改进CREAM模型的船舶引航员人因可靠性预测
2021-03-10张爱琳刘晓佳
张爱琳, 刘晓佳
(集美大学 航海学院, 福建 厦门 361021)
随着“一带一路”倡议的推进,中国与各参与国之间的贸易量大幅增加,大量的商品运输将通过海运完成,进一步促进海运市场的发展和繁荣。快速发展的海运市场对船舶引航员的操作技能和综合素质的要求越来越高,而涉及引航员的船舶安全事故的数量呈现不断增加的趋势,在港内航道发生的船舶海损事故更是如此。[1-2]例如,巴拿马籍“BERANI”轮和“金沙机6688”轮在长江航道发生的碰撞事故都是引航员不规范的操作行为引起的。引航员人因可靠性是船舶进出港安全的决定性因素之一。因此,对引航员人因可靠性进行有效预测有助于保障船舶进出港安全,提升港口的竞争力。
人因可靠性分析(Human Reliability Analysis,HRA)一直是安全领域中的重要课题,认知可靠性和失误分析方法(Cognitive Reliability and Error Analysis Method,CREAM)作为第2代HRA方法广泛应用于海运领域。AKYUZ等[3]通过CREAM基本版和扩展版分别系统地预测指定任务的人因差错率(Human Error Probability,HEP),以评估液化石油气(Liquefied Petroleum Gas,LPG)船货物过程装载中的人因可靠性。AKYUZ等[4]利用HTA法将主任务分成若干子任务,分别进行HEP计算,增加其敏感性,从而建立基于风险的量化CREAM法。其他专家分别通过模糊[5-6]、简化[7]和结合[8-9]的方法对CREAM进行改进,从而更加合理简便地量化HEP。XI等[10]在上述改进基础上提出一种基于证据推理(Evidential Reasoning,ER)与CREAM的HEP定量分析法,并结合不同来源的DOBS,解决海事评估中的不确定性问题。姜菲菲等[11]利用模糊降低主观因素的影响,同时构建情景环境指数与HEP的函数关系,精确预测引航员人因可靠性。张锦朋等[12]通过将控制模式概率化获取HEP。席永涛等[13]采用模糊集合、贝叶斯网络(Bayesion Net Work,BN)和ER,对不确定信息条件下的船舶值班驾驶员操作的可靠性进行量化分析。针对引航员人因可靠性的研究大多是从单方面影响因素出发,定性地研究其人因可靠性。例如:张欣欣等[14]从人-组织因素的角度分析引航风险致因;张锦朋等[1]建立动态、静态评价指标来定量预测引航员人因可靠性。引航员的工作受个人、环境和社会等多方面因素的影响,考虑到情景环境对人因可靠性的影响,本文以引航员为研究对象,综合考虑引航员个体因素和情景环境,构建以CREAM为基础的定量预测模型,并根据CREAM的基本原理,对比YANG等[5]在CREAM中的改进,提出将先验条件概率由确定值转变为概率值,以此降低其在HEP计算中的主观性,简化海运领域中HEP的计算。
1 CREAM方法
CREAM[15]由Hollnagel于1998年建立,其提供一个包含个体、组织和环境因素的失误分类系统,通过一系列通用行为条件(Common Performance Condition,CPC)和表格描述原因与结果之间的关系。CREAM的核心是情景环境对人的认知控制模式的影响决定可能发生认知失误的概率。CREAM建立混乱型、机会型、战术型和战略型等4种认知控制模式。情景环境由组织有效性(CPC1)、工作条件(CPC2)、人机界面与运营支持的充分性(CPC3)、规程/计划可用性(CPC4)、同时出现的目标数量(CPC5)、可用时间(CPC6)、值班区间(CPC7)、培训与经验的充分性(CPC8)和成员合作质量(CPC9)等9个因数构成。将每个CPC分为若干个水平,并确定每个水平对人类行为绩效的影响(改进、不显著、降低),见表1。
CREAM法有基本法和扩展法2种,其中:基本法提供对任务可能期望的性能可靠性的总体评估;扩展法利用基本法的结果,可更深入地检查或调查任务的操作。基本法计算具有改进影响和降低影响的CPC数量确定控制模式和相应的人因差错概率区间(见图1),从而判断其人因可靠性。扩展法利用基本方法的结果,以便对人类的相互作用进行更详细的分析。

表1 CPC语义变量/描述
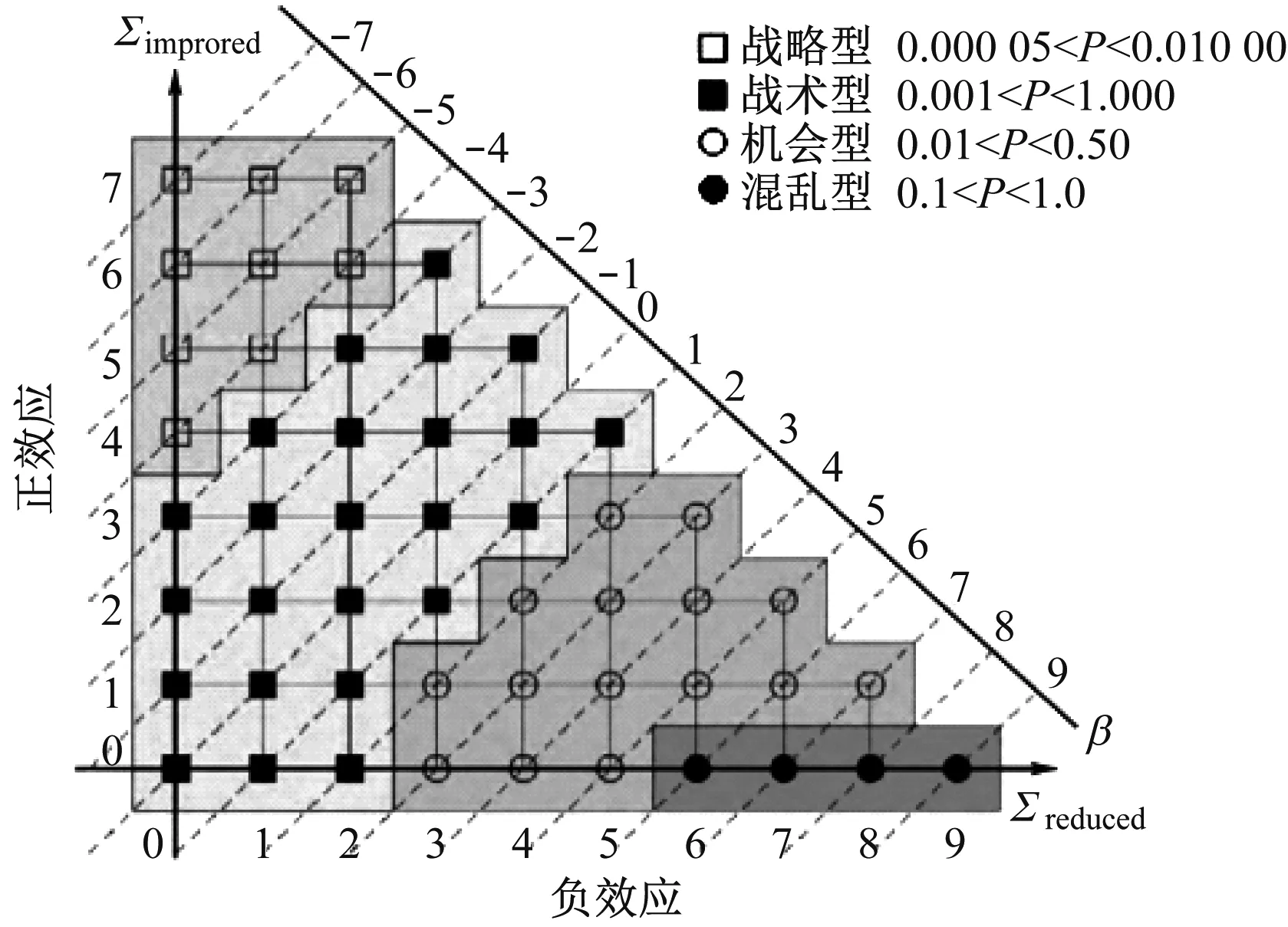
图1 CREAM基本法控制模式图
2 改进CREAM模型的建立
2.1 构建多输入多输出规则库
为分析一些难以获得或不完整的因认识功能失误导致的人因差错数据,可采用基于模糊集理论中的If-Then规则的主观评价法。[5]在传统的模糊规则库系统中,输入和输出一般用确定的单一变量表示。当用传统的规则库表示模糊性时,由于输出的结果有时不能反映微小的变化,因此传统的规则库具有一定的缺陷。考虑到船舶引航员复杂多变的任务环境,且专家不能100%肯定其对假设的支持,而仅拥有一定程度的置信度,建立一个不确定性、简易的If-Then规则库,需涉及到所有与置信度相关的可能结果。因此,本文建立一个多输入多输出的置信规则库Rk,用其表示CPC与控制模式之间的关系为
Rk: IFL1,kANDL2,kAND … ANDL9,k, THEN
{(β1,k,D1),(β2,k,D2),(β3,k,D3),(β4,k,D4)}
(1)
式(1)为在置信规则库Rk中,若输入的语义变量集合为Li,k,则输出的控制模式结果为不同置信度的4种控制模式的组合。式(1)中:Dj为4种控制模式;βj,k为控制模式对应的置信度;Li,k为CPCi对人类绩效产生的改进、不显著和降低的影响。[7]
例如,若L1表示“组织有效性”这个通用行为条件对人类绩效产生的影响,则L1,k可用4种语义变量描述,分别为效果差(L1,1)、无效(L1,2)、有效(L1,3)和非常有效(L1,4)。举例解释上述的Rk,有
R3: IFL1,3ANDL2,1ANDL3,1ANDL4,1ANDL5,1ANDL6,1ANDL7,1AND
L8,1ANDL9,1.THEN(0,D1),(0,D2),(0.5,D3),(0.5,D4)
(2)
由式(2)可知:若“组织有效性”是有效(L1,3),“工作条件”是不匹配(L2,1),“人机界面与运营支持的充分性”是不适当(L3,1),“规程/计划可用性”是不适当(L4,1),“同时出现的目标数量”是高于实际能力(L5,1),“可用时间”是连续不充分(L6,1),“值班时间”是夜晚(L7,1),“培训和经验的充分性”是不充分(L8,1),“船员合作质量”是效果差(L9,1),则该引航员将在置信度为50%的机会型和50%的混乱型控制模式下完成引航任务。
该置信规则库可映射出9个CPC与4种控制模式之间的不确定性关系,提供比传统规则库对于不确定认知更丰富、适用的方案。
2.2 CPC绩效效应评价
每个CPC中包含有限个语义变量,这些语义变量均对其行为的可靠性产生不同的影响,从而影响船舶引航员的绩效可靠性。积极的影响可使人类绩效的可靠性提高,消极的影响则相反。[16]每个CPC的主要影响都是用来预测HEP的有用工具。但是,在基本CREAM中,每个CPC的影响都是离散的和确定的(0%或100%),最终获得的失误概率预测区间太宽,且相邻的概率区间存在交叉。因此,本文先利用模糊数将离散的确定值转换成连续值[17](见表2),再通过去模糊化将连续值转换成概率值。[6]通过这种方式,可将CPC的不同重要绩效水平纳入HEP的估算中,结合CPC绩效评估的不确定性,从而降低主观性。
2.3 调整CPC依赖性
CREAM基本法利用CPC为任务环境定量描述提供一套综合的、结构化的指标体系。然而,其并不是相互独立的,而是任意存在相互耦合或依赖关系。HOLLNAGEL[15]研究CPC影响人行为绩效的作用机理,并给出调整规则见表3。
当某个CPC效应值“不显著”时,根据与其相关的其他因数效应值的共同指向(改进/降低)是否达到阈值进行修正,如表3所示。
2.4 贝叶斯网络技术建模
当模糊输入可由专家使用具有置信度的语义变量表示时,可采用BN技术对规则库进行建模,以确定控制模式。即将规则库中的置信度适当转换为贝叶斯机制中的条件概率。[6]例如第2.1节的R3可表示为
P(Dj|L1,3,L2,1,L3,1,L4,1,L5,1,L6,1,L7,1,L8,1,L9,1)=
(0,0,0.5,0.5)
(3)

表2 模糊集

表3 CPC因数调整规则
在CREAM基本法中,组织有效性、人机界面与运行支持的充分性和船员合作质量有4个水平等级,工作条件、规程/计划可用性、同时出现的目标数量、可用时间和培训与经验的充分性均有3个水平等级,值班区间有2个水平等级。这就会产生31 104个条件概率用以构建网络。为方便计算,可使用分离方法减少父节点的数量[18],将9个CPC分成3组,即
G1:CPC1,CPC2,CPC3
G2:CPC4,CPC5,CPC6
G3:CPC7,CPC8,CPC9
(4)
为以条件概率的形式表示规则库中的置信度,首先要定义离散函数fEi、fA、fG1、fG和fCOCOM。
fEi:CPCi→Ei(i=1,2,…,9)
(5)
式(5)中:Ei为CPCi对人行为可靠性产生的期望效应(改进、不显著和降低),见表4。本文可根据表4确定CPCi绩效效应的条件概率。

表4 离散函数fEi的条件概率
表3中给出的规则用来确定调整后的CPCh的条件概率函数fAh,有
fAh:(Eh+Eh,D)→Ah,h=2,5,6,9
(6)
式(6)中:Eh为CPCh自身的期望效应值;Eh,D为CPCh的依赖CPCi的期望效应值(改进/降低);Ah为调整后的CPCh的期望效应值(改进/降低)。例如调整后的CPC9因数的条件概率见表5。
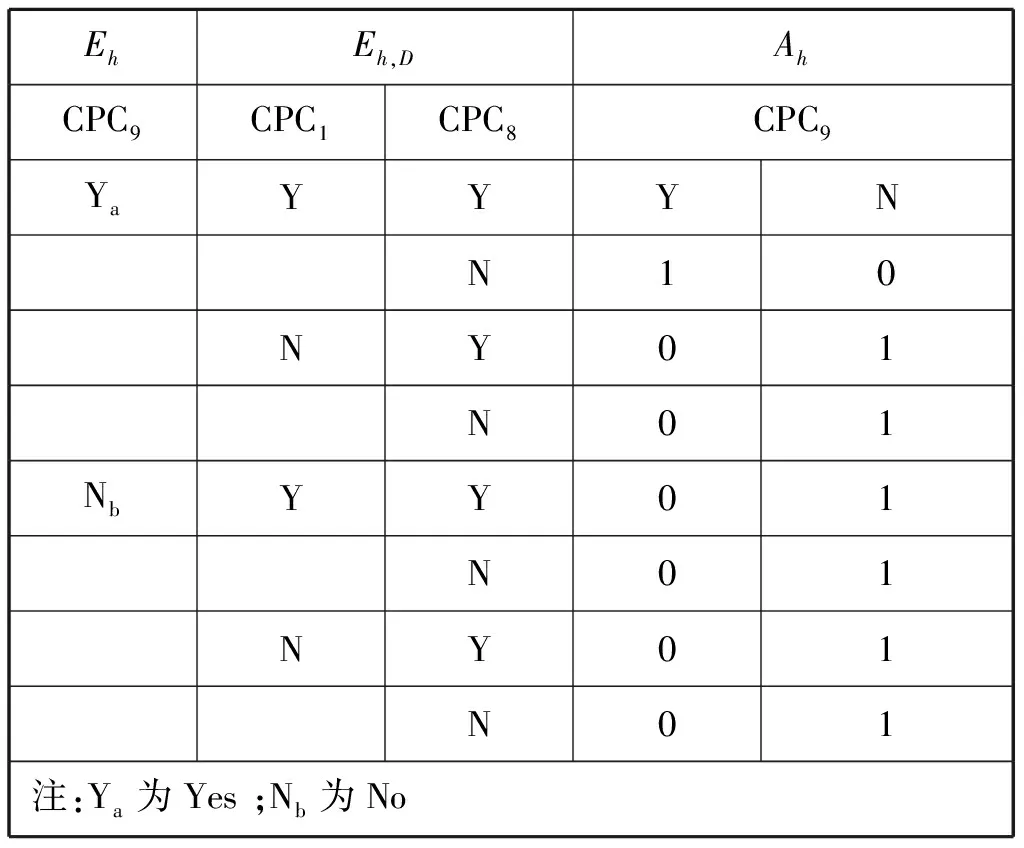
表5 调整后的CPC9的条件概率
根据表1中列出CPC的期望效应值,计算改进/降低效应值的数量,由此定义离散函数fG1和fG分别为
(7)
由表1可知:CPC5和CPC7的期望效应值不包括改进,因此fG2和fG应该被修改,可改为
(8)
式(7)和式(8)中:+为改进效应值;-为降低效应值。
fG1和fG的条件概率见表6和表7。

表6 fG1的条件概率

表7 fG的条件概率
根据图1定义函数fCOCOM。与COCOMj相对应的条件概率见表8。

表8 fCOCOM的条件概率
根据式(4),采用BN技术建立十节点会聚连接模型,有
i=1,…,9;j=1,…,4
(9)
式(9)中:P(COCOMj)为控制模式j的概率;Ji为第i个CPC的语义变量数,Ji=1,2,3,4(i=1,3,9)或Ji=1,2,3(i=2,4,5,6,7,8);P(NiJi)为第i个CPC的先验概率。
2.5 HEP计算
根据上述步骤获得的控制模式概率结果,可计算HEP。[13]HEP值越大,人类绩效可靠性水平就越低。
(10)
式(10)中:UCOCOMj为一组值{2.24×10-4,0.01,0.070 8,0.316},用以进行基准测试;j=1,2,3,4(战略型、战术型、机会型、混乱型)。
3 实例验证
3.1 实例描述
按照我国沿海某引航站的引航计划,2020年 2月 4日06:10,某引航员将要执行大型船舶管理公司的CAPE SIZE船舶自虾蛭门南锚地至武港码头的引航任务。执行任务期间,风力为5~6级,中云,阴,船舶交通量少,通航密度小;与引航相关的人机界面(Man Machine Interface,MMI)具有充分适当性,已确定船舶靠离泊时间;引航员引航资历为11 a。为保证水域通航安全,可对执行此次引航作业任务的引航员的人因可靠性进行预测,为其提供理论依据。
3.2 船舶引航员HEP计算
通过问卷调查对与CPC有关的数据进行收集,调查问卷设计30个问题,根据从“强烈不同意”到“非常同意”的5级李克特量表进行评分。例如:“人机界面与运营支持的充分性CPC3”,此CPC因数通过5个问题进行评估,如“引航员可随时查看引航调度系统”“各类助航引航信息易于获取,如船舶、港口和航道基础信息,与引航作业相关的水文、气象和船舶姿态等数据”“引航员能够及时接收动态感知数据,如船舶全球定位系统/船舶自动识别系统/北斗位置数据、船舶交通服务等雷达数据、其高频通信数据和语音数据等”“引航员便携终端智能化”等问题。对于只存在特定状态的CPC直接采用描述统计方法,例如,“值班区间CPC7”是白天或夜晚。利用5级李克特量表处理问卷,获得每个CPC的效应评价值见表9。为克服CREAM存在的不足,根据第2.2节内容,先利用模糊数将评价值转换成模糊值,再采用重心法进行解模糊操作,得到概率值。
采用MSBNx软件处理CPC的绩效效应值,构建改进CREAM模型以确定控制模式,结果见图2。
该一级引航员执行此次引航任务时可能发生HEP为0.009 4。

表9 CPC绩效效应值

图2 控制模式结果
3.3 结果分析
根据传统的CREAM基本法进行分析,只能获得该引航员在此情景环境下执行引航任务时的控制模式为“战术型”,失误概率区间为(0.000 1,1.000 0)。与基本法相比,采用本文所述方法得到的结果更准确,精度更高。
为检验模型的稳定性和有效性,采用灵敏度分析方法进行分析,结果见表9。对CPC1的评价值以10为增量进行分析,由表9可知:HEP逐步降低。组织的有效性增强,进一步对人因可靠性产生正面影响,HEP也会随之下降,从侧面证明了模型的稳定性和有效性。

表9 灵敏度分析
4 结束语
1)模型能够获得特定情景环境下引航员人因可靠性的精确值,与CREAM基本法获得的预测结果相比精度更高,可为引航员人因可靠性分析提供辅助决策。
2)提供一种简单的HRA思路,采用李克特5级评价量表收集数据,将数据转换成概率值,并基于BN,采用MSBNx软件进行分析。
3)模型只对总任务HEP进行量化,没有将复杂任务分解为简单认知行为,从而获得认知行为的HEP。
