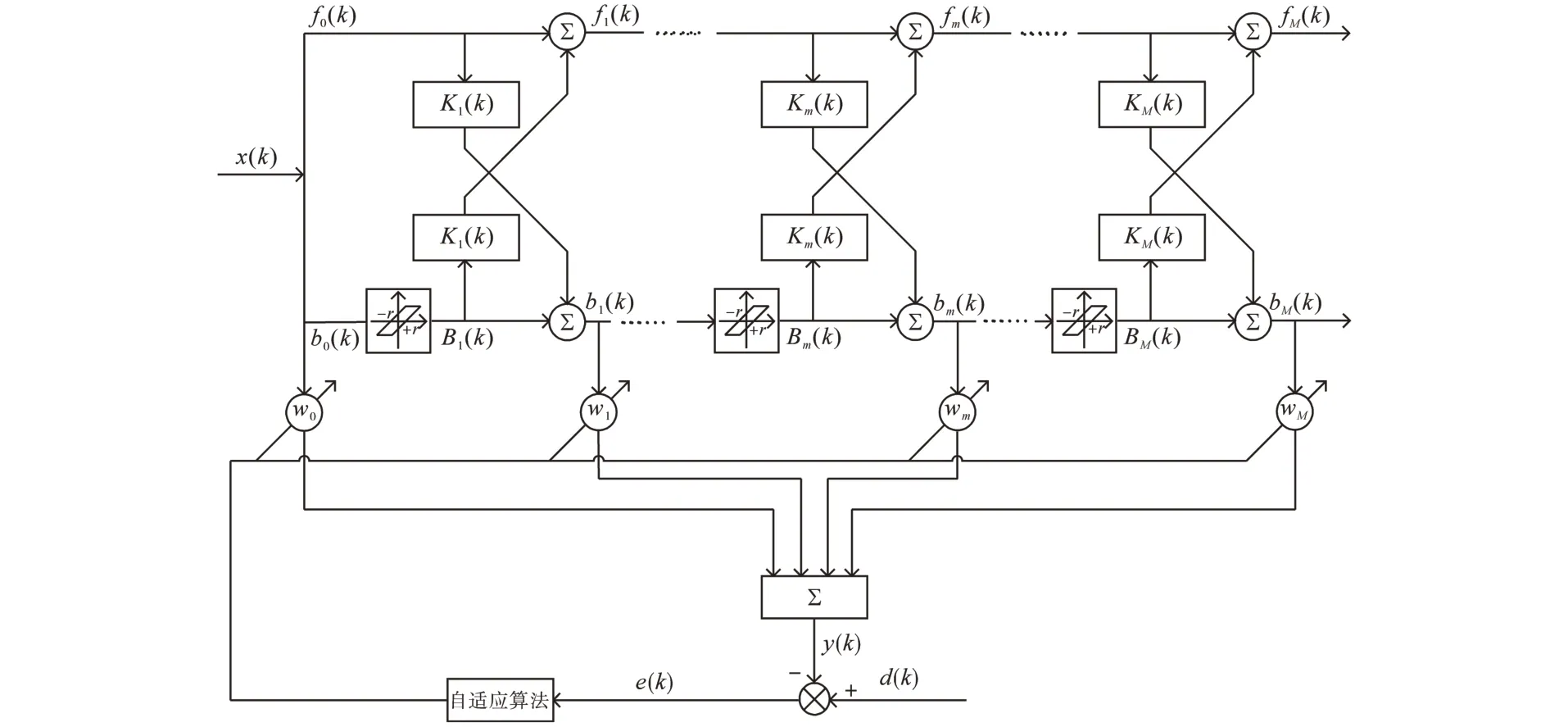
图3 基于Backlash算子的GALJP滤波器结构Fig.3 GALJP filter structure based on Backlash operator
在计算前后向预测误差之后对反射系数进行更新:

将GALJP滤波器的各级后向预测误差及权值组成向量形式:

k时刻GALJP滤波器的输出为

式中:b i as为一消除系统在初始时偏置量,可以提高系统的动态性能。
根据实际的输出位移信号d(k)可计算GALJP滤波器的误差为

在自适应建模和控制过程中可使用最小均方(least mean square,LMS)的方法结合GALJP滤波器的误差来动态更新权值,从而来自适应系统变化。但是如果使用固定步长更新,需要同时考虑自适应系统的适应速度和准确度,在此可采用归一化的最小均方(normalized least mean square,NLMS)方法,其步长的计算公式为

式中:α为控制步长的常数,通过后向预测误差向量X(k)来自适应调整步长;γ是为了防止系统出现X(k)=0的情况而增加的一个较小的常量。
最后GALJP滤波器的权值和偏置更新公式为

2 迟滞模型实验验证
为了对提出的迟滞模型进行验证,本文采用基于MPT-1JN/RL002型号的压电致动器实验平台进行验证,其输入电压范围为-30~150 V,位移最大为16μm,内置分辨率为2.5 nm的电阻式应变片传感器。
实验装置结构框图如图4所示,实验装置通过使用半实物仿真平台LINKS_RT向驱动电源发送控制信号,由驱动电源将驱动电压作用到压电致动器,最后将压电致动器内部电阻应变片传感器的位移信号返回至半实物仿真平台做进一步的信号处理。

图4 压电致动器实验装置结构框图Fig.4 Structural block diagram of experimental device for piezoelectric actuator
在对压电致动器使用GALJP滤波器进行建模时,需要确定滤波器系统的阶数M,所以需要对比不同阶数的建模性能。本文使用如图5所示的衰减正弦波信号作为输入电压信号,通过传感器得到输出位移信号,在线使用输入输出信号在不同阶数GALJP滤波器进行迟滞建模。迟滞建模的框图如图6所示。

图5 衰减正弦波输入电压信号Fig.5 Attenuates the sine wave input voltage signal

图6 GALJP滤波器的压电致动器迟滞特性建模框图Fig.6 Block diagram for modeling the hysteresis characteristics of piezoelectric actuators based on GALJP filters
实验中,设置Backlash算子的阈值为1,并且将输入输出信号标准化到[-1,1],初始反射系数Km(0)=0,前后向预测误差初值fm(0)=bm(0)=0,反射系数更新步长β=0.001,初始输出权重为W(0)=[0.005 0.005…0.005]T,初始偏置bias(0)=-1。使用不同阶数的GALJP滤波器来对压电致动器迟滞特性进行建模,表1为实验的误差结果,图7为误差对比,本文选取平均绝对误差eav和均方根误差RMSE两个指标对迟滞模型的性能进行定量描述。
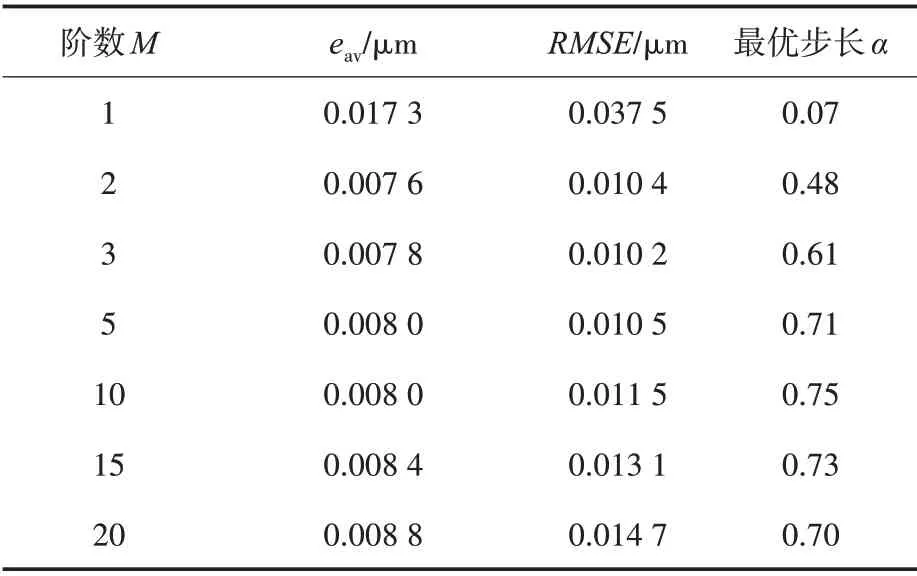
表1 不同阶GALJP滤波器的压电致动器迟滞建模误差Tab.1 Modeling error of piezoelectric actuators with different order GALJP filters

图7 不同阶数GALJP滤波器的压电致动器迟滞建模误差Fig.7 Modeling error of piezoelectric actuators with different order GALJP filters
根据建模得到的结果,1阶的误差最大,2阶的误差降到最低,之后随着阶数的增大误差逐渐增大。综合自适应滤波器的建模性能和计算时间,选择阶数为2的GALJP滤波器结构进行迟滞建模。
为了对提出的建模方法性能进行更好地说明,使用不同频率的12μm等幅正弦信号对GALJP滤波器迟滞建模和PI迟滞建模方法进行对比。其中PI模型的算子数为20,通过初载曲线确定算子的权重。两种建模方法对压电致动器迟滞特性的建模误差可见表2,从结果可以看出,在各种频率信号下,GALJP滤波器有着更高的建模精度。

表2 压电致动器迟滞建模方法均方根误差对比Tab.2 Comparison of root mean square error of hysteresis modeling methods for piezoelectric actuators
3 GALJP滤波器补偿控制器
在GALJP滤波器结构的基础上建立图8所示的压电致动器补偿控制系统。在设计GALJP滤波器补偿控制器时,选用从上一节中对比得到的2阶GALJP滤波器结构,并且使用相同的初始参数来实现对压电致动器的自适应迟滞补偿控制。由于在实际控制过程中会存在不同的控制参考信号,所以采用随机正弦波和随机三角波作为参考信号来验证跟踪性能。图9、图10为实验结果。

图8 基于GALJP滤波器的压电致动器控制系统框图Fig.8 Block diagram of piezoelectric actuator control system based on GALJP filter
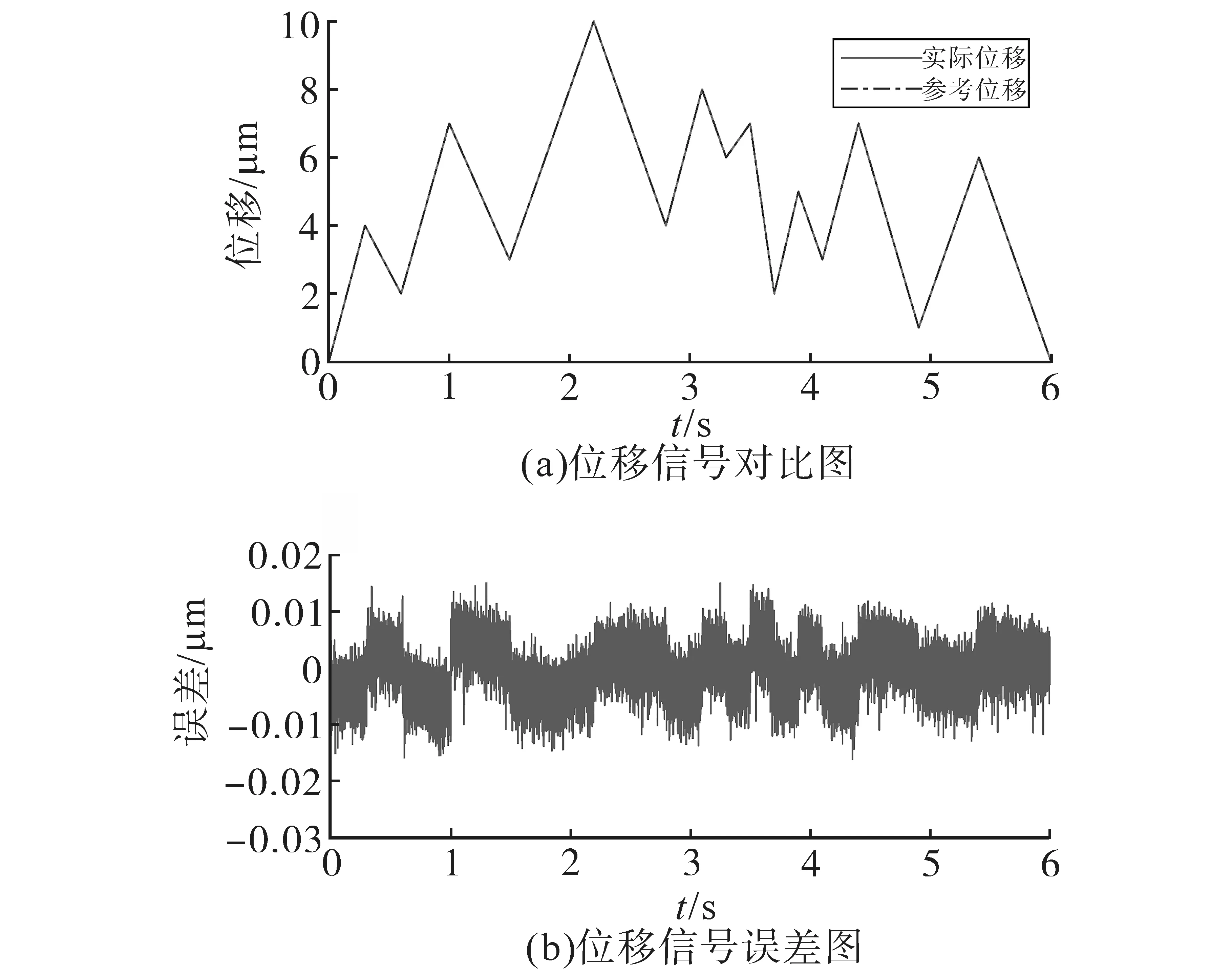
图9 随机三角波信号作用下GALJP滤波器补偿控制压电致动器实验结果Fig.9 Experimental results of GALJP filter compensation control of piezoelectric actuators under random triangle wave signal

图10 随机正弦波信号作用下GALJP滤波器补偿控制压电致动器实验结果Fig.10 Experimental results of GALJP filter compensation control of piezoelectric actuators under random sine wave signal
从实验结果可以看出,无论是随机正弦波信号还是随机三角波信号作为参考信号下,均有较好的跟踪效果,其误差范围在±0.02μm以内,均方根误差分别占总行程的0.023 8%和0.026 2%。
为了更好地展示所提出控制方法的性能,使用PID控制器和GALJP滤波器迟滞补偿控制器在不同频率的10μm等幅正弦参考信号作用下进行对比实验。其中PID控制器采用增量式的方法,具体参数为:Kp=0.5,Ki=0.1,Kd=0。
两种对压电致动器跟踪控制方法的误差对比结果如表3所示。
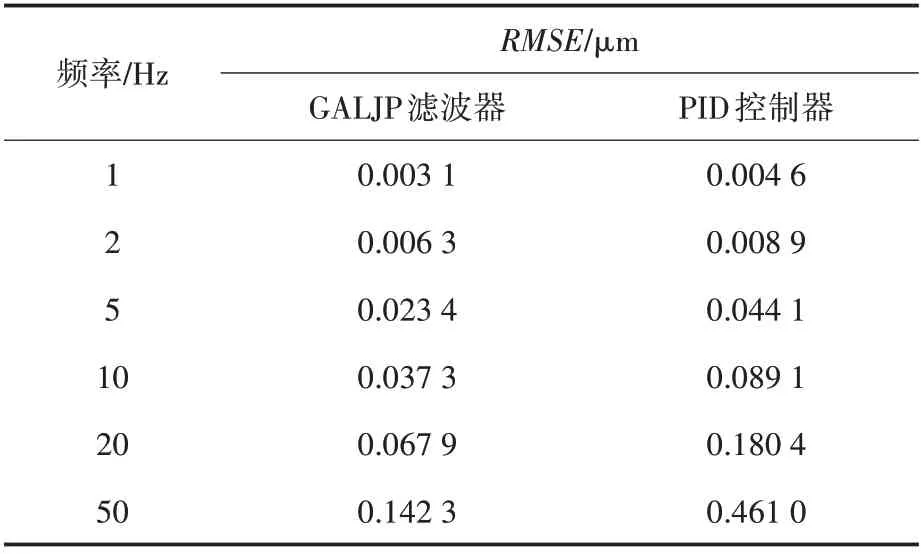
表3 压电致动器控制方法跟踪均方根误差对比Tab.3 Comparison of tracking RMSE of control methods for piezoelectric actuators
从实验结果可以看出,GALJP滤波器补偿控制方法在不同频率下均表现出更好的跟踪性能,并且在50 Hz下的精度约为PID控制器的3倍。但是由于迟滞特性与输入信号的速率相关,所以随着信号频率提高,其误差也相应增大,相应的解决方法会在以后做进一步的研究。
4 结论
为了降低压电陶瓷致动器迟滞特性的不良影响,本文提出了一种基于Backlash算子的GALJP滤波器用于对压电致动器进行建模和迟滞补偿控制。首先通过使用不同阶数的GALJP滤波器来对衰减正弦波信号进行建模,综合建模精度和计算时间,选择阶数为2的GALJP滤波器进行建模,其均方根误差为0.010 4μm。然后使用阶数为2的GALJP滤波器进行迟滞补偿控制,在随机正弦波信号和随机三角波信号作用下均有较好的控制效果,并且在不同频率等幅正弦参考信号下跟踪效果均优于PID控制器。本文的研究可为高精度微纳米电气传动系统的研究提供参考。
