基于Thevenin模型和自适应卡尔曼的SOC估算研究
2021-03-15王顺利邹传云李建超
李 欢,王顺利,邹传云,李建超,谢 伟
(1.西南科技大学信息工程学院,四川 绵阳 621010;2.绵阳市产品质量监督检验所(国家电器安全质量监督检验中心),四川 绵阳 621010;3.四川华泰电气股份有限公司,四川 遂宁 629000)
0 引言
荷电状态(state of charge,SOC)[1]主要用来表示电池的剩余容量,是指电池以一定放电倍率放电后,电池剩余容量与相同条件下额定容量的比值[2]。通过已知的剩余容量可以规划出电池的使用策略,从而通过调整电压、电流的方式,实现锂电池以最佳工况运行和达到最长使用寿命的目标。因此,荷电状态的实时准确估算将对电池管理提供显著的帮助。然而,锂电池本身内部结构复杂,荷电状态自身受放电电流、自放电效应[3]、内部温度、外部环境温度和电池自身老化等各种复杂因素的影响,使得精确估算SOC值变得十分困难。目前,SOC估算方法有安时积分法[4]、开路电压法[5]、神经网络法[6]、卡尔曼滤波[7]等。
本文以三元锂电池为试验研究对象。为了更加精确地描述电池工作特性,建立基于Thevenin的锂电池电路模型,采用自适应卡尔曼算法对锂电池进行SOC估算,并将其估算结果与扩展卡尔曼进行比较,分析其优势。
1 理论分析
1.1 等效电路模型
为了更好地描述电池的迟滞效应[8],并且考虑到电池极化效应[9]和自放电效应,本文将应用Thevenin模型[10]为等效电路模型。该模型结构精简,其中阻容并联电路刚好能表征电池的动态特性,参数辨识的难度适中,完全能满足对电池等效模型的精度要求。模型中只有一阶电阻-电容(resistor-capacitance,RC)电路,结构简单、运算量小。这在后期算法移植过程中能降低处理器的负荷,提高算法的运算速度,也是保证系统监测的快速性、实时性和稳定性的重要因素。Thevenin模型电路结构如图1所示。
根据所选的Thevenin模型,以放电方向作为正方向,极化电容两端电压令为up,Thevenin中的基尔霍天电压定律(Kirchhoff voltage law,KVL)关系如式(1)所示。根据KCL,可得式(2)。
UL=UOC-UP-Roi
(1)
(2)
解式(2)的微分方程,可得到up随时间的变化关系式:
(3)
假设某一时段电流为0,对应于电池的搁置状态,即电路为零输入响应。此时,需要给up一个初始状态up0,则式(3)可变形为:
(4)
假设up的初始状态是0,电路为零状态响应,式(3)可变形为:
(5)
将式(4)和式(5)离散化,可得到UP的递推形式:
(6)
(7)
而从式(6)和式(7)的个离散递推的形式可知,式(6)只是式(7)在电流为零时的一种特殊情况,所以最终Up的离散化形式就是式(7)。离散形式的状态方程和输出方程很适合进行算法迭代与程序实现,为之后的算法研究提供了可靠的依据。
1.2 参数辨识
对于Thevenin模型来说,需要辨识的参数有欧姆内阻Ro、极化内阻[11]Rp和极化电容[12]Cp。这几个参数都需要通过试验辨识得到。这里选择三元锂电池进行试验,电池的标称容量为72 A,实际容量为68 A。在27 ℃时,对电池进行混合动力脉冲能力特性(hybrid pulse power characterization,HPPC)试验。通过分析电池在工作过程中工作特性,获得电池模型参数。脉冲测试曲线(SOC=0.9)如图2所示。
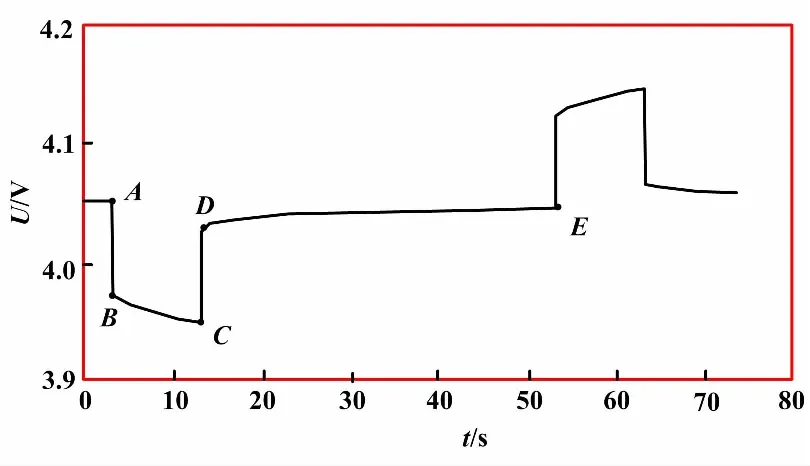
图2 脉冲测试曲线(SOC=0.9)
图2同时反映了锂离子电池的暂态特性和稳态特性。脉冲放电开始时,电池电压会瞬间下降,然后在放电期间电压随时间缓慢下滑。在放电结束瞬间,电池电压又立刻回弹,搁置期间电压有逐渐回升并趋于平稳的趋势。充电的过程与放电过程电压的响应情况正好相反。从图2中取A、B、C、D、E五个点。取点的依据是:从Thevenin等效模型来看,放电开始电压的突然下降是由于欧姆内阻Ro的作用,同样放电结束电压的迅速回升也是Ro的作用;放电过程中电压逐渐下降的现象可以用Thevenin模型中的RC电路解释。所以从AB段和CD段可以得到电池欧姆内阻参数值,从BC段和DE段可以得到RC电路的极化内阻和极化电容。由此可以得到参数的计算公式。Ro计算公式如式(8)所示。
(8)
式中:ΔUAB为AB段的电压差;ΔUCD为CD段的电压差;I为放电电流。
分析DE段电压响应,对应Thevenin模型的零输入响应。由式(4)和模型KVL关系得到以下方程组。
(9)
式中:UA为点A处的电压,即当前阶段的开路电压;以D点为零时刻,则从点D到点E的时间为tE-tD;UD和UE分别为点D和E处的电压。解方程组得到如式(10)所示的时间常数τ的计算式。
(10)
得到时间常数τ之后,只需计算出Rp或者Cp中的一个参数,另一个就可以由式(11)推算出。
τ=RPCP
(11)
BC段的电压响应对应于Thevenin模型的零状态响应。由式(5)和模型KVL关系得到的方程组如式(12)所示。
(12)
式中:UC为点C处的电压;以B点为零时刻,则从点B到点C的时间为tB-tC。
解方程组得到极化内阻RP的计算式如式(13)所示。
(13)
取得每个阶段脉冲试验中的关键点,使用式(8)、式(11)、式(13)就可以直接计算出Thevenin模型中的Ro、RP和CP参数值,最后得到每个SOC点处的模型参数。
1.3 自适应卡尔曼算法
普通的卡尔曼滤波对于噪声值通常是固定的,这与实际工况下噪声的统计特性不符合,易受噪声的影响而导致滤波结果不准确。为了解决该问题,本研究在普通卡尔曼的基础上增加了一个对噪声统计特性的估计。通过测量数据yk对噪声的均值qk、rk和方差Qk、Rk进行实时估计。k为离散时间;离散化采样周期Ts=1 s。再根据实时更新的均值和方差,修正当前的状态估计值,以提高算法精度、规避发散现象。过程噪声wk和测量噪声vk的均值为E[wk]=qk、E[vk]=rk,方差分别为D[wk]=Qkδkj、D[vk]=Rkδkj。过程噪声和测量噪声互不相关,且qk、rk、Qk和Rk未知。通过本滤波算法对其进行估计,进而更加精确地估计锂电池SOC,步骤如下所述。
首先,对系统进行初始化,令k=0,则有初始状态的估计值x0和初始状态误差的协方差Po如式(14)所示。
(14)
接着,由(k-1)时刻的状态和误差协方差矩阵,对k时刻不确定性的状态和误差协方差矩阵进行时间更新。计算过程如式(15)所示。
(15)

然后,计算卡尔曼增益矩阵Kk如式(16)所示。
(16)
若当前状态估计不确定性很高,Pk会增大,Kk也会相应变大,导致系统大幅度的更新状态。此外,如果环境噪声很大,则Pk-1变大,使Kk变小。进而采用测量数据对下一时刻状态的估计量以及误差协方差进行更新,其表达式如式(17)所示。
(17)
下一时刻的状态估计等于该时刻状态的先验估计与一加权修正项之和。其中,E为单位矩阵。由于测量值所提供的新信息,状态的不确定性通常会不断地减小,即Pk为不断变小的过程量。最后,采用测量数据不断地在线估计噪声的均值以及方差,使用更新后的状态不断地替换当前的状态估计值,实现对估计状态量和噪声的统计量的交替更新。
(18)

由以上分析可知,在线对qk、rk、Qk和Rk进行实时估计,达到对状态变量SOC估计值的不断修正,从而实现自适应修正作用,以此提高SOC估计精度。
2 试验及结果分析
根据试验步骤,对锂离子电池进行HPPC测试。从原始数据中抽出所有的电压数据,绘制HPPC测试试验过程中锂离子电池端电压的变化情况。HPPC测试试验电压响应曲线如图3所示。从图3可以看出,电池电压在放点结束后经过长时间搁置会逐渐趋于平稳。这表示其内部的化学反应和热效应已基本达到平衡。

图3 HPPC测试试验电压响应曲线
从整体过程数据中提取出有用的数据段,根据参数辨识的步骤对不同SOC阶段的欧姆内阻R、极化内阻RP、极化电容Cp、开路电压Uoc进行计算。各SOC状态下的模型参数如表1所示。

表1 各SOC状态下的模型参数
每次放电结束搁置后的电池基本处于稳定状态。此时的电压就是与当前SOC所对应的开路电压(open circuit voltage,OCV)值。从表 1可以看出,Thevenin模型内部参数随着SOC的变化在一定范围内波动。若需要得到较精确的模拟结果,就需要得到各参数和SOC之间的关系。
将辨识的参数通过Simulink模型进行仿真,对其输出的端电压和在同样输入电流情况下锂离子电池的实际端电压数据进行比较,由此评估模型中参数辨识的有效性和准确性。如果偏差较大,说明参数辨识不够准确,或者考虑模型本身的准确性是否存在缺陷。辨识参数输出电压与真实输出电压对比曲线如图4所示。

图4 辨识参数输出电压与真实电压输出对比曲线
由图4(a)可以看出,模型输出端电压与实际值有较好的吻合性,说明了Thevenin等效电路模型的合理性,也证明了参数辨识方法的可行性和可靠性。
从图4(b)可以看出,在整体过程中模型没有发散现象,误差出现较大的地方是在动力脉冲测试阶段。其原因是电池输入电流突变引起电池内部化学反应集聚增强,导致端电压迅速变化。这时Thevenin模型并不能十分完美地表现出锂离子电池的响应效果,但是其误差在可接受的合理范围内拨动,即使在SOC很低的最后阶段,模型不能很好地反映电池此刻状态的情况下,最大误差也没有超过0.02 V。由此可以验证Thevenin模型的精确性。
3 仿真结果分析
为验证自适应卡尔曼滤波(adaptive Kalman filter,AKF)算法对锂电池SOC估算的可行性,构建锂电池SOC估算模型。在多种工况试验条件下,对模型的估算精度、估算过程中的收敛性以及对于真实数据的跟踪性进行研究。
3.1 恒流放电工况
为验证AKF算法的估算精度和有效性,通过Matlab/Simulink建模,在恒流放电工况进行仿真。为增加工况的复杂度,在仿真程序特意设定了搁置阶段,以测试算法在工况突变情况下的稳定性。恒流放电工况仿真结果如图5所示。对比在相同的工况下扩展卡尔曼滤波(extemded Kalman filter,EKF)和AKF跟随的效果和误差。
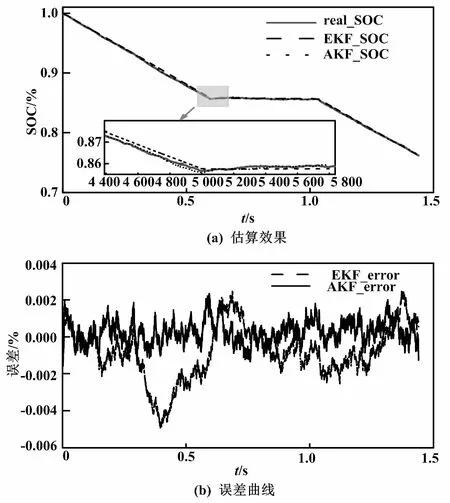
图5 恒流放电工况仿真结果
由图5(a)可以看出,AKF和EKF有着非常好的滤波效果,在工况突变的情况下,也没有太大的偏移,能够不断跟随真实值的变化。从图5(b)可以看出,两种算法都具有相当高的精度。其中:AKF算法误差一直控制在0.2%以内,EKF误差的最大值在0.4%左右。值得注意的是,AKF算法在工况突变的情况下误差依然处于稳定状态,而EKF算法在两个突变位置误差都有较大的波动。通过对比可知,在此工况下,AKF相对于EKF拥有更高的精度,且在面临工况突变情况下具有更高的稳定性。
3.2 BBDST工况
考虑到电池在实际应用环境中处于动态工况下运行,为验证AKF算法在复杂工况下跟随的效果和精度,使用北京公交动态测试(beijing bus dymamic streat test,BBDST)工况对算法进行仿真。该工况是对北京公交车进行真实数据采集得到的,具有更高的复杂性,满足电池动态工况测试。BBDST工况仿真结果如图6所示。

图6 BBDST工况仿真结果
从图6中可以看出,EKF和AKF对真实值都有良好的跟随效果。为了更加清晰地对比跟随效果,截取了局部放大图,如图6(b)和图 6(c)所示。其中,图6(b)为仿真初期,能够清晰看出两者对于真实值的跟随趋势都是非常准确的。但AKF算法估算值比EKF更加靠近真实值。这是因为EKF的噪声始终固定的,而在实际的动态工况中噪声的统计特性是多变的。AKF算法能够根据环境的变化自适应地调整噪声,以减小误差。图6(c)为仿真末期,相对于仿真初期,误差略为增大。这一方面是由于误差的累积效应,另一方面是因为在放电末期电池的非线性增强。然而,总体误差都是不大的,如图6(d)所示,AKF算法误差一直维持在0.1%以内,相比EKF的0.2%以内,提高了一倍的精度。这说明了AKF算法在锂电池SOC方面的优越性。
4 结论
精确的SOC估算是锂电池状态检测的关键技术。本研究基于锂电池特性分析确立Thevenin等效电路模型,通过HPPC试验对模型关键参数进行辨识,将辨识值与真实值导入Simulink模型进行对比,验证了Thevenin模型的准确性。在此基础上,运用自适应卡尔曼滤波算法,进行SOC状态估算,在恒流工况和BBDST工况下对算法进行试验仿真。试验表明,无论是在恒定工况,还是在动态工况,AKF算法都具有相当迅速的响应能力和精度。在电动汽车频繁启停的复杂工况下,将EKF估算误差从0.2%降至0.1%,使误差控制在相当小的范围,提高了EKF算法滤波的收敛性和稳定性,验证了AKF算法的实用性。
