一种3D建筑打印机的设计研究*
2021-03-12李祥付徐荣飞陈冠旭窦世轩
李祥付,徐荣飞,田 辉,陈冠旭,窦世轩
(1.河南农业大学机电工程学院,河南 郑州 450002;2.上海理工大学机械工程学院,上海 200093)
3D打印技术是一种快速成型技术,已经取得迅速发展,广泛应用于工业、航空航天、教育、医疗等诸多方面[1]。近些年在建筑业的应用也开始取得了一些成就,3D打印建筑也是依据把三维模型转化为二维图纸,分层处理,层层叠加的思想,用建筑材料一层一层的打印建筑物[2]。3D打印建筑与传统建筑方式相比低能耗、绿色环保,最大程度上达到人力、自然、建筑和谐,减少了资源浪费,引起了人们的广泛关注。建筑垃圾是产生雾霾的一个原因,而3D打印建筑不仅不产生扬尘和污染,还可以就地取材,消耗建筑垃圾和废品,打印出漂亮的建筑。
目前3D打印建筑比较成熟的是美国的“轮廓工艺”,打印所需要的打印材料从喷嘴喷出,一层一层的完成建筑物的打印,除此之外,意大利的“D-Shape”和英国的“混凝土”建造工艺也是较成熟的打印工业。3D建筑的打印方式目前大致分为整体式和装配式两种。整体式打印能一次成形,但易受到3D打印机结构尺寸的影响,所打印的建筑不能太大;装配式打印虽然不能一次成型,却可以打印尺寸大的建筑,但是需要零部件有较高的精度,打印的零部件需要人工运输和安装[3]。有时候可以结合二者的优点,同时用两种方式来完成所需建筑的打印,以实现效益的最大化。
3D打印在建筑方面除了打印房屋,也广泛用于打印建筑模型上。对于一些建筑物的装饰方面,如雕塑、花窗等,在墙上和房屋的内外表面打印这些花纹美观,可以省去后期的装饰。3D建筑打印也可以打印一些异性装饰结构。3D打印建筑相比于传统的建筑,具有强度高、建造周期短、减少很多的室外现场的工作,为未来社会智能家居奠定了基础[4]。
1 3D建筑打印机的虚拟设计及工作原理仿真
通过对3D建筑打印机进行调研分析,设计的虚拟样机整体结构,如图1所示。可以分为四个板块、架子(支撑架与固定架)、导轨(两个)、横梁、喷嘴。导轨的设计必须满足连接导轨的横梁必须能沿着导轨可以往复直线运动。横梁与导轨的设计均采用伺服电机带动同步轮,同步轮带动同步带运动,进而连接在同步带上的连接板运动,带动连接板上的喷头和横梁运动。导轨机构伺服电机带动滑块连接板的直线运动看作X轴,把横梁机构伺服电机带动滑块连接板的运动看成Y轴,架子上的伺服电机带动导轨的上下运动看成Z轴,这样就可以使喷头沿着X、Y、Z轴运动,进而完成建筑物的打印[5]。

图1 3D建筑打印机整体结构
1.1 架子结构设计
架子分为四个竖直的支撑架和四个横向固定架。四个支撑架与四个横向固定架通过M20螺栓连接。架子是用角钢焊接而成,角钢具有良好的可焊接性和塑性变形性能,具承重力强及不易变形,还具有一定的机械性能和使用寿命时间长。另外角钢还能节约成本。由于架子长度需要很长,需要做成4m左右,可以采用镀锌等边角钢焊接而成,型号为∠50×50×4,角钢材料为Q235,角钢表面的一层镀锌层,能够起到防腐和防锈的效果。每个竖直支撑架上安装一个直线电机,四个直线电机同步运动,带动导轨的上下运动。直线电机的导轨通过螺栓与架子相连,控制系统控制直线电机的上下运动。
1.2 横梁结构设计
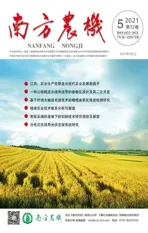
横梁结构需要带动喷头实现水平横向运动,横梁采用H型刚规格为194×150×6×9,具有截面形状合理,承载能力强,各个方向都抗弯能力强、成本低、重量轻等优点,能更好的发挥钢材的作用。横梁结构的建模如图2所示。
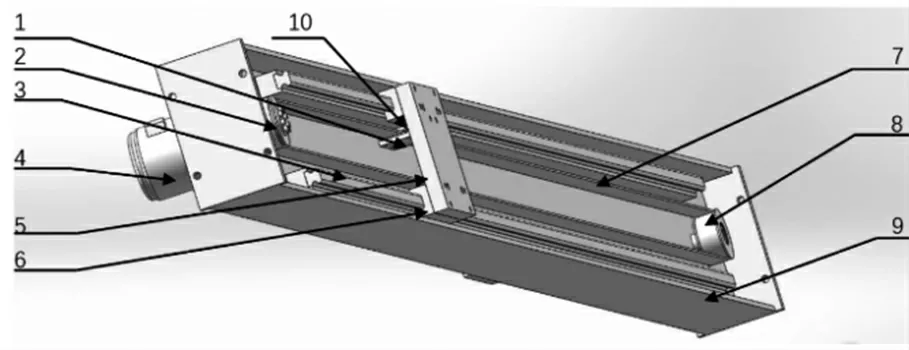
图2 横梁结构图
在H型钢上设有直线导轨、同步带、同步轮、惰轮、压板、电机、惰轮固定轴。直线导轨上有滑块和导轨。滑块固定在滑块固定板上,滑块固定板用于和喷头进行连接。齿条和压板夹紧同步带固定在滑块固定板上,电机带动同步轮转动,从而同步带带动滑块固定板运动,实现喷头的运动。控制电机的正反转来控制滑块固定板的往返运动。
同步带的选型计算,打印的速度要求为0.1m/s,同步带需要传动的总负载选为100kg,导轨与滑块之间的摩擦系数u=0.1,则同步带传递受到的力由公式(1)得:

则同步带需要传递的负载功率由公式(2)给出:

求得负载功率P=100N×0.1m/s=10W。有电机的选择可以得到,同步轮主动轮的转速为n=60r/min。由于3D建筑打印机需要良好的精度,所以要尽量避免多边形效应,提高打印的精度。圆弧齿同步带相对与梯形齿同步带多边形效应比较小,所以传动精度要比梯形齿同步带要高,故同步带齿形选为圆弧形同步带。
根据同步带需要传递负载的功率10W和主动带轮的转速60r/min可知,可以选用5M(同步带的节距为5mm)。根据国标取齿数为40。接着进行同步带节线长度计算

求得同步带得外圆直径为63.66mm,由于传动比为1,故d1=d2=63.66mm,初定中心距为3 200mm,因此可以根据公式计算出同步带的理论节线长度可有公式(3)给出:

得到节线长度L=6 599.8m。可以根据理论节线长度选取皮带,所选皮带的齿数为=6 599.8/5=1 319.8,取同步带齿数为1 320,同步带的宽度选择S5M系列最大值25mm,综上所述同步带的类型选为ECX01-S5M-250-1320。
根据同步带的选择确定同步轮,同步轮与同步带类型配套,根据同步轮的带宽、齿数等,同步带类型选择为ECC51-S5M250-40-E-d19,最大扭矩满足要求。
根据同步轮的选择确定同步轮惰轮,同步轮为M5,惰轮也应为M5。同步轮惰轮M5有单轴承和双轴承,由于同步轮的带宽为25mm,故选择双轴承的同步轮惰轮。根据齿数带轮宽度,型号选为EVD21-40-S5M250。
1.3 导轨结构设计
导轨的设计需要满足连接在上面的横梁结构往复运动,导轨有分为左导轨和右导轨,两导轨相反设计,分别连接横梁的左右两端。导轨结构的零部件有H型钢架、直线导轨、同步带、同步轮、惰轮、压板、电机、惰轮固定轴。
两个的导轨两边的伺服电机同步运动控制连接板的运动,带动横梁的运动。其中左导轨虚拟建模图如图3所示。
图3 左导轨虚拟建模图
1.4 喷头设计
喷头是实现建筑物质量好坏的核心机构,为了便于清洗和维修,把喷头设计成可拆装式结构。喷头需要具备能使建筑材料连续平稳的挤出,而且应该避免建筑材料粘附在料仓的内壁[6]。喷头结构由可拆卸喷嘴、料仓、螺旋片杆件、刮壁杆、电机固定板、电机组成。电机固定板开有进料口及横梁连接所需的螺栓孔。喷嘴和料仓设计成分离式,设有法兰盘,上面开有相同的孔径,通过螺栓和螺母连接,去实现喷嘴的可拆卸。电机和杆件通过联轴器连接。打印喷头采用伺服传动系统控制,电机减速机旋转控制喷头内的杆件转动,杆件上面的螺旋片随之转动挤压建筑混凝土向喷嘴运动,从而实现混凝土从喷嘴平稳喷出。杆件速度和建筑材料喷出的速度成正比例,可以调节电机的速度从而控制出料速度[7]。另外,此设计采用可拆卸喷嘴,可以更换不同孔径的喷嘴来调节打印尺寸,实现打印的可变性。杆件上设有刮壁杆,刮壁杆随杆件转动,利于喷头腔体内壁的混凝土材料的流出,设刮壁杆可以有效防止混凝土长时间黏附在墙体内壁而凝固。设计成喷头于料仓一起运动,可以有效避免建筑材料在管道中发生堵塞、漏料。由于螺旋片搅拌建筑材料时,杆件需要较大的扭矩,还要准确控制出料,所以可以选择伺服电机驱动。喷头结构虚拟建模如图4所示。

图4 喷头结构虚拟建模图
2 运动系统分析
喷头能否完成建筑物的空间打印,喷头需要具备在X、Y、Z轴的独立运动,控制各轴的速度来完成喷头的斜线、曲线运动,进而完成斜面及曲面的形成。设计的横梁机构和两个导轨机构伺服电机带动连接板的运动就分别对应了喷头在X轴及Y轴的往复运动在架子上的直线电机拉动横梁及导轨的运动形成了Z轴方向的运动,运动过程中喷头始终与打印建筑的平面成90°。形成三维运动的机构简单,且便于拆卸,便于运输和安装。X、Y、Z轴的运动是通过PLC控制架子上的直线电机及横梁机构及导轨机构的伺服电机实现,通过高分辨率的编码器控制运动的准确性。
3 混凝土配比对打印结果的影响
3D打印建筑成品质量好坏,与混凝土的混凝土材料是否能够从喷嘴内连续且均匀的挤出,保证挤出后层与层之间具有黏结性和足够的强度,是完成3D建筑打印的必需条件[8]。由于3D打印建筑内部没有钢筋机构,也不像传统混凝土那样整体浇筑,而是一层层打印,层层叠加而成,所以3D打印混凝土除了具备普通混凝土的性能外,还需要具备较好的黏结性、快速固化及不能倒缩的性能。磷酸盐水泥是一种非常适合3D打印的胶凝材料[9]。在3D打印混凝土里面添加粉煤灰、矿粉、纤维素醚、硅粉,可以增强混凝土的强工作性能。在3D打印混凝土里面添加粉煤灰可以提高混凝土的力学性能、持久性。粉煤灰是混凝土的一种掺合料,制造高性能的3D打印所需要的混凝土少不了粉煤灰的参与。在混凝土中加入纤维素醚也可以提高混凝土的工作性能,实验证明,纤维素醚也能改善打印混凝土的黏结性[10]。硅粉具有较多高的活性,与粉煤灰掺和一起使用能使混凝土强度得到提高。
4 结语
本文针对三自由度3D建筑打印机的设计进行研究,通过三维SolidWorks软件进行实体建模、工作原理仿真并对机器运动系统以及混凝土配比对打印结果的影响因素进行了分析。对比3D建筑打印机与传统建筑方式,结论得出新型的建筑方式比传统方式具有周期短、低成本、成型质量高、节能环保等突出优势。随着3D建筑打印机的推广以及纳米科技、人工智能、新能源产业等科技元素以及生物科技融入建筑中[11],相信在不久的将来,人类去海底打印建筑,去外星球打印房子的梦想都将会变成现实。