多电机驱动振动机械同步理论的研究
2021-03-12张艺超
张艺超
(郑州铁路职业技术学院,河南 郑州 451460)
0 引言
所谓“同步”属于一种客观且特殊的运动形式,它广泛存在于自然环境与人类社会场域。从物理形态维度分析,同步现象可以视为两个及以上物体、系统保持稳定的相同或相似运动形式,如两个质点保持相同匀速、同向运动,或者两个物体呈现出相同的运动轨迹、相位等。基于同步现象的普遍性与自然科学技术的发展,人们在不同领域都发现了同步问题,诸如医学、生物学、化学、经济学等,“同步”这一概念也从自然科学领域拓展到哲学社会科学领域,关于同步理论的研究也进一步深入,从最早的“钟摆同步”延伸到“混沌同步”层次。聚焦振动机械领域,同步理论被广泛的引用在工业生产(系统)中,但要求相对简单,通常侧重于两个及以上的子系统(机械部件)能够保持同步运转——多电机驱动就是一个典型。其本质是要求多台电机保持相同速度、相位,诸如振动冷却机、振动桩机、振动筛、振动传输机等设备。为了实现振动机械整体运行的稳定统一,“同步状态”是一个重要的前提条件,在未引入同步理论之前,为了实现多电机驱动下的同步运转,所采用的手段主要是机械控制,如利用速度比1∶1的齿轮实现带有偏心的激振器同步运动,虽然可以一定程度上满足生产需要,但此类机械的设计、操作、管理等非常复杂,同步理论指导实践运用的价值,主要体现在精简振动机械结构、提高系统稳定性、降低维护成本等。从现状看,振动机械领域的同步问题研究已经相当全面,主要缺陷仍然集中在“自同步理论”方面,在多电机驱动工作状态下,仍存在一些尚未有效解决及解释的问题,比如两台电机工作时受到外界力量干预,在不停机的状态下如何从差异性转速、位移恢复到统一性转速、位移状态,又如多电机中一台停机后再次启动,如何与正在运转的电机仍然保持同步,本文以此为切入点展开探究[1]。
1 多电机驱动振动机械同步理论概述
根据多电机驱动振动机械“不同步”的现象区分,同步理论主要包括两个研究维度,分别是“同向回转自同步振动机械的同步理论”和“反向回转自同步振动机械的同步理论”。为了便于阐述振动机械同步理论内涵,本文以双电机驱动筛选系统为例,无论是同向回转或是反向回转,用于阐述理论的模型都可以简化为“弹簧—质量”系统,仅考虑平面坐标系(x,y)的振动方程及绕质心O的扭摆方程即可——假定振动质体(宏观质点)为M,则需要分别明确M的惯性力、阻尼力(运动中)、弹性力和激振力。
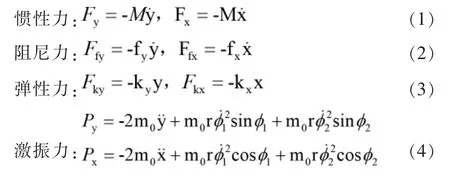
振动方程:

扭摆方程:

以上公式及方程中:M为振动机体质量;2m0为两偏心块质量和(m0为偏心块质量);J为振动机体对质心的转动惯量;2J0为两偏心快对机体质心的总转动惯量;J1和J2分别为轴系1、轴系2转换到轴1、轴2的转动惯量;l0为转轴1、转轴2到机体中心的距离;c1、c2为电动机1、电动机2换算到轴1、轴2的力矩系数;r为偏心距;ψ0为电动机换算到轴1、轴2的同步转速;f为阻力系数;k为弹簧刚度。为轴1偏心块角位移、角速度、角加速度;为轴2偏心块角位移、角速度、角加速度;为y的方向位移、速度、加速度;为x的方向位移、速度、加速度;为φ方向的位移、速度、加速度;Mf1、Mf2分别为轴1、轴2上的摩擦力矩。
本文选用的双电机驱动机体状态下,同向回转同步与反向回转同步的稳态解通过微分方程建立,综合以上(1)~(6)表达式,其中同向回转、反向回转同步振动系统微分方程(略去一阶微量)稳态解为:

以上为多电机驱动振动机械同步理论的数学解释方式,受篇幅限制,不再具体探讨求解及正向、反向自同步振动系统特性分析。
2 自同步振动机械动响应的实证分析
选用ZZS40-70型振动筛展开自同步振动机械动响应的实证分析,该设备内包括两台VB-326-WB电机驱动(带有偏心块),机体主要部分由弹簧、支架、筛体和各类连接器构成,如图1所示。

图1 ZZS40-70型振动筛(直线)
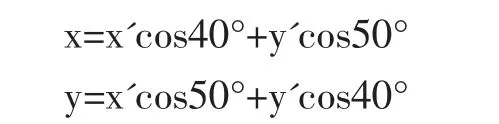
实证分析过程需要运用B&K振动测试分析系统,分别在振动筛机体的相邻位置分布加速传感器,水平、垂直方向各一个,用来测试主振动方向y、水平方向x'、两电机驱动轴心连线x、垂直方向y'的加速度信号;矢量合成信号表达为如下:
在此基础上对采样频率进行调整,依次调节电源输出电压50V、75V、100V,测量加速度信号的变化。
根据测试结果分析,ZZS40-70型振动筛机体的驱动电机为机体质心位于两轴心联线中心时,同步现象较为明显,而在两电机处于反向稳态回转时,y方向的直线运动保持良好,而在x方向没有发生同步振动,仍然需要进一步分析并调整;进入这一阶段后,将数据导入模拟试验台,通过调节偏心块的夹角大小,促使激振力大小、幅度符合同步振动需要。研究结果认为,双电机驱动的振动设备的机械系统要求很高,即便设备机体中所使用的电机是同一型号、同一规格,也可能存在转速、摩擦阻力距等不同的现象,因此,除了考虑电机产品性能之外,还要为两台电机提供高度一致的工作环境,如水平高度的一致性、支架的稳定性等[2-4]。
3 多电机驱动振动机械同步智能控制
由双电机驱动推导多电机驱动振动机械同步稳态,不难得出这样的结论,后者设备机体中独立旋转的振动电机要保持同步更加困难,且在大多数情况下,是无法通过协调电机物理环境及设备状态达到自同步条件的。而传统的控制理论中,主要运用PID控制方法来实现自同步,具体到控制系统设计上,一般在电机1上安装控制器、变频调速器,再连接电机2至N,N>1的电机设备都要安装传感器,将综合信号传输到控制器前端,而整个机械系统的末端为筛体。传统控制思想并不复杂,但要在硬件上实现的难度很大,突出表现是完整设备机体的体积大、占地多、安装不便,且无法做到快速、便捷的维修调试。随着工业信息化水平的不断进步,多电机驱动振动机械同步智能控制被提出来。
在该控制机制中,硬件模块的设计主要基于单片机的转速测量系统、电机转速测量系统、同步控制器电路等实现,其中最为关键的就是单片机的转速测量系统,它解决了传统控制同步系统中仪表多、组合复杂的困境。同时,单片机在现代工业控制系统中应用非常广泛,便于展开振动机械同步智能控制的非标化生产,其功能也拓展到了适应控制、数据采集、嵌入处理等方面;从硬件架构上分析,单片机转速测量系统主要包括系统扩展和系统配置两个模块,在系统扩展模块中加入转速信号拾取装置、整型装置、倍频装置等,即可实现信号的有效处理,而系统配置模块主要包括I/O口及通用外设。
而软件模块的设计相对复杂,从成本考虑,基于PID控制器的设计在市场上更为流行,且自身又具有简单控制结构优势,特别是应用在双电机驱动振动机械机体时,其算法简单、可靠性高的优势非常明显。在软件设计原则上,遵循模糊控制算法策略,而所谓“智能控制”,也主要体现为人类自然语言与机器语言的“模糊表达”,帮助机器学习常规规则及操作经验。其中核心设计为“模糊规则”,用于指导模糊推理的实现,整个模糊控制系统中最关键的模块为“模糊化”和“解模糊”的正逆处理机制。例如,基于“模糊化—模糊推理(模糊原则)—解模糊”完整流程中,首先由振动机械机体提供一个变量,在处理变量时可乘以一个达到稳态解(7)的比例因子,从而实现输入量化。相对应的,解模糊的过程中,也需要输入一个比例因子量化,所得到的输出变量实际上作为调整多电机驱动不同步状态的参数。由此不难看出,振动机械运转的时间越长,所积累的比例因子量化值就越多,对同步稳态的控制有效性就越高,这就是当前许多振动器在开机时噪音较大,而随着运转时间增加逐渐进入平稳状态的原因[5]。
4 结束语
综上所述,多电机驱动振动机械同步理论对于现代工业的发展具有重要影响,本文通过探索自同步振动筛实例表现,并结合仿真手段提出同步控制机制,具有一定的现实意义。其中,关于智能同步控制的关键在于硬件、软件设计的匹配性,现阶段来看工业设备中硬件发展速度要大于软件更新速度,所谓的智能控制对于模糊控制理论的依赖度较高,而这一结论在双电机驱动的振动机械质体中效果较好,但无法确保随着电机数量增加同样实现有效的同步稳态,所以仍然需要加强人工智能技术在该领域的探索。