分布式农田用光伏支架系统研究*
2021-03-12路文辉刘志馨周静伟张馨丹
路文辉,刘志馨,顾 浩,周静伟,张馨丹
(长春工程学院,吉林 长春 130000)
0 引言
能源经济是赖以持续存在的可发展的和发展活动起来的重要支柱,伴随着我国经济社会规模化的不断扩大,社会对太阳能源需求也在不断扩大,太阳能源更是成为人们日常社会生活中的一种重要支柱。这种新兴可再生利用能源技术是目前国际大多数发达国家对再生能源的主要发展策略选择。2017年10月,国土资源部和国务院扶贫办、国家能源局共同联合印发了《关于支持光伏扶贫和规范光伏发电产业用地的意见》,提出了光伏扶贫电站中可继续利用的农村未开发使用地,不得直接占据农村耕地;可以继续使用劣地,不允许占用好的土地。禁止利用任何形式占领基本农田,严禁在有关国家法律规定明确禁止的地区开发光伏电力。分布光伏电机具体是指在用户的附近安装分布光伏电机,再通过某种方式把太阳能转换成用户可以直接使用的电力。根据中国2013年12月30日公布的第二次全国土地调查结果,中国共有13 538.5万hm2的耕地,与203 077万亩相比,现在可以稳定地利用我国的土地面积相差超过1.2亿hm2;近几年,农业统计农作物的播种面积为24亿~25亿亩,考虑复种和间套作的情况,耕地应为19亿亩左右,耕地总面积庞大,分布农田光伏系统的发展前景广阔[1]。提高光电转换效率,提高逆变器转换效率,增加太阳辐射利用度,保持最大的光伏电板功率跟踪。光伏系统的效率提高目前主要通过4种方式。根据目前的技术条件,要进一步提高光伏电池转换效率,就需要降低光伏电池的转换成本;逆变器转换的效率超过95%,很难大幅提高;大多数光伏反变器产品都将增加太阳辐射利用率作为一个基本的功能。本文将研发一种适用于农田的光伏支架系统,在不影响农业生产的情况下,提高光伏照射量,提高光伏发电效率的支架,并确定其适用范围[2]。
1 适用农田的光伏支架设计
1.1 常见农业机械数据分析
我国农业机械化发展较晚,大型农业机械已发展至470万台,农业机械化程度达到70%。因此,适应农耕机械化的设计是光伏支架的首要考虑因素。目前,常见的农用机械分以下几大种类:
1)耕地整理机械。①拖拉机:运输、动力机械。②旋耕机:主要作用是平整土地,将大块的土疙瘩破碎成细土。③起垄机:在种地的时候将土地起垄,便于覆膜种植。
2)种子类。①拌种机:为了将种子与保护性的种子农药混合,防止播种时被病虫害侵害。②播种机:主要作用是将种子播撒到地里。
3)采收类。①各类粮食作物收割机(小麦收割机、水稻收割机、玉米收割机)。②脱粒机:在联合收割机没有出现之前常见的,主要的作用是将作物的籽粒提取。③烘干机:烘干籽粒。
4)植保类。①喷雾器:喷洒农药及叶面肥,这些年又多了电动的、汽油的、柴油的等等。②农用航空喷雾器。常用农业机械参数详情见表1。
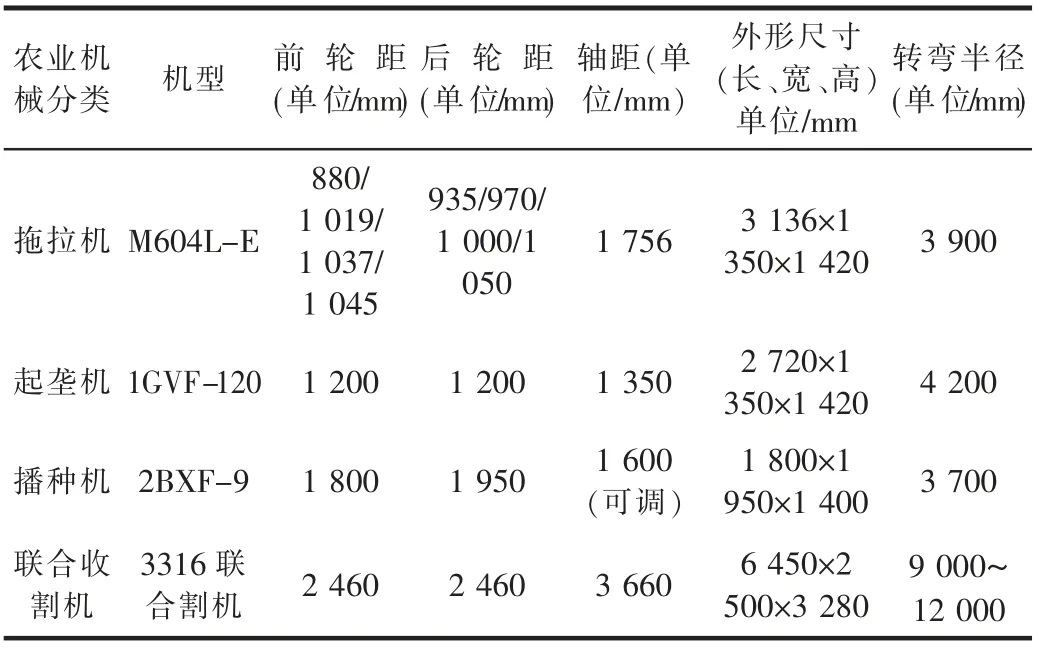
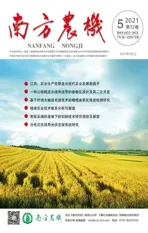
表1 常用农业机械参数一览
由表1可知,大型联合收割机外形尺寸(长、宽、高)为3 136×1 350×1 420(单位/mm),转弯半径在9 000~12 000(单位/mm)。
在进行光伏支架设计时,转弯半径过大导致光伏支架铺设密度过低,铺设范围过大,光照利用率过低。农田用光伏支架铺设宽度宜在4 200~6 000(单位/mm)。因此,可以得出如下结论:在应用常用拖拉机、起垄机和播种机的耕地,可以适用光伏支架;大型联合收割机的转弯半径过大,已经不适宜光伏支架的铺设,不能应用[3]。
1.2 支架系统的结构设计
对于支架系统材料的选择,采用C型钢材料。C型钢的质量是±1.88kg/m,每跨支架的C型钢梁有3个2m长,质量大约是11.2kg,长度是1.72m的C型钢的前后柱,质量大约是6.47kg。其他组件包括:光伏板、连杆、丝杆、转台座、联动板、丝母和联轴器。每跨支架C型钢结构总质量为47.63kg。
对于支架系统的结构,通过连轴器十字轴与连杆配合,并连接光伏电板。连杆带动一排光伏电板的转动,实现光伏电板的一套控制系统控制多个光伏电板。光伏支架系统结构设计具体如图1所示。
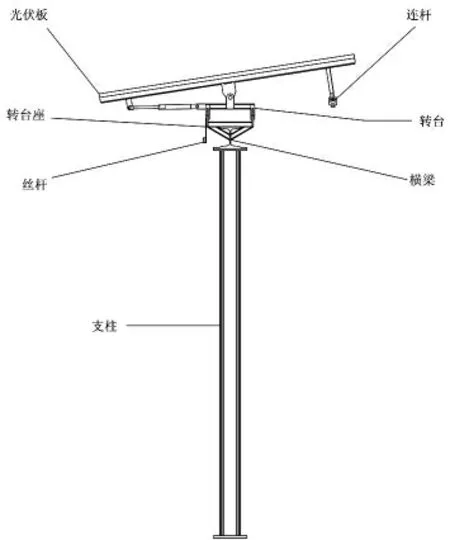
图1 支架系统的结构设计
在进行光伏支架设计时,底部需要增加水泥配重,以防止光伏支架发生倾斜甚至倒塌。为此,设计每跨支架2个底部配重,底部配重采用材料为水泥,其密度约2 500 kg/m3,前支墩为0.4m×0.4m×0.2m,一侧配重质量约为80kg。两侧配重质量约为160kg。
高度过高会使支架抗风负担加大,对支架的稳定性和安全性造成一定的不良影响。严重时可能会造成人员受伤以及财产损失。为此,农田用光伏支架高度不宜超过2.3m,可适用于除大型联合收割机外的农田。
2 追光程序的设计
追光程序的设计应充分考虑它的可靠、稳定和实用。程序设计的硬件探测装置提供了5 V电压,使用arduino nano芯片计算出太阳方位角,ds1302芯片计算出反馈。首先,外部独立测光光电传感器在当前是白天之后,控制时钟ds1302模块就开始计算,此时系统开始工作,自主测光仪竖直角舵和垂直高度角舵自动重新启动,然后开始了太阳的自动跟踪模式。单片机首先对两个固定在扇形外壳底部的水平角光电传感器进行初始化,当两者均为设定阈值并且光照强度与预先设置的差距小于原定值时,水平方位舵机就不再能运行,此时太阳的方位角是最佳的角度;当差值超出所设范围时,主控芯片arduino nano将水平角舵机控制,对比两者光电传感器的光照强度是多大,完成比较后将其偏转到那一方向,通过两者的差值变换为脉冲,使得自主测光器能够准确地检测太阳方位角。接下来对两个光电传感器进行了检测,得到了确切的太阳高度角,其检测原理与水平光电传感器相一致。该系统设定为30min运行一次,当单片机通过ds1302的时钟计算得到30min为单位的整数倍时,该系统将重新进行一次新的检测。直到外部独立测光装置检查的光照强度没有达到预先设定的阈值,即黑夜时系统不再工作,并使该装置自动恢复到初始位置即复位[4]。程序电路图如图2所示。
图2 追光程序电路图
光电感应器是用于测量太阳光线的照射强度,用来判定是白天还是黑夜。当太阳照射强度小于预定的工作光照时,即黑夜,就会给芯片关闭工作信号,自主测光器进行复位,自主测量仪不能检测,自主测量器也不能工作,舵机也不能运行,执行设备的太阳电池阵列一直保持方位角、高度角的最后不变;当太阳光照强度达到预定工作强度时,即白天,芯片控制自主测光器开始工作,水平和垂直的光电传感器开始测量光线是直射,舵机驱动自主测光器在水平0~20°、竖直0~90°范围内确定角度,执行设备也开始实施[5]。
跟踪光电感应器的功能是探测太阳方位和高度角,利用了最小差异原理。如果太阳光线和扇形的开口面以及旋转筒的开口不垂直于90°,光电传感器的输出光照强度会产生明显的偏差,将光照强度值和两个单片机的差值返回到一个单片机,利用大小的差值确定转动角,控制舵机偏向两个数值较小的方向,然后再进行差值比较。直到两个光电感器之间的光照强度值差距几乎是零,才能实现一个完整的跟踪程序。