最少拍电流控制在海口动车牵引系统中的应用
2021-03-12岳学磊许克磊
岳学磊,高 闯,许克磊
(西安中车永电捷通电气有限公司 技术中心,陕西 西安 710016)
0 引 言
目前,在大功率交流电力机车的牵引传动系统中,牵引电机主要采用异步电机。异步电机具有结构简单、可靠性高、维护少、价格低、易于制造、过载能力强(仅受定子绕组热时间常数的影响)等优点[1-2]。
定子电流环控制在牵引异步电机矢量控制系统占有非常重要的地位,直接关系牵引控制系统的转矩控制快速性和系统稳定性。然而,在大功率牵引传动系统中,为了降低功率模块开关损耗和减少散热,牵引逆变器的开关频率通常较低,只有几百赫兹,但开关频率的降低、数字信号处理过程的采样速率下降造成的延迟,将会对电流控制器的动态性能造成不利影响,特别是在励磁电流与转矩电流中引入了严重的交叉耦合,而常规PI控制器改善耦合的能力有限[3-6]。
文献[3]在复矢量分析方法的基础上建立包含延时影响的离散数学模型(永磁同步电机),并采用最少拍系统设计方法确定电流调节器。仿真和现场试验结果表明,该电流调节器具有较好的稳态及动态性能。文献[7]全面分析了异步电机耦合因素,结合零极点对消原理提出一种改进型离散电流控制器,在离散时间域下,不仅确保电流环系统具有良好的动态响应,而且可以实现定子电流转矩分量与励磁分量的有效解耦,并通过仿真和试验验证了改进型离散电流控制器的有效性与可行性。文献[8]为了实现良好的解耦控制,基于复矢量分析方法建立了更加精确完整的电机模型,提出一种电压解耦控制的电流控制器,在此基础上引入了延时及其补偿方法,并通过复矢量传递函数对控制策略的动态解耦性及鲁棒性进行了研究。仿真和试验结果表明所提方法有效提高了电机动态控制性能。
本文针对动车牵引逆变器的开关频率较低,常规电流PI控制器性能较差的问题,根据复矢量法分析方法,建立了包含延时影响的最少拍电流控制器。通过Simulink仿真及在海口动车线装车进行试验,验证所提策略的有效性。
1 异步电机离散数学模型
对于电压型逆变器系统,异步电机在两相静止坐标系下的定子电压方程为
(1)

两相静止坐标系下的转子磁链方程为

(2)
以矢量xαβ=xα+jxβ的形式表示静止坐标系的电机状态方程,即ψsαβ=ψsα+jψsβ为定子磁链矢量,usαβ=usα+jusβ为定子电压矢量,isαβ=isα+jisβ为定子电流矢量,ψrαβ=ψrα+jψrβ为转子磁链矢量。则式(1)和式(2)可以重写为
(3)

(4)
将式(4)代入式(3),得到以定子电流矢量isαβ和转子磁链矢量ψrαβ为变量的电压矢量方程:

(5)
在转子磁场定向的矢量控制系统中,电机稳态运行时,转子磁链恒定,同时机械时间常数远大于控制周期,可以认为式(5)最后一项近似为恒定的反电动势,即:

(6)
将恒定的反电动势Eαβ看作一个扰动,将式(5)以电压为输入以电流为输出,得到异步电机在静止坐标系下的传递函数:

(7)
对于数字控制的逆变器系统而言,在每2个控制器作用时刻中间(控制周期),电压指令信号抑制保持不变,这相当于在系统环路中引入了一个零阶保持器。
暂不考虑谐波和延时的影响,数字控制的逆变器系统可以等效为一个零阶保持器,其传递函数为
(8)
式中:Ts为控制周期。
则三相逆变器供电的异步电机系统静止坐标系下的离散模型(脉冲传递函数)为

(9)
将式(9)展开成差分方程,得:
isαβ(k+1)=isαβ(k)e-RsTs/(δLs)+
(10)
式中:isαβ(k+1)、isαβ(k)为静止坐标系下(k+1)、k时刻的定子电流矢量;usαβ(k)为静止坐标系下k时刻的定子电压矢量。
将式(10)转换到旋转坐标系,可得:
idq(k+1)=idq(k)e-RsTs/(δLs)e-jωsTs+

(11)
式中:idq(k+1)、idq(k)为旋转坐标系下(k+1)、k时刻的定子电流矢量;udq(k)为旋转坐标系下k时刻的定子电压矢量。
将式(11)转换为脉冲传递函数即得到异步电机在旋转坐标系下的离散模型:
(12)
由于整个DSP数字控制系统存在一拍滞后环节,在旋转坐标系下传递函数为e-jωsTsz-1。因此,考虑数字延时的异步电机在旋转坐标系下的离散模型为

(13)
2 最少拍电流控制器
根据异步电机离散数学模型(脉冲传递函数),采用最少拍系统设计方法确定数字控制器。为了保证闭环采样系统的稳定,闭环传递函数Φ(z)和误差传递函数Φe(z)均不包含z平面单位圆上或单位圆外的极点。此外广义脉冲传递函数G1(z)中所含的单位圆上或单位圆外的零点、极点也不希望用校正器D(z)来补偿,以免参数漂移对这种补偿带来不利的影响。因而G1(z)中所含的单位圆上或单位圆外的零点、极点只能用Φ(z)和Φe(z)的零点来抵消[9]。
综上,由式(13)可知,Gr(z)存在延迟因子z-1。根据最少拍系统设计方法,Gr(z)中的z-1因子应包含在闭环传递函数Φ(z)零点中,故选择:
Φ(z)=az-1
(14)
其中,系数a待定。
在单位阶跃输入条件下,选择系统误差函数为
Φe(z)=1-z-1
(15)
由Φ(z)=1-Φe(z)可得a=1,因此控制器的脉冲传递函数为

(16)

(17)
式中:ejωsTs为延时环节;Kp为比例系数;Ki为积分系数。
根据式(16),可得基于复矢量分析方法的最少拍电流控制器的传递函数框图,如图1所示。

图1 最少拍电流控制器的传递函数框图
3 Simulink仿真与装车试验结果
3.1 Simulink仿真试验
为了验证基于复矢量的最少拍电流控制器在仿真环境下的性能,在Simulink环境下,搭建基于异步电机的控制系统(采用无速度传感器的间接磁场定向矢量控制方法),进行仿真试验,开关频率为500 Hz,惯量设置3 000 kg·m2, 仿真时间设置100 s。异步电机的参数如下:功率P=400 kW;额定线电压UL=1 146 V;额定电流Is=233 A;额定转速n=1 800 r/min;定子电阻Rs=0.077 25 Ω;转子电阻Rr=0.047 4 Ω;定子电感Ls=0.029 877 H;转子电感Lr=0.030 17 H;极对数p=2。仿真用电机参数与装车试验所用的电机参数一致。
图2为动车牵引异步电机起动及加减载过程中的转矩/励磁电流指令/反馈值的仿真波形。从图2可以看出,异步电机起动及加减载过程中,转矩/励磁电流变化平稳,转矩/励磁电流反馈值均跟随转矩/励磁电流指令值。
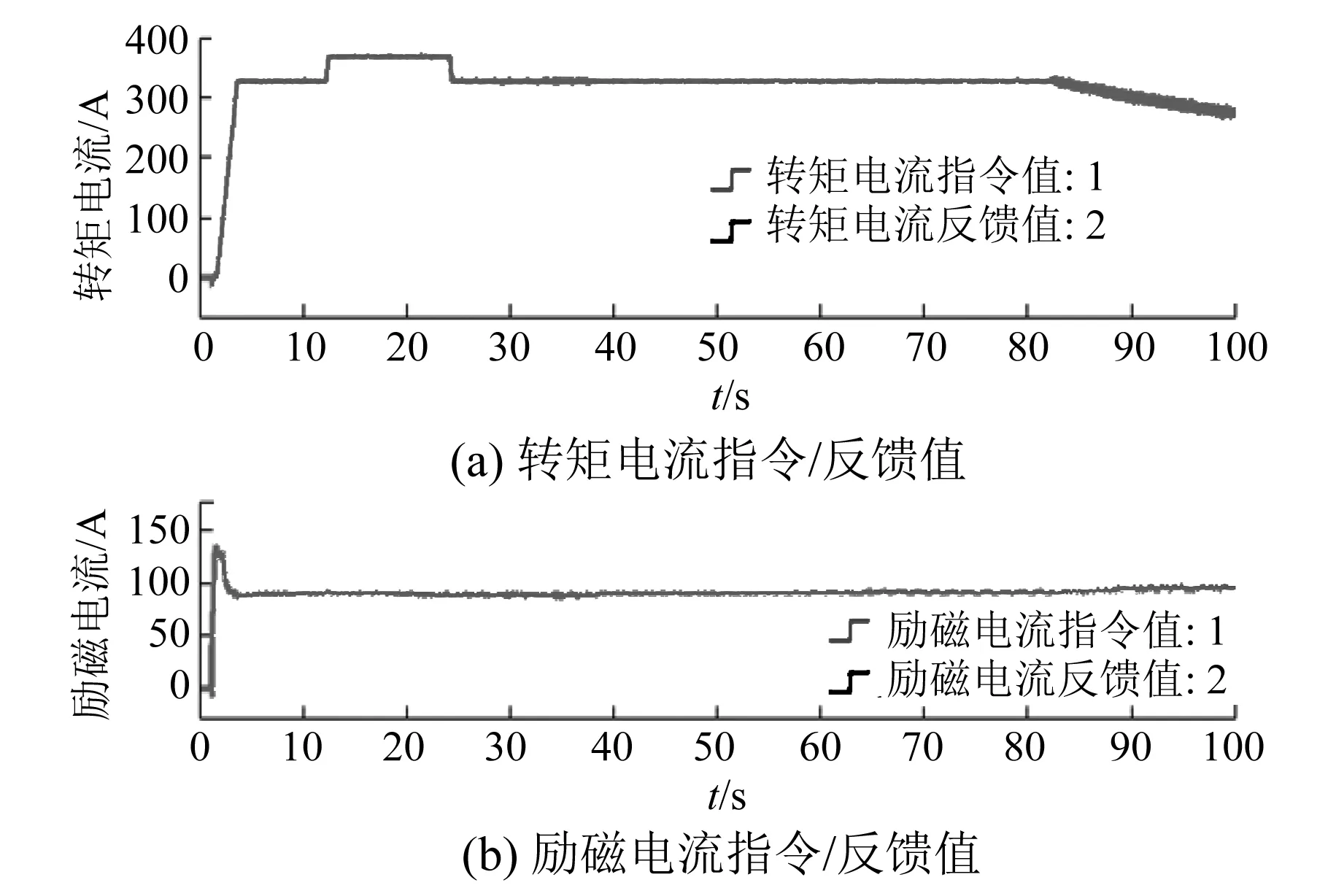
图2 转矩/励磁电流仿真波形
图3、图4分别为动车牵引异步电机起动及加减载过程中的U相电流、UV线电压仿真波形。可以看出,异步电机起动及加减载过程中,电流、线电压变化平稳,无振荡。
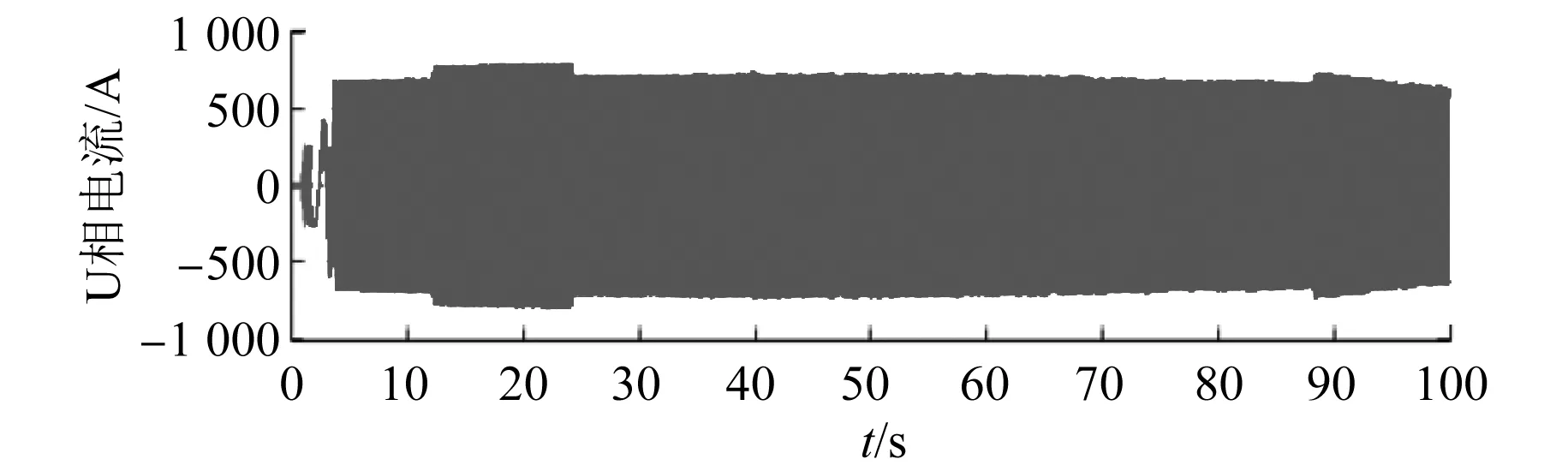
图3 U相电流仿真波形

图4 UV线电压仿真波形
3.2 装车试验
为了验证基于复矢量的最少拍电流控制器在动车牵引异步电机中的性能,在海口动车线进行装车试验。
图5为动车牵引过程中的实测波形,从上到下依次为输出电流、转子频率、转矩指令。从图5可以看出,异步电机牵引过程中,输出电流和转子频率变化平稳,说明这种基于复矢量的最少拍电流控制器在动车牵引异步电机牵引过程中具有较好的性能。

图5 牵引过程中的实测波形
图6为动车制动过程中的实测波形,从上到下依次为输出电流、转子频率、转矩指令。从图6可以看出,异步电机制动过程中,输出电流和转子频率变化平稳,说明这种基于复矢量的最少拍电流控制器在动车牵引异步电机制动过程中具有较好的性能。

图6 制动过程中的实测波形
4 结 语
本文针对动车牵引逆变器的开关频率较低,使得常规电流PI控制器的性能较差问题,根据复矢量法分析方法,建立了包含延时影响的最少拍电流控制器。通过Simulink仿真及在海口动车线装车进行试验,试验结果表明基于复矢量的最少拍电流控制器在动车牵引异步电机运行过程中具有较好动态及稳态性能,转矩/励磁反馈电流均能较好地跟随转矩/励磁指令电流。并且在牵引、制动过程中,电流和转子频率稳定变化,无明显振荡。
