双三相永磁同步电机位置伺服前馈反馈复合控制*
2021-03-12谭华军赵文祥
谭华军,和 阳,赵文祥,王 恒
(江苏大学 电气信息工程学院,江苏 镇江 212013)
0 引 言
双三相永磁同步电机(PMSM)具有功率密度大、转矩脉动小、可靠性高等优点,可广泛应用于船舶舰艇、航空航天、电动汽车等场合[1-2]。基于双三相电机构建的位置伺服系统,可实现大转矩和高控制精度,尤其适合应用于无人作战车、自行火炮等国防装备中。利用空间矢量解耦的双三相PMSM矢量控制,基本控制结构与传统三相电机相类似,不同点在于双三相电机存在谐波电流空间z1-z2和零序电流空间o1-o2[3-4]。
为了使位置伺服系统具有更高的动态响应、稳态精度以及能无差跟踪,国内外学者已提出了许多先进的控制算法。自抗扰控制器采用观测加补偿的方法来处理控制系统中的非线性和不确定性问题,从而实现系统的高性能控制[5-6]。文献[7]为了提高系统抗负载扰动能力,通过引入扩张观测器设计出了基于自抗扰的位置和电流双环控制结构,提高了系统的刚度。文献[8]则提出了一种基于线性自抗扰控制器的负载转矩前馈补偿控制方法,以消除负载转矩变化的影响。为了获得更高的测量值精度,文献[9-11]提出自适应卡尔曼观测器,来弥补编码器的测量噪声,用可变增益矩阵来估计和校正观察到的位置、速度和负载转矩解决伺服系统在低速运行时容易出现较大的速度误差和时间延迟的问题。伺服系统中惯量变化会影响伺服控制器的性能,通过辨识惯量来矫正控制器参数具有重要意义。文献[12-16]通过设计最小二乘法、滑模观测器、卡尔曼观测器等方法在线辨识转动惯量,然后使用惯量观测值调整控制参数,使伺服系统控制性能大大提高。文献[17-18]在采用永磁同步直线电机的精密机床推进系统中,设计了一种摩擦前馈控制器,抵消突变的非线性摩擦力,提高了伺服系统的跟踪精度。与其他控制算法相比,添加前馈的复合控制器结构简单、易于实现,能够避免调节参数过多、控制结构复杂等问题。同时,在数字系统中复合控制器的离散化也较容易,便于工程应用。
本文首先对2套绕组相差30°的双三相PMSM进行数学建模,搭建了双三相电机位置伺服控制框图。其次,分别对伺服系统的三闭环结构进行分析,在电流环添加反电动势补偿以减小反电动势对电流响应的影响;在速度环控制器的积分器中添加限幅环节,使积分补偿量快速退饱和,实现速度的快速响应;对位置环设计前馈反馈复合控制器,以实现伺服系统的快速响应和无差跟踪给定。最后,通过试验验证了算法的可行性和有效性。
1 电机特性与数学模型
1.1 电机拓扑
图1为双三相PMSM结构图。该电机由2套互差30°电角度的定子绕组组成,其中2套绕组中性点隔离。图2为双三相逆变器结构框图,分为N1和N22个中性点。
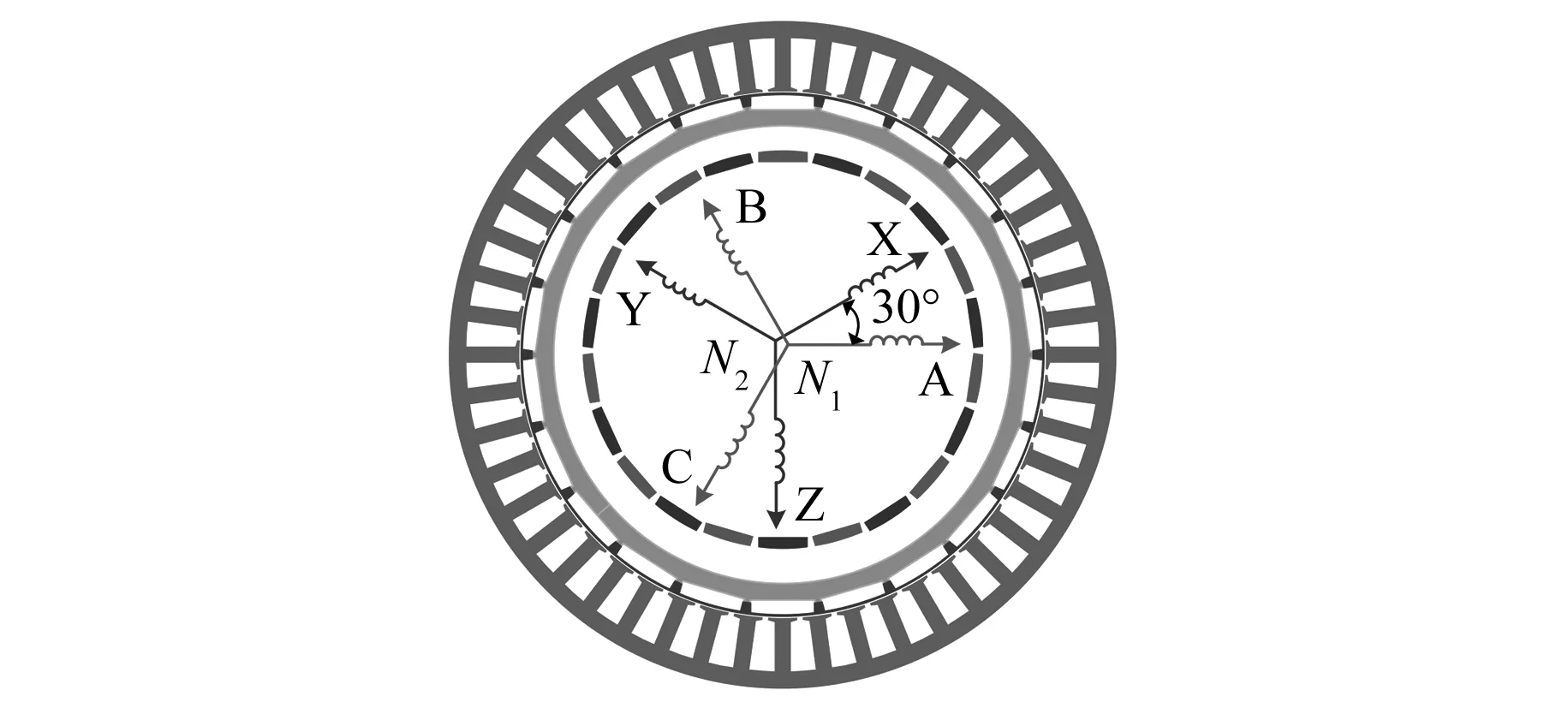
图1 双三相电机结构图

图2 双三相逆变器结构框图
双三相电机得益于2套绕组间转矩相位的补偿效应,有效降低了6次、18次、30次等转矩谐波含量,转矩脉动得到明显抑制。另外,双三相电机还具有更高的绕组系数,电机获得高转矩密度的潜能更大。因此,双套绕组的结构使该电机具有容错性强、功率密度大,转矩脉动小等优点,适合应用在大转矩高精度的伺服领域。
1.2 数学模型
利用空间矢量解耦,不考虑零序空间,双三相PMSM在同步旋转坐标系dqz1z2下,磁链方程可定义为

(1)
式中:Ld、Lq、id、iq别为dq轴电感和电流;ψf为永磁磁链幅值;La1、La2、iz1、iz2分别为谐波电感和电流。
在同步旋转坐标系dqz1z2下,电流方程可以表示为
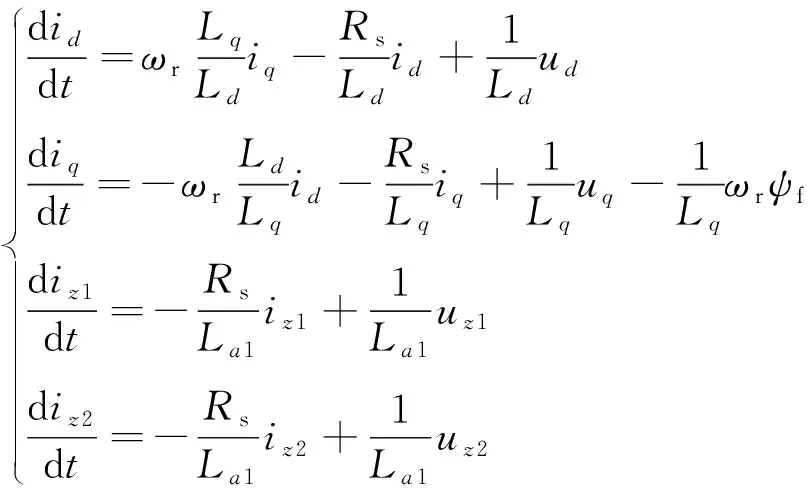
(2)
式中:ωr为转子角速度;Rs为定子电阻。
双三相电机的六维电流矢量通过坐标变换可以变换到3个不同空间,其中d-q子空间是基波子空间,电流为id、iq,机电能量转换发生在这一子空间;z1-z2子空间与电流谐波的产生和电机损耗有关,谐波电流为iz1、iz2。
电磁转矩方程为
Te=3p[ψfiq+idiq(Ld-Lq)]
(3)
电机的机械运动方程为
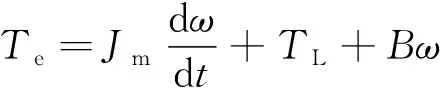
(4)
式中:p为极对数;Jm为伺服系统转动惯量;ω为转子机械角速度;TL为负载转矩;B为黏滞系数。
由式(2)可以看出,电流中存在谐波分量。另外,本文的双三相电机2套绕组采用中性点隔离的方式进行连接,不存在零序电流。
2 位置伺服复合控制设计
传统PMSM伺服控制框图如图3所示,主要由三闭环构成。内环为电流环采用PI控制器,主要作用是改造内环控制对象的传递函数,提高系统的快速性,及时抑制电流环内部的干扰;中间环为速度环采用PI控制器,主要作用是增强系统抗负载扰动的能力,抑制速度波动;外环为位置环采用P控制器,主要作用是保证系统静态精度和动态跟踪性能,使整个伺服系统能稳定、高精度运行。
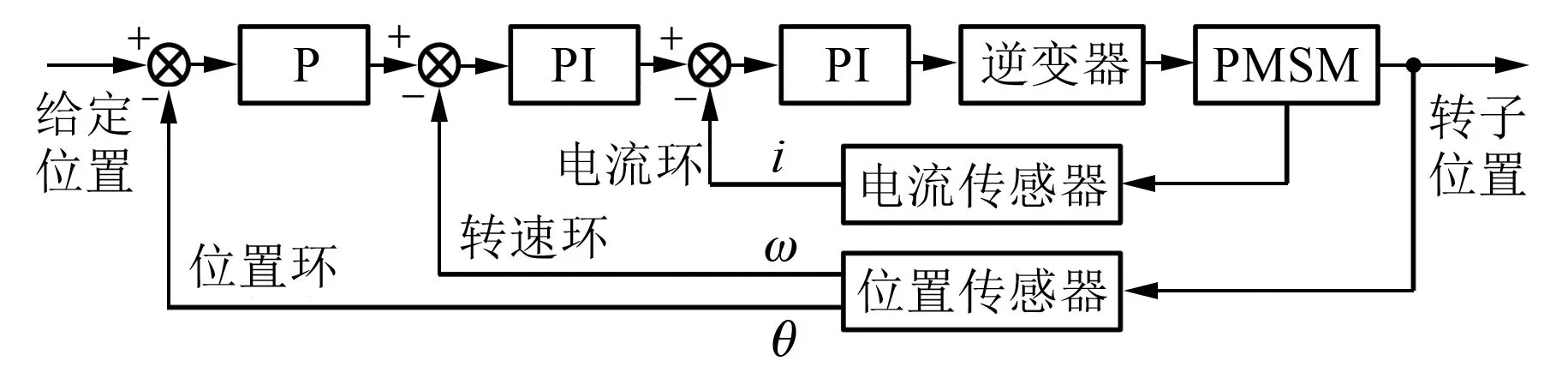
图3 传统PMSM伺服系统控制框图
由于双三相PMSM采用表贴式结构,使得dq轴电感相等。并且,构建的位置伺服系统采用id=0的控制策略。为了控制谐波电流为零,需要添加2个谐波电流控制闭环,最终得到双三相PMSM位置伺服控制框图如图4所示。其中,Ke为反电动势系数,θ为机械角度,θe为电角度,ω为转速。与传统伺服控制结构相比,本文构建的双三相电机位置伺服系统添加了位置前馈控制器F(s)和电流环反电动势前馈补偿。

图4 双三相电机位置伺服控制框图
2.1 电流环设计
将id=0和Ld=Lq代入式(2),可得q轴的电压方程:

(5)
对式(5)进行拉氏变换,电枢绕组传递函数为
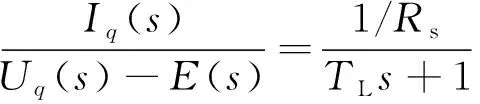
(6)
式中:E(s)为q轴反电动势;TL为电磁时间常数,TL=Lq/Rs。
电流环主要作用是增强系统刚度以及电流响应的快速性。使用PI控制器可以将电流环矫正为典型Ⅰ型系统,改善电流环的随动性能。图5为电流环结构图。
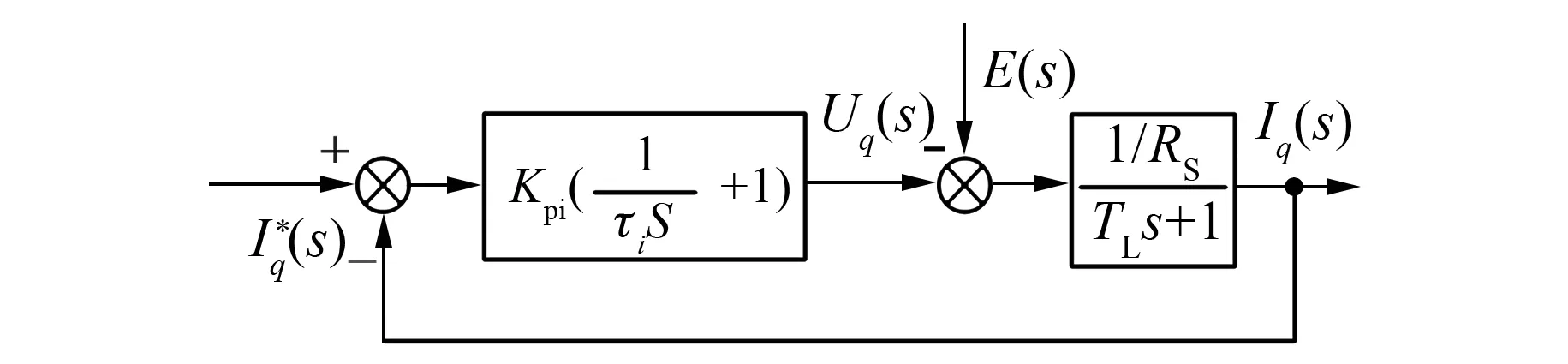
图5 电流环结构图
其中,Kpi为比例增增,τi为积分时间常数。为了抵消绕组的惯性环节,设计τi=TL。由图5可得电流输入作用下的闭环传递函数:

(7)
由式(7)可看出电流环能等效成时间常数为Ti=Lq/Kpi的惯性环节,Kpi越大系统响应越快,电流跟踪速度越快。
由图5可得反电动势输入作用下闭环传递函数为

(8)
由式(7)和式(8)可以得出电流总输出为
[E(s)-Ke·Ω*(s)]
(9)
从式(8)可以看出,反电动势作为输入,q轴电流的输出量与反电动势幅值变化率成正比。式(9)为电流环总输出电流,由给定电流和反电动势输入作用下的2部分电流输出组成。为了达到更好的电流响应效果,将反电动势系数和给定转速的乘积作为反电动势补偿量,减小反电动势对电流响应的影响。采用反电动势前馈补偿的电流环结构框图如图6所示。其中,Ke为反电动势系数,Ω*(s)为速度环的给定转速。
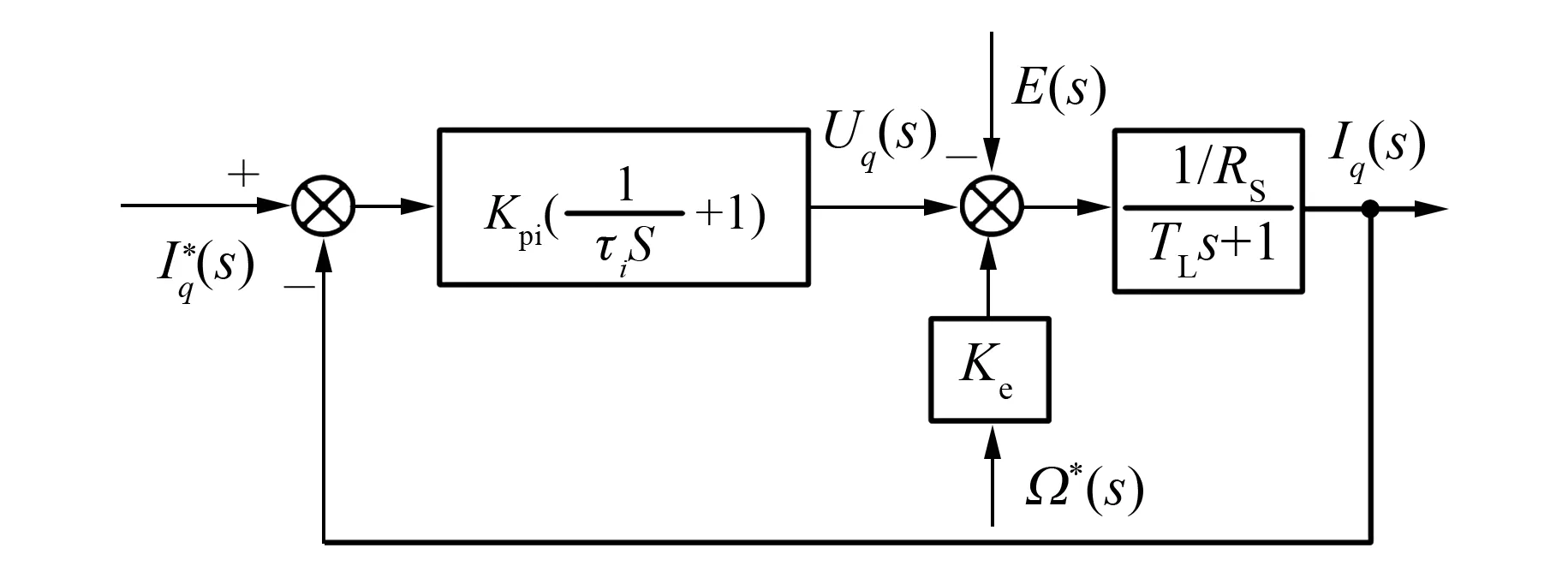
图6 添加反电动势补偿的电流环结构图
双三相PMSM的铜耗为

(10)
式中:io1、io2为零序电流。
中性点隔离的连接方式使io1和io2为零,不需要进行控制。为了减小铜耗,谐波电流iz1、iz2控制闭环的给定为零(见图4)。
2.2 速度环设计
速度环为电流环的外环,其输出值为电流给定值。由2.1节可知电流环可以看作小时间常数的一阶惯性环节,其闭环传递函数同式(7)。速度环主要需要提高抗扰性能来抑制转速波动,通常使用PI控制器矫正为典型Ⅱ型系统,通过设计典型Ⅱ型系统中频段的宽度来得到希望的系统性能。对式(4)的电机机械运动方程进行拉氏变换,可得运动系统传递函数:
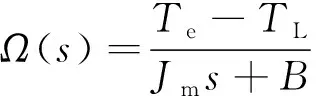
(11)
黏滞系数B在实际系统中一般较小可忽略,则式(11)的大惯性环节可以看作为积分环节,可得速度环的结构图如图7所示。其中,KT为力矩系数。

图7 速度环结构图
由图7可得速度环开环传递函数:

(12)
典型Ⅱ型系统动态抗扰性能指标与速度环控制器参数有关。考虑出现扰动后系统的动态降落幅值以及恢复时间,选择典型Ⅱ系统中合适的中频段宽度作为最优,再根据“振荡指标法”中幅频特性峰值最小准则,可确定速度环PI控制器的最佳参数。在工程设计中,为了简化中频宽和截止频率的选择,通过“最佳频比表”找到这2个参数之间的最佳配合,得到最小的闭环幅频特性峰值。
速度环的输出为电流内环的给定值。为了避免过流,需要限制速度环的最大输出值,使电流给定在允许范围内。在速度环PI控制器的积分器中引入限幅环节来达到抗积分饱和的效果,使速度环输出能够快速退饱和,减小超调量加快系统响应。图8为添加积分限幅的速度环PI控制器结构图。

图8 抗积分饱和速度环PI控制器
2.3 位置环设计
通过设计速度控制器的参数,可以使速度环的阶跃响应无超调。此时,可近似认为速度环等效为惯性环节,可得速度环的闭环传递函数:

(13)
式中:Ts为速度环时间常数。
给定速度阶跃信号,则速度环时域输出表达式为

(14)
通过测量实际系统的速度阶跃响应曲线,可以得到Ts的大小。
位置环为速度环的外环,其输出为速度环的给定值。位置环主要的追求目标是位置定位精度、位置跟踪精度和位置跟踪速度。传统伺服系统位置控制器如果只采用纯比例控制,很难满足高动态伺服系统快速跟踪的要求,增大比例增益可以提高系统位置响应速度。但是,过大的增益会使系统的稳定裕度降低,增益的提高被限制在一定范围内。图9为采用比例控制器的位置环结构图。

图9 位置环结构图
其中,Kθ为位置增益,误差Eerr(s)对输入信号θref(s)的传递函数为
(15)
由终值定理可得稳态误差为

(16)
当θref(s)=1/s,即输入为阶跃信号时,ε=0;当θref(s)=1/s2,即输入为斜坡信号时,ε=1/Kθ。如果位置环只采用纯比例控制,系统响应速度会受到限制,并且对某些给定输入信号不能实现零误差跟踪。按照给定输入的前馈反馈复合控制能提前计算出产生理想输出需要的控制信号,可以有效减小响应时间改善系统的跟踪性能。位置环采用前馈反馈复合控制结构图,如图10所示。
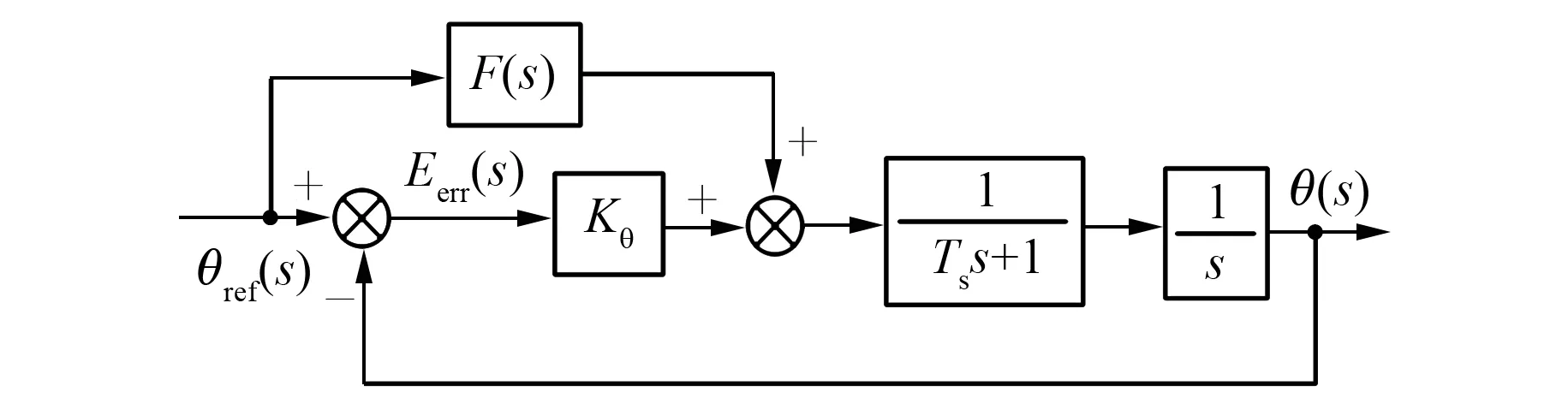
图10 前馈反馈复合控制结构图
误差Eerr(s)对输入信号θref(s)的传递函数为
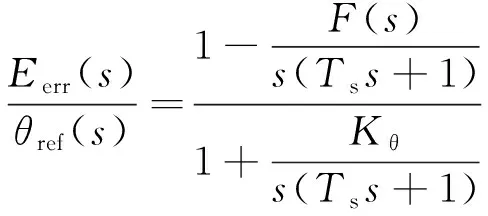
(17)
当系统输出能够完全复现输入指令,即系统可以零误差的跟踪输入,此时误差传递函数为零。因此,可得理想情况下前馈控制器传递函数为
F(s)=s(Tss+1)
(18)
实际系统不可能具有无限大的带宽以及逆变器容量的限制,不能完全响应式(18)的微分补偿量。因此,在式(18)的微分环节添加滤波器,以减缓补偿量的幅值,使系统能够有效的响应。设计实际前馈控制器传递函数:
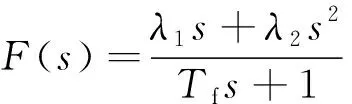
(19)
其中,Tf可以参考位置环的阶跃响应时间进行设计。
将式(19)代入式(17)可得误差传递函数:

(20)
由终值定理可得稳态误差为

(21)
当θref(s)=1/s2时,代入式(21)可得稳态误差为
(22)
从式(22)可以看出,当λ1=1时,ε=0,此时位置伺服系统可以无差跟踪斜坡输入。在实际系统中各个闭环存在滤波环节,以及在分析速度外环特性时,将速度环近似等效为惯性环节,因此实际的λ1值小于1。而且,式(22)中不包含λ2,可以消除前馈控制器F(s)的s2项。
3 仿真验证
基于以上所述控制方法,根据图4的控制系统框图,搭建仿真模型进行仿真,验证该方法的可行性。在1台11对极双三相PMSM上进行试验验证,表1为电机参数。
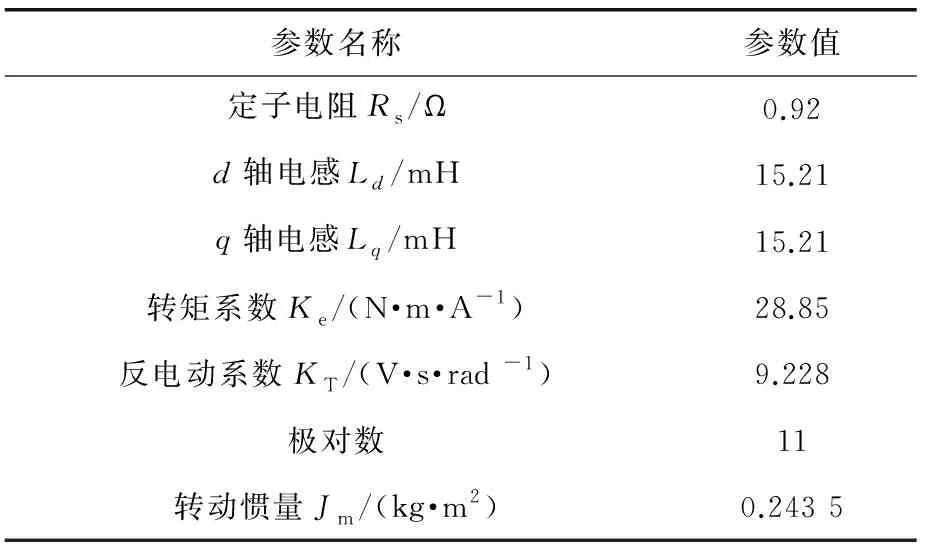
表1 电机参数
对图10进行扫频分析,可得系统的幅频响应和相频响应对比图如图11所示。从图11可以看出,增大位置增益可以提高系统的截止频率,使系统响应速度变快。但是,系统的稳定裕度会随增益的提高而变小。采用复合控制的伺服系统兼顾了系统的响应速度和稳定裕度,使系统的动态性能得到提高,同时增强了系统的稳定性。另外,采用比例控制器的位置控制系统中,在10-2kHz附近产生了谐振,导致响应曲线产生了尖峰。复合控制改变了系统谐振频率,其响应曲线在该点没有出现尖峰。
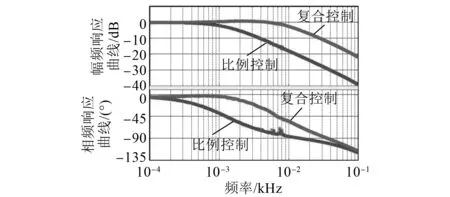
图11 频率响应
图12为纯比例位置控制器和复合控制阶跃响应的对比图。前馈控制器F(s)为输入指令的微分,对于阶跃响应其微分无穷大,实际伺服系统受逆变器容量和带宽等限制不能响应该补偿量。本文通过在F(s)中添加滤波器,以实现系统对阶跃的有效响应。从图12可以看出,复合控制的阶跃响应比比例控制器阶跃响应快。

图12 阶跃输入系统输出对比图
图13为纯比例位置控制器的系统响应,此时给定输入为斜坡信号。从图13可以看出,对于斜坡给定,系统响应依照速度的不同阶可以段划分为加速区和恒速区。在恒速区速度不变,可认为θref(s)=1/s2,由式(16)计算可知,存在一个固定的跟踪误差,其大小与位置增益成反比。
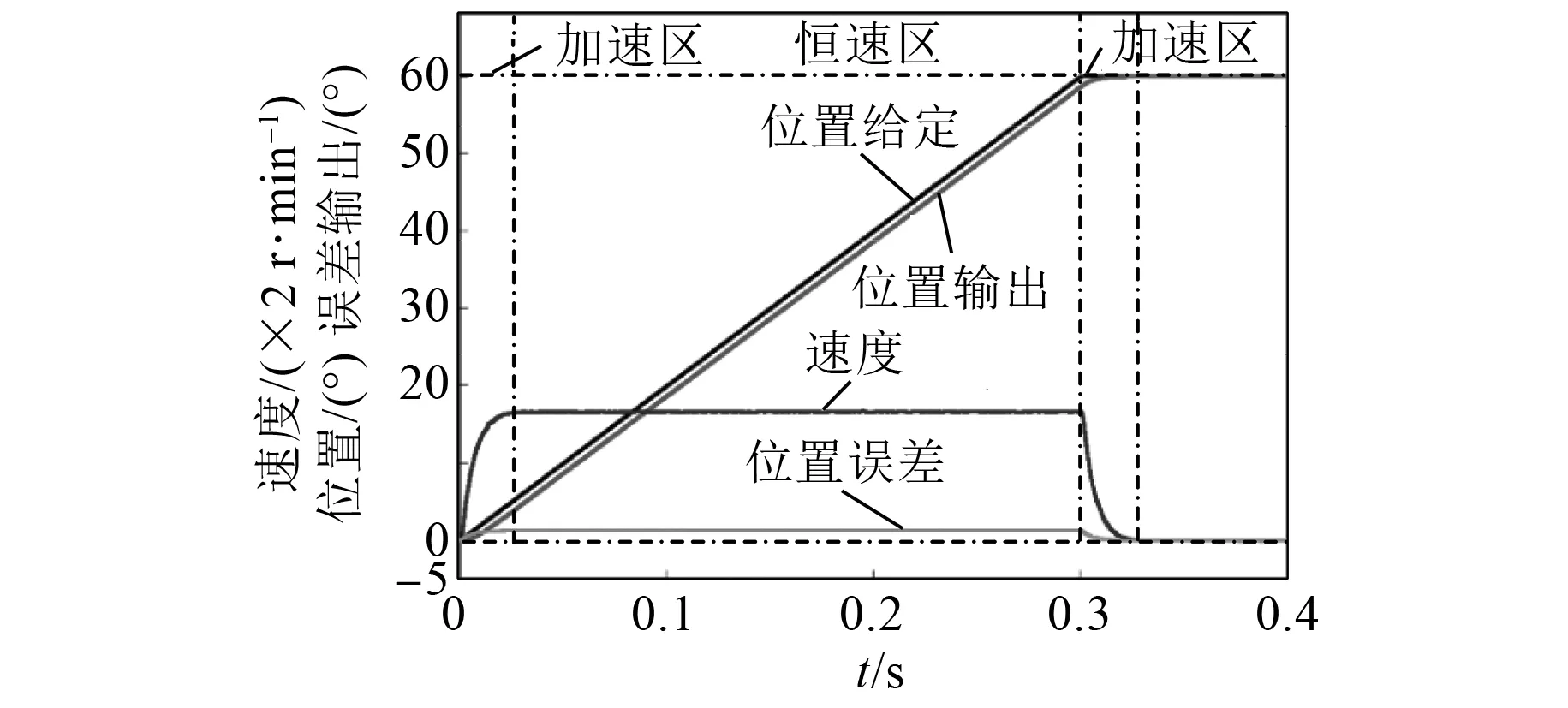
图13 纯比例位置控制器斜坡给定
图14为采用复合控制输入斜坡信号时系统的输出响应。在恒速区可认为θref(s)=1/s2,由式(22)可知,通过选取合理的λ1的值可以使跟踪误差为零,系统此时可以无误差跟踪斜坡输入。在加速区,由于前馈控制器的快速调节作用,跟踪误差被抑制在很小的范围内。对比图13可以看出,复合控制比采用比例位置控制器的系统,其超调量并没有增大。
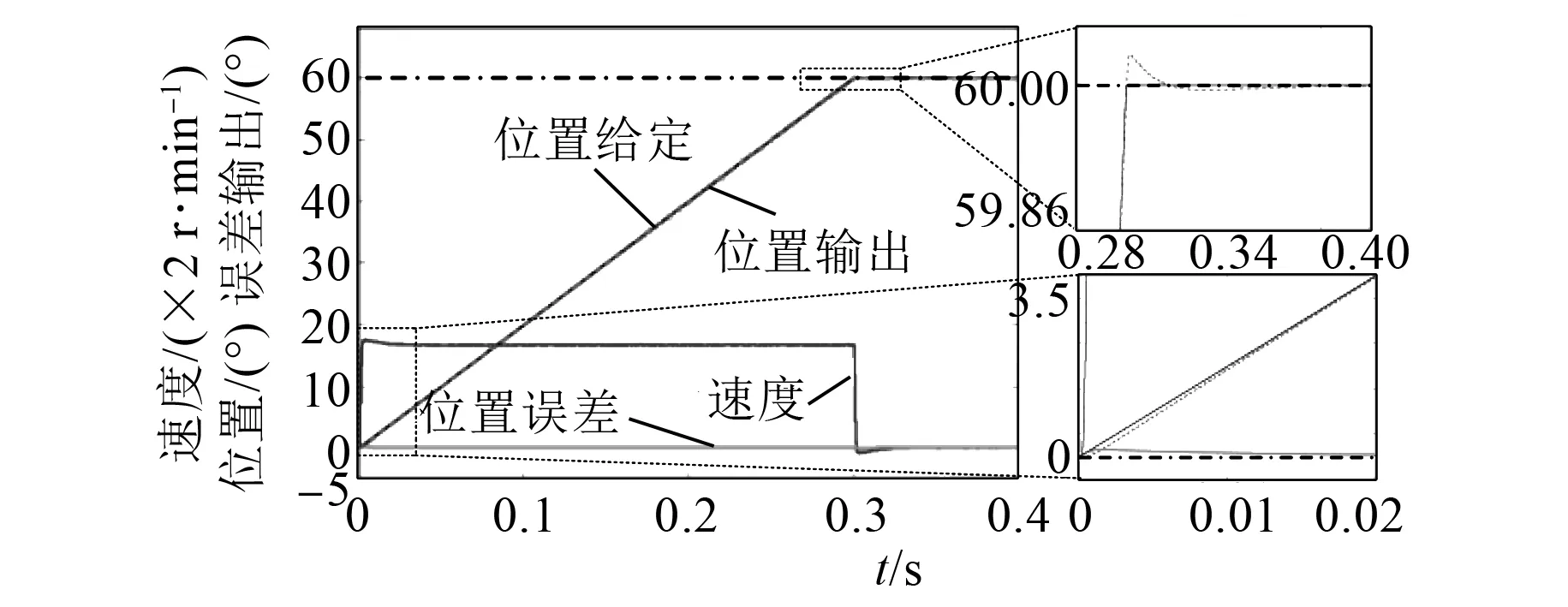
图14 复合控制斜坡给定
图15为输入三角波给定,复合控制和纯比例位置控制器系统输出对比图。可以看出,纯比例控制的系统响应时间长,并且在恒速区存在恒值稳态误差,系统输出不能完全跟随给定。在三角波的顶点处由于位置响应慢,伺服系统不能使位置快速跟随到顶点。添加前馈的复合控制可以提高系统的响应速度,而且能够消除恒速区的误差,使系统可以准确跟踪输入信号。

图15 三角波给定系统输出对比图
4 试验验证
为了验证理论分析和仿真结果的正确性,构建双三相PMSM伺服系统进行试验。控制器的主芯片为TMS320F28377S,逆变器开关管为碳化硅IGBT,开关频率为20 kHz,电流环控制周期、速度环控制周期和位置环控制周期均为50 ms。图16为试验平台。主要由双三相PMSM、转矩传感器、磁粉制动器、伺服驱动器等构成。采用旋转变压器对位置和速度信号进行采样。

图16 试验平台及设备
图17为伺服系统速度阶跃响应。从图17可以看出,系统的速度环可以近似等效为惯性环节,通过测量速度响应曲线,可以计算出速度环惯性时间常数Ts约为50 ms。从图17还可以看出,由旋变测量的11个电周期为一个机械周期,对电周期进行计数就可以计算出转子的机械角度,实现位置和速度闭环。

图17 速度阶跃响应
图18为采用纯比例位置控制器的伺服系统的输出波形,此时给定为60°阶跃信号。达到指定机械位置系统的响应时间大约为0.8 s,最大速度大约为50 r/min。当位置误差较大时,系统以大转速运行至给定位置,当位置误差逐渐减小到零,速度也由最大转速逐渐减小到零。
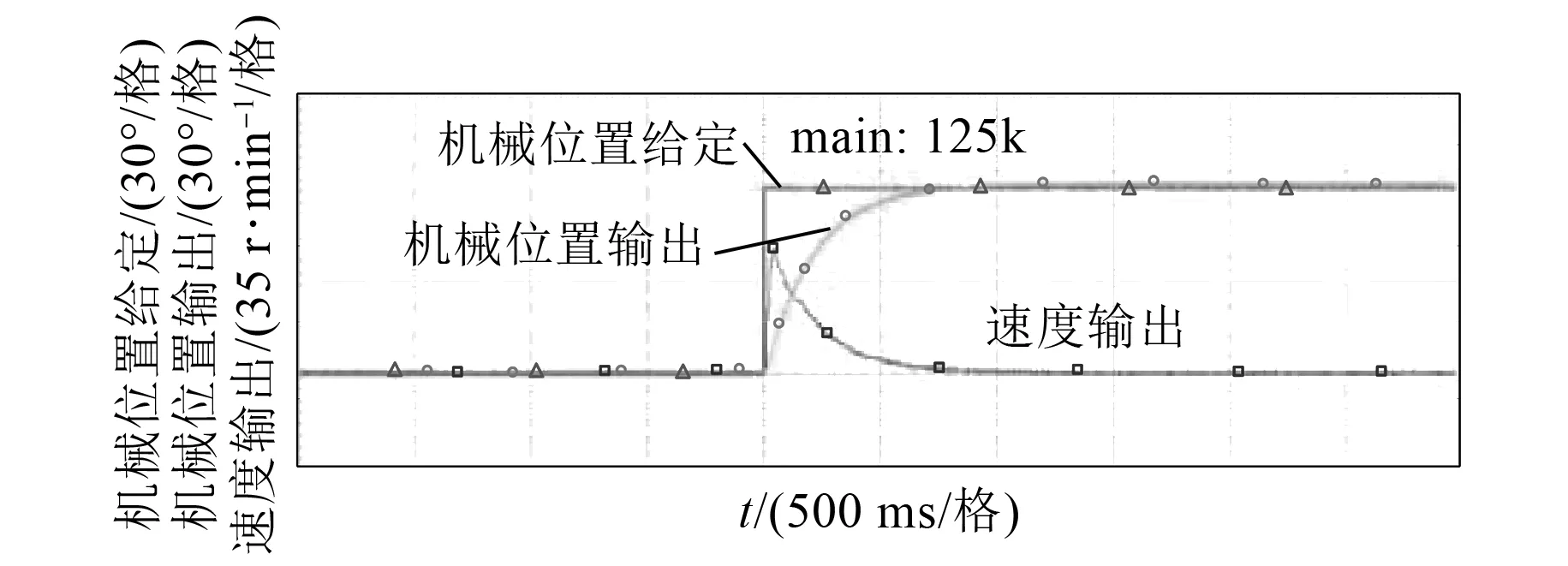
图18 纯比例位置控制器阶跃响应
图19 复合控制阶跃响应
图19为采用复合控制,给定60°阶跃信号系统的响应。参考图18的伺服系统位置阶跃响应时间,前馈控制器F(s)中的Tf设计为0.2 s,λ1设计为0.16。从图19可以看出,到达给定位置系统的响应时间大约为0.5 s,最大转速约为57 r/min。对比图18和图19可知,使用复合控制的位置伺服系统动态响应更快。
图20为采用纯比例位置控制器系统输出,给定的斜坡信号为θref(t)=60t,终值为60°。在起始阶段,系统的跟踪速度缓慢不能准确到达给定位置。在恒速阶段,从图20可以看出,存在一个大小为4.2°的跟踪误差,其大小与伺服系统位置增益有关,增益越大跟踪误差越小。但是,增益过大会降低系统的相位裕度,使系统的稳定性降低,故误差不能完全消除。
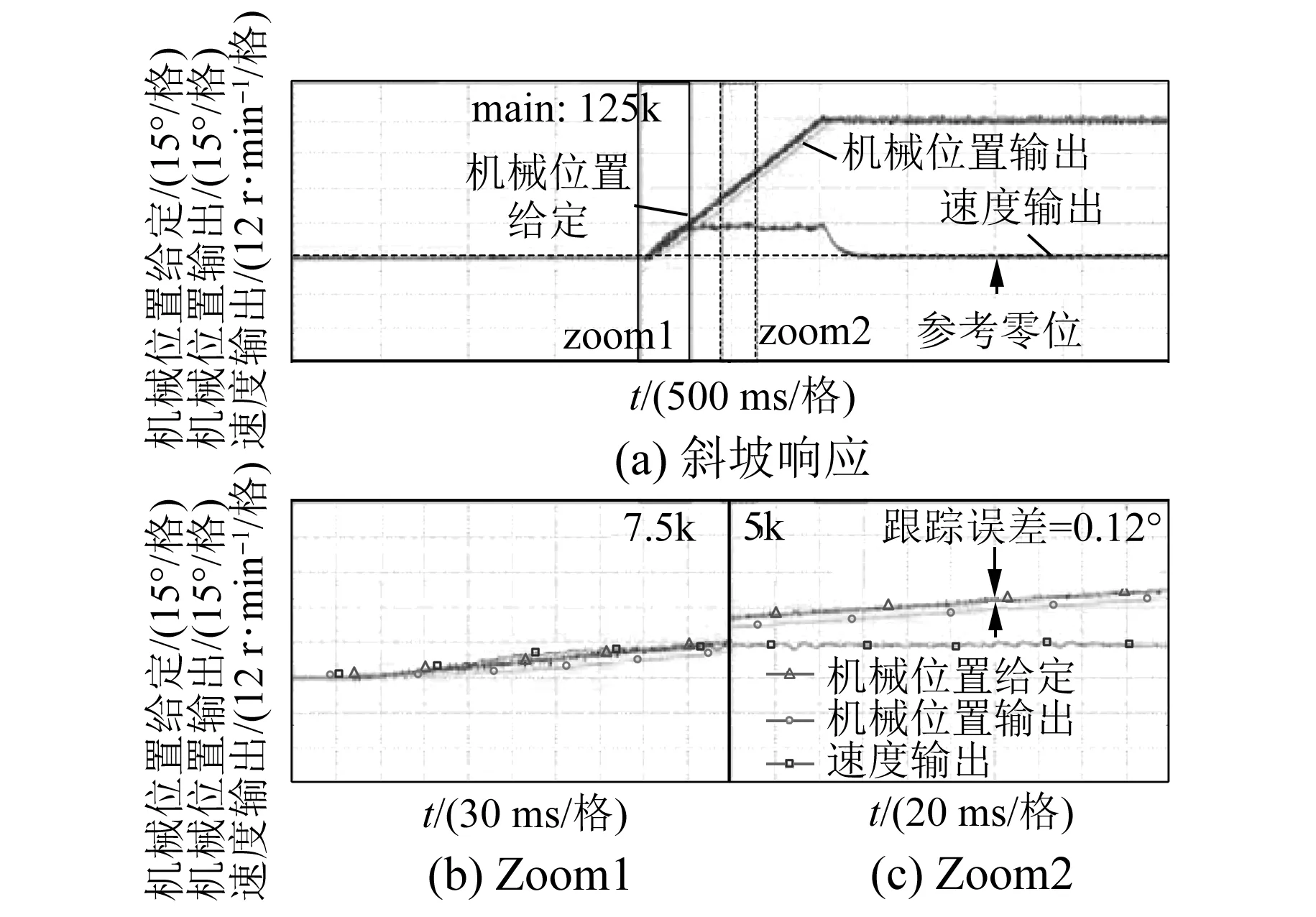
图20 纯比例位置控制器斜坡响应
图21为复合控制系统输出,给定的斜坡信号为θref(t)=60t,终值为60°。从图21可以看出,由于前馈作用,在起始阶段系统的响应速度得到提高,使系统输出能够快速跟随给定。在恒速区,跟随误差减小到0.12°,再适当的调节λ1,可以使跟踪误差减小到零,实现无误差跟踪。
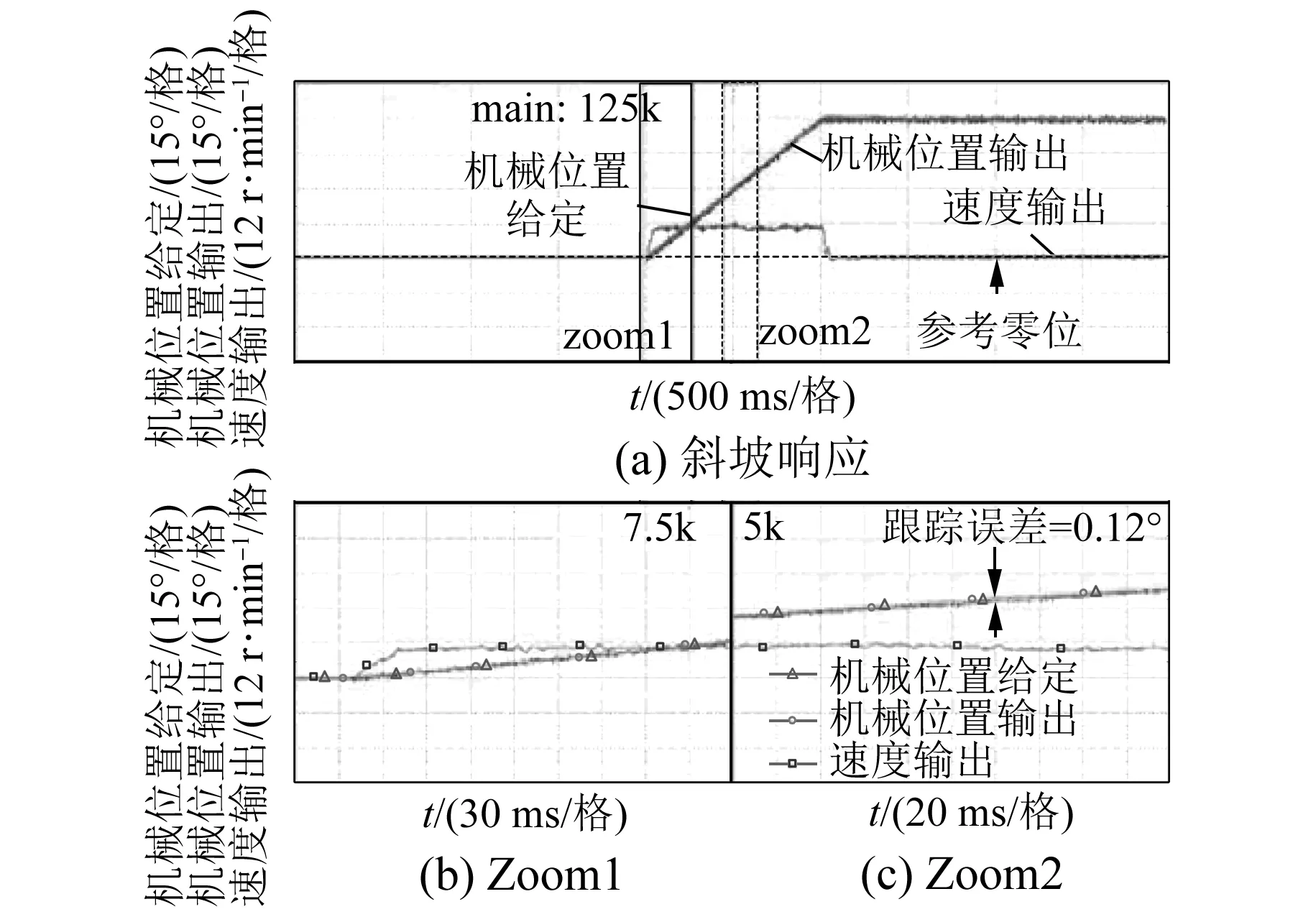
图21 复合控制斜坡响应
图22和图23为三角波位置给定,周期为2 s顶点为60°。从图22可以看出,采用纯比例位置控制器的伺服系统,在恒速区存在固定大小的跟踪误差,在顶点处由于系统的响应速度慢,系统输出不能达到顶点位置。图23为复合控制伺服系统输出,与图22相比,速度的响应更接近方波,即系统的动态性能更高。高动态响应使系统能够快速跟随给定信号,提高了跟踪精度。
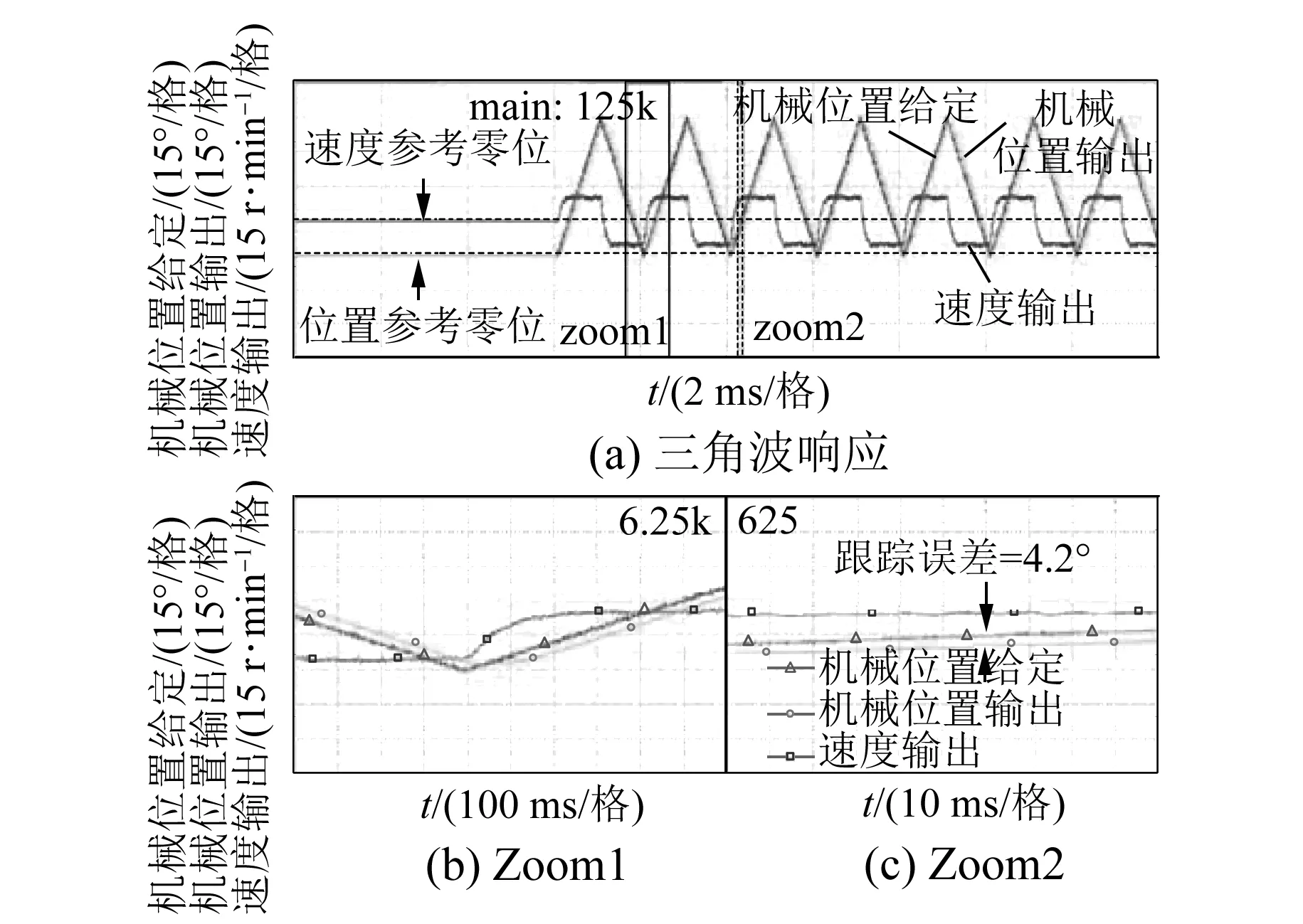
图22 纯比例位置控制器三角波响应
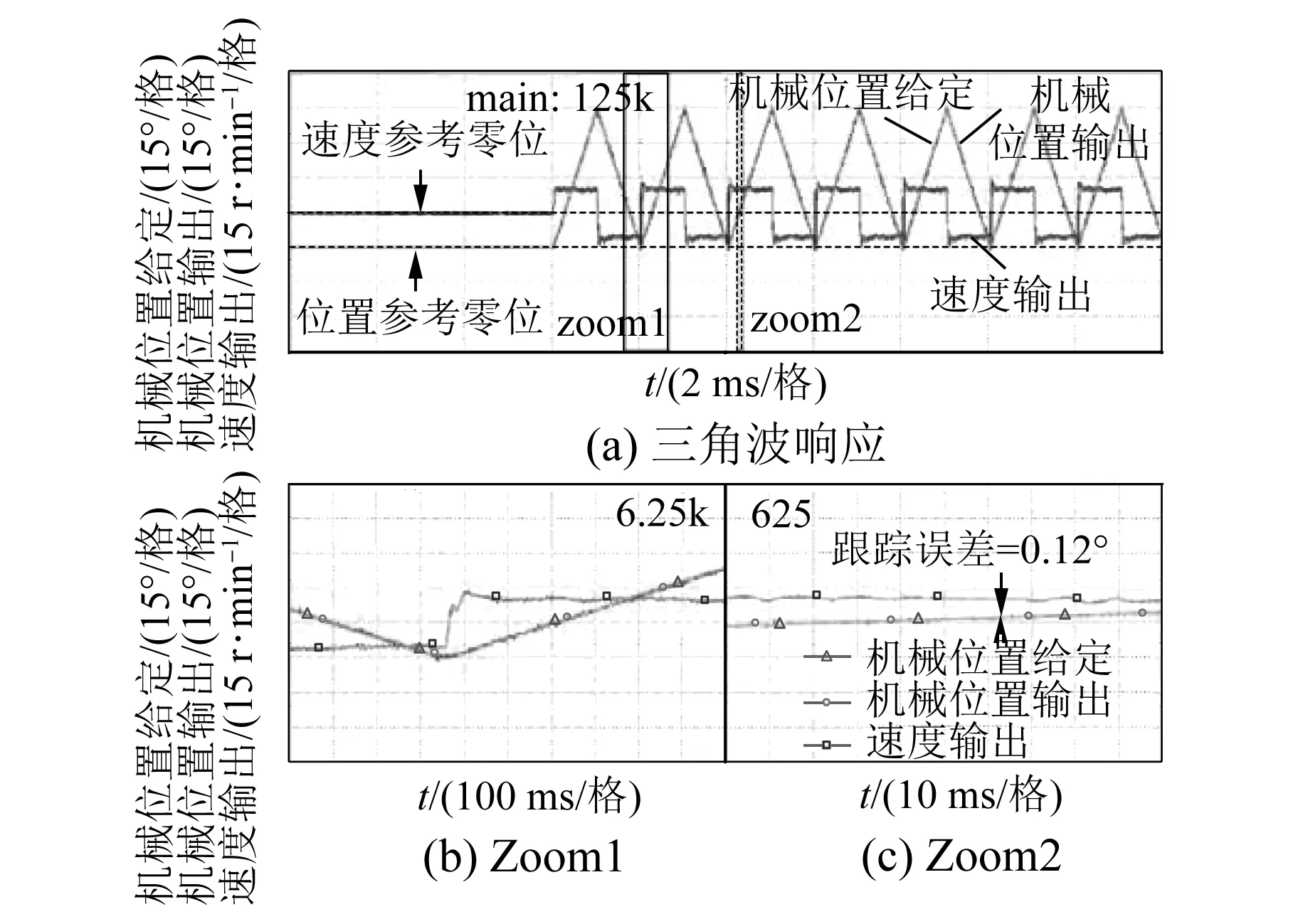
图23 复合控制三角波响应
5 结 语
本文提出了一种伺服系统前馈反馈复合控制方法。以传统位置伺服系统传递函数模型为基础,分析系统在不同输入信号作用下的稳态误差。通过设计复合控制器,重构传统位置伺服的误差传递函数,使系统能无差跟踪输入。同时,复合控制器还兼顾了系统响应的快速性和稳定裕度,提高了伺服系统跟随速度,并增强了系统的稳定性。试验结果表明,所提出的位置伺服复合控制方法能够有效地改善系统动态性能和跟踪精度,在阶跃和斜坡信号的作用下,均能准确地跟踪给定信号。
