基于LabVIEW的吞雨测控系统
2021-03-10焦岗韩阳侯海军薛卓
焦岗 韩阳 侯海军 薛卓



摘 要:本文通过Simulink建模仿真,分析在不同控制器模式下系统对阶跃信号的响应,为系统选择最合适的控制器。以此为依据完成了测控系统的电路设计、软件设计及实现。在后续的试验过程中发现,系统在控制流量的过程中出现振荡收敛以及流量信号大扰动的现象。分析后得出,由于供水系统设计的缺陷,导致经典PID控制效果不理想,采用基于LabVIEW的积分分离PID算法对系统控制软件进行改进,解决了控制过程振荡收敛的问题,并取得了较好的控制效果。此外,通过信号隔离镜像的方法解决了流量传感器同时传输瞬时流量和累积流量时,瞬时流量信号出现大扰动信号的问题。
关键词:控制 Simulink 积分分离PID LabVIEW
Abstract: Through Simulink modeling and simulation, this paper analyzes the response of the system to the step signal under different controller modes, and selects the most appropriate controller for the system. Based on this, the circuit design, software design and implementation of the measurement and control system are completed. In the course of subsequent tests, oscillation convergence and large disturbance of flow signal appear in the process of flow control. After analysis, it is concluded that the classical PID control effect is not ideal due to the defects of water supply system design. The integral separation PID algorithm based on LabVIEW is used to improve the system control software, solve the problem of oscillation convergence in the control process, and achieve good control effect. At the same time, the problem that the instantaneous flow signal appears big disturbance when the flow sensor transmits instantaneous flow and cumulative flow simultaneously is solved by signal isolation mirror method.
Key Words: Control; Simulink; Integral separation PID; LabVIEW
飛机在飞行中由于气象条件的变化,导致发动机进口可能吸入大量的雨水,这将会改变发动机的工作状态,可能造成发动机熄火、喘振、机械损坏,甚至严重的推力损失。为了模拟吞水对发动机性能和稳定性的影响,开展航空发动机吞水试验技术研究, 国军标明确了各型发动机吞水试验的依据标准和方法。
发动机装机吞水试验是验证飞机平台复杂气象环境下使用性能的重要前置试验科目,对明确飞机雨天使用限制以及化解后续试飞风险具有重大意义,是国军标明确的试验科目,更是发动机试飞的关键技术。此前,我国在20世纪80年代就曾开展过航空发动机吞水试验,但此次准备开展的工作是发动机装机状态下的试验,发动机装机状态下具有技术难度大、配套设备复杂、试验风险高等特点,于国内尚属首次。而发动机雨滴模拟装置即发动机吸雨装置,无疑是这一试验中不可或缺的重要组成部分。
为研制某型发动机吞雨装置,为解决流量控制、压力控制问题,需要研制吞雨测控系统,本文就该系统的控制问题进行探讨。
1 系统分析与建模
1.1简化框图模型
系统的简化框图模型如图1所示(以流量闭环控制为例,压力闭环控制同理)。
1.2比例阀模型
比例阀模型[1]:
现取转速5r/min,阻尼比=0.6,固有频率=0.524rad/s,流量增益,计算后比例阀模型:
1.3电机模型
电机模型[2]:
Km:电机增益系数Km=1。
Tm:电机机械时间常数Tm=0.0152。
Te:电机电气时间常数Te=0.0035。
电机模型:
1.4泵模型及放大器增益
泵模型:
Q:流量0.6 (m3/min) 。
n:转速2000 (r/min) 。
K:常数。
KB:放大器增益。
简化模型令KB×K=1。
1.5系统时域模型
系统模型如图2所示。
2 系统的动态及稳态性能
当系统模型建立完成后,选择其最合适的控制器,对后续系统设计、软件编写、系统调试都具有十分重要的指导意义。
一般而言,阶跃输入对系统来说是最严峻的工作状态。如果系统在阶跃函数作用下的动态性能[3]满足要求,那么系统在其他形式的函数作用下,其动态性能也是令人满意的。
稳态误差[4]是描述系统稳态性能的一种指标,通常在阶跃函数、斜坡函数或加速度函数作用下进行测定或计算。本文中的稳态误差只是近似计算。
该模型在不同控制器下(P、PI、PD、PID),采用阶跃输入下,系统的响应如图3所示。
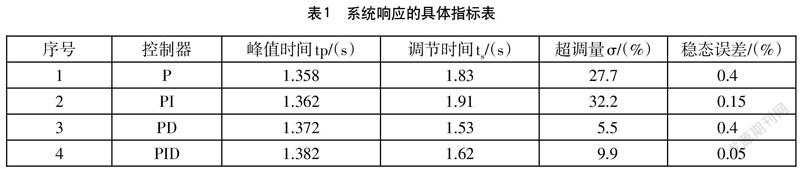
具体指标如表1所示。
由于微分控制[4]反映误差信号的变化趋势,因此它能在误差信号出现变化之前给出校正信号,防止系统出现过大的偏离和振荡。积分控制,使系统的型别增加一级,因而可以有效地改善系统的稳态精度。
通过参数比较理论上,显然在该系统中使用PID控制器较为合适,虽然相较其余3种经典控制器,损失了一些系统性能,如到达峰值时间即系统的响应速度变慢,超调比PD控制器大等,但是经典PID控制器消除了静态误差,提高了稳态精度,表明其是最适合本文系统的,故在后续设计时,控制优先采用经典PID控制器进行控制。
3 测控系统搭建及实现
要验证经典PID控制器在实际系统中能否发挥出应有的作用,首先需要设计并完成供水管路及测控系统的搭建,本文的测控系统是在供水系统搭建完成后进行设计的。在设计测控系统时,优先考虑所选元器件的可靠性及经济性[5]。
测控系统原理图框图如图4所示,由工控机加采集控制模块组成。采用研华的4路模拟量输出模块ADAM4024,进行模拟量的输出控制,对比例阀开度进行控制,从而控制供水量及供水压力。采用研华的继电器模块ADAM4068,进行继电器的输出控制,其中一路经继电器后控制电磁开关阀动作以及指示灯显示,另一路经接触器回路(星三角启动器)后控制水泵的运行状态。采用NI的16通道差分的PCI6259模拟量采集卡进行模拟量的采集,主要采集系统的压力、流量、温度等 信号。采用研华的16通道ADAM4053数字量采集模块进行数字量的采集[6],主要采集阀门到位反馈信号、泵启停反馈信号、控制按钮指令信号、液位计等开关量信号。动力电380VAC,50Hz经空气开关、断路器后给水泵、接触器主回路供电。市电220VAC\50Hz(从动力电抽引)经隔离变压器后分成三路:其中一路给显示器及工控机供电;第二路进入线性电源转换模块,转换后的电源作为测试电源,给传感器及控制模块供电;第三路进入开关电源转化模块,转换后的电源作为控制电源,给继电器线圈、接触器线圈及阀门供电。工控机上带LAN口与远程计算机进行TCP/IP通讯,同时带有鼠标键盘及显示器接口。
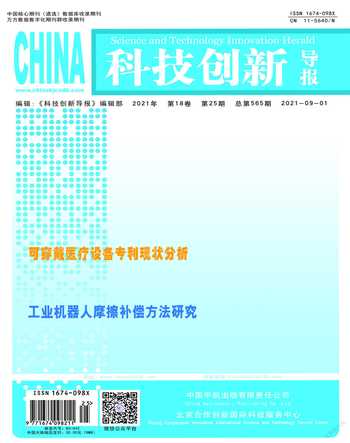
测控系统软件采用LabVIEW进行编写,运行主界面如图5所示。界面侧上部为工况显示,根据整个吞雨系统设备及管路安装布局进行画面绘制,软件运行时,实时显示设备运行状态及水路循环状态;界面左侧下部为参数曲线显示,实时显示系统采集到的传感器参数[7]、反馈信息、设定参数等信息,并可以根据需要,挑选需要显示的参数曲线;界面中间上方为参数字符串显示,以字符加单位的形式,实时显示系统的主要参数,方便操作及试验人员观察;假面右上侧为上位机下发参数表,即实时显示上位机发送参数及状态。界面中间下侧为按钮控制区域,包含手动模式、自动模式及状态控制等控制按钮,可以设定系统运行模式以及运行方式。界面右侧下部为软件运行控制及模式选择按钮,可以进行模式选择及程序启停控制、清除图标等功能。
4 实际控制时的问题及解决
4.1系统控制的问题
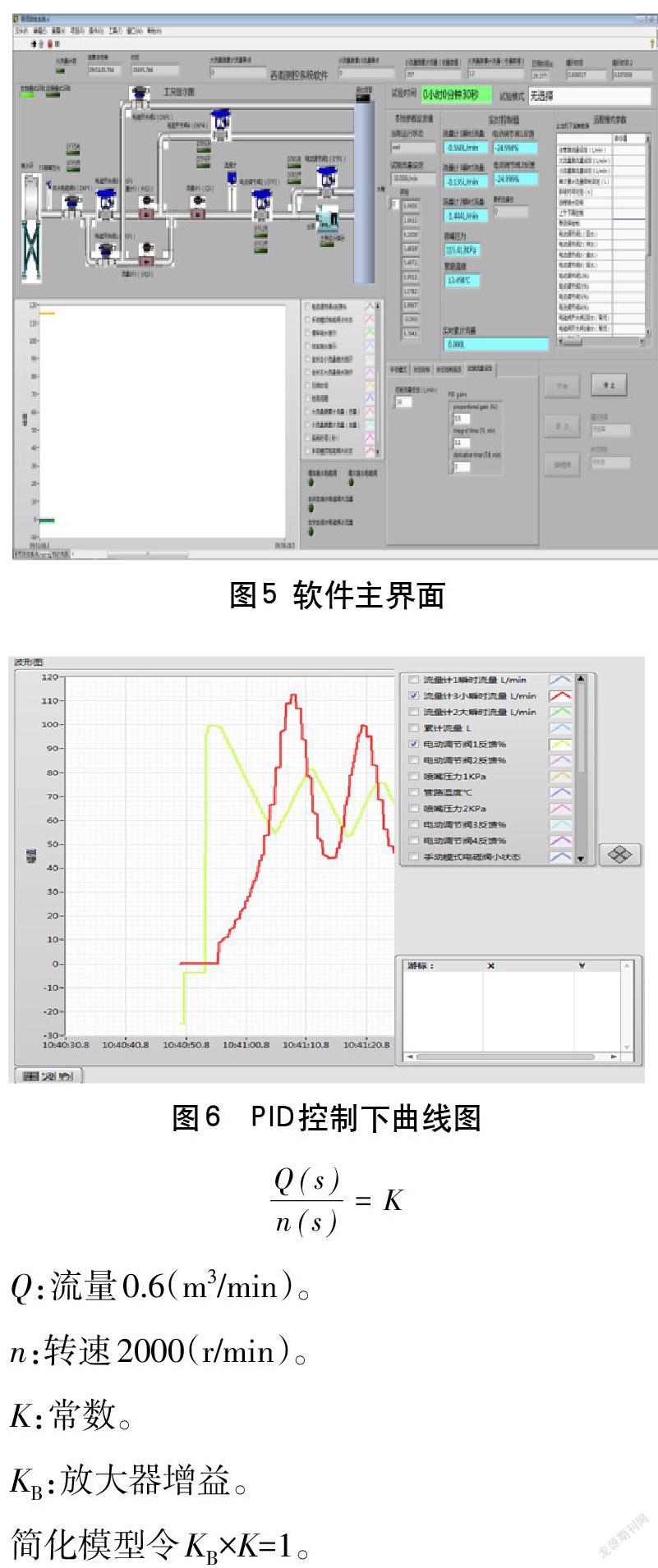
前述论证后,自动模式下该系统采用PID经典控制器进行控制,软件编写完成后,反复的调整PID参数,其实际的流量控制曲线如图6所示。
出现上述振荡收敛的原因,主要是该系统在供水系统设计时,发动机装机台比较高,为了避免供水系统处于发动机进气迎风面的考虑,供水系统整体下沉安装在地面附近。这样导致供水系统需要连接一根长管子,从喷水环下垂连接至地面附近。而由于系统供水量比较大,该管子的口径相对较大,这样一来,系统运行过程开始,需要先填充这一管路,后续流量调节也必然受这一管路影响。
由于管路较长等因素,在整个系统进行启动、结束或大幅度增减设定等操作时,即系统在短时间内输出很大的偏差时,系统整体呈现振荡收敛的控制效果。
4.2系统控制问题分析
出现这一问题后,由于受试验条件、试验影响等现有因素影响,无法实现供水系统结构更改,故只能从控制角度进行解决。为了解决这一问题,查阅资料后,认为在该系统中引入积分分离控制的方式较为合适[8]。
积分分离控制其基本原理为:被控量与设定值偏差较大时,取消积分作用,以避免由于积分作用使系统的稳定性降低,超调量增大,从而产生较大的振荡;当被控量接近给定值时,引入积分作用,以消除静态误差,提高控制精度。
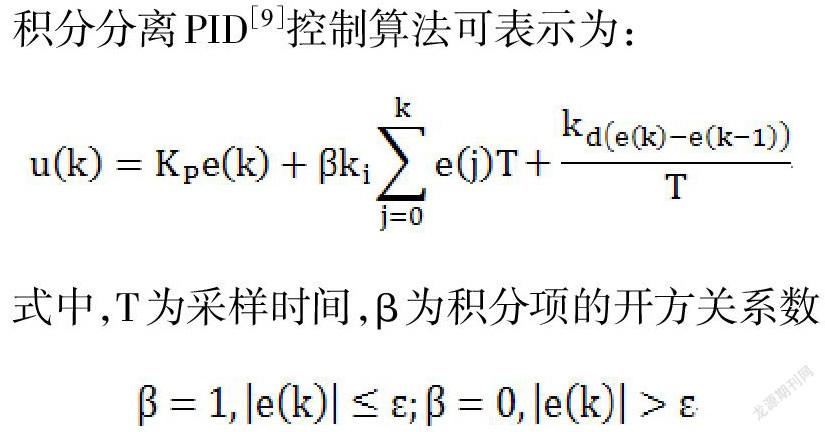
积分分离PID[9]控制算法可表示为:
式中,T为采样时间,β为积分项的开方关系数。
其中,ε为设定的阈值。
4.3系统控制问题解决
将积分分离控制器应用到本文的测控系统中,本文采用LabVIEW进行程序的编写,编写后的核心控制程序模块[10]如图7所示。即在传统的PID控制器前加入一个条件选择结构。将采集到的系统流量与设定流量进行比较,当差值大于阈值时,判定为假,此时引入PD参数给PID控制器,从而增强系统的稳定性,减小超调量;当差值小于阈值时,此时引入PID参数给PID控制器,以达到消除静态误差,提高控制精度的目的。
经过大量的调试试验,本文设计的测控系統在试验要求流量范围内,系统控制时,阈值ε设定为10时,控制效果最佳。故以10为判定值自动在PID及PD控制器之间切换。
调试后,在前述震荡收敛的状态中,采用引入积分分离PID后的软件,进行控制,控制效果图如图8所示。
由图8可以明显看出,积分分离PID对于本文的测控系统效果明显,且控制结果较好。
5、流量传感器大扰动信号的问题及解决
5.1流量传感器的问题
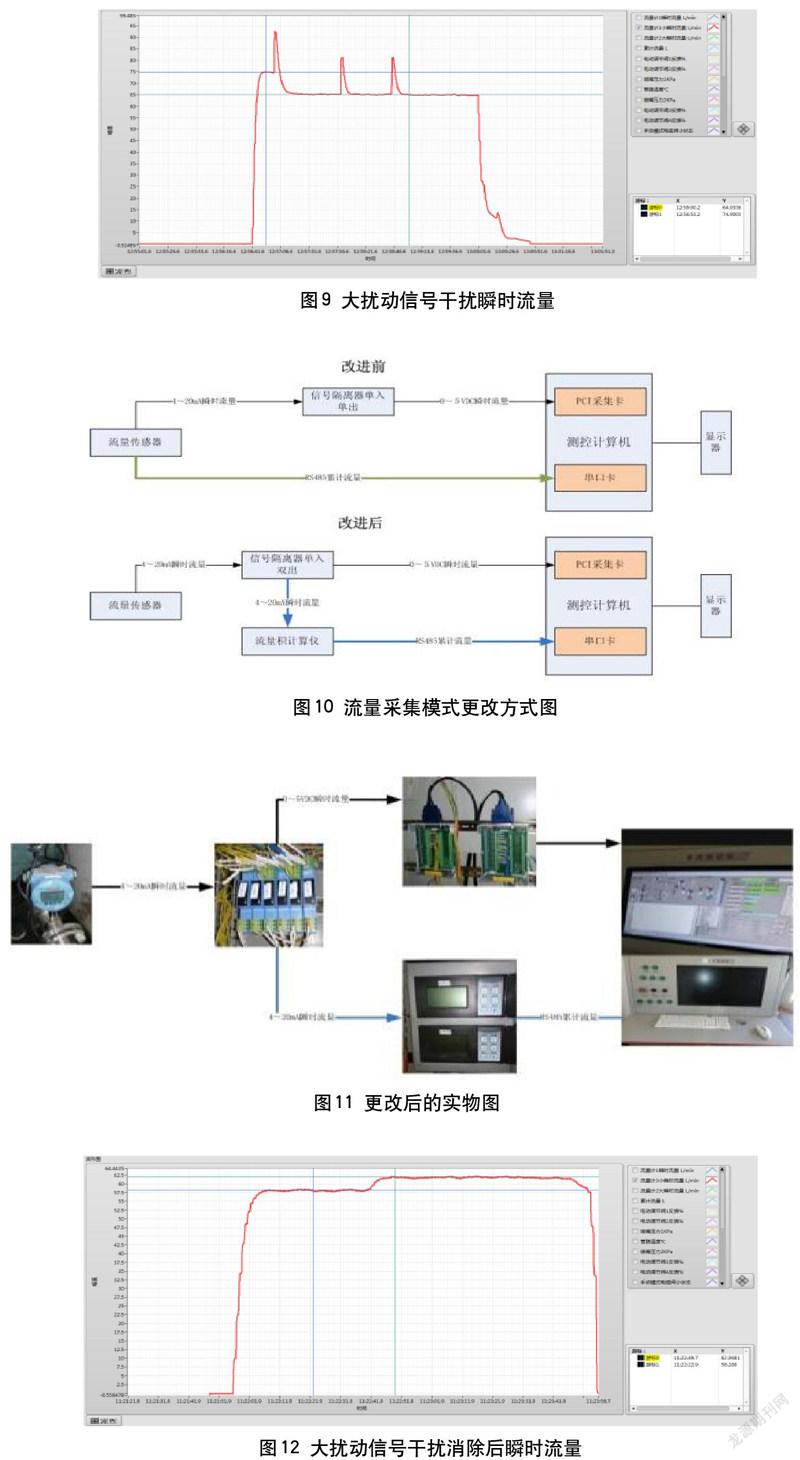
由于是首次进行吞雨测控系统设计,不可避免的总会遇到一些问题。在吞雨测控系统中要求采集瞬时流量以及累计流量,并要求较高的采集速度[11]。故在搭建系统之初,采用NIPCI6259模拟量采集卡采集瞬时流量信号,同时通过RS485模块读取累积流量信号。系统搭建完成后,在实际使用中发现,采集过程中发现瞬时流量信号不定期会发生大扰动信号干扰。扰动信号如图9所示。
5.2流量传感器问题分析
分析数据,可以发现,扰动出现的时间并没有规律性,而出现扰动的振幅基本一致,可以初步判断出,该扰动信号是系统本身引起的。该信号为模拟量采集端口,在系统运行过程中,通过仪表监视这一端口,发现监测的数据扰动与图9一致。
在排除管路、阀门、电路及采集卡等的因素外,将问题归结为流量传感器本身的问题,是由于其内置算法及电路的原因,当同时使用瞬时与累积通道时产生了该问题。与厂家沟通后,由于该产品为硬件固化成熟产品,无法从产品方面解决该问题,因此只能改变吞雨测控系统的设计进行解决。
由于在设定不同流量时,观察该扰动,发现并无特定规律,故在软件上进行信号滤波[12]比较困难(无法进行比例、奇值、数值等滤波),故选择进行电路更改。
5.3流量传感器问题解决
更改后的电路原理框图如图10所示。将流量传感器的瞬时流量信号,经信号隔离器后一分为二,其中一路直接进入PCI6259模拟量采集卡,作为瞬时流量,另一路进入流量积计算仪,转换为累积流量,通过串口信号进入测控计算机。
更改模式后的实物图如图11所示。
更改完成后,系统运行后,瞬时流量信号如图12所示,没有发现该信号出现,系统运行正常。至此,大扰动信号干扰消除。
6 结语
通过对系统典型环节进行建模仿真分析,分析系统在不同控制器下的响应,从而选出了理论上最合适的控制器。由于供水系统设计的缺陷,导致经典PID控制效果不理想,查阅大量资料后,引入积分分离PID概念,同时将LabVIEW与积分分离PID完美结合,解决了经典PID在该系统中振荡收敛的问题,系统得到了较好的控制效果。由于流量计本身的原因,导致在系统运行时,瞬时流量出现大扰动信号。在彻底分析原因后,制定更改吞雨测控系统电路的可行性方案,即采用信号隔离镜像的方法解决流量传感器同时传输瞬时流量和累积流量时,瞬时流量信号出现大扰动信号的问题。通过理论与实际的结合,理论与工程的结合,解决了一系列问题,完成了模型发动机吞雨测控系统的研制,同时圆满完成了试验任务。
参考文献
[1]宋志安.基于MATLAB的液压伺服控制系统分析与设计[M].北京:国防工业出版社,2007.
[2]鲁俊,陈明新.离心泵H∞控制系统研究[J]. 铜仁学院学报,2018,20(3):68-75.
[3]卢京潮.自动控制原理[M].西安:西北工业大学出版社,2004.
[4]胡寿松.自动控制原理第五版[M].北京:科学出版社,2007.
[5]卢艳军.传感与测试技术[M].北京:清华大学出版社,2012.
[6]李云龙.电力现场监测数据采集和移动数据同步技术[J].科技创新导报2020,17(1):34-35.
[7]熊晓倩.嵌入式系统传感器的设计与应用研究[J].科技创新导报,2020,17(20):1-2,5.
[8]黄忠霖.控制系统matlab计算及仿真[M].北京:国防工业出版社,2008.
[9]陈树学.LabVIEW实用工具详解[M].北京:电子工业出版社,2014.
[10]金诗博,门武斌.基于LabVIEW机器视觉的制品加工炉流量计识别监控系统[J].科技资讯,2019,17(22):34-36.
[11]焦岗,李雅静.基于RT系统的高速液压缸測控系统设计[J].计算机测量与控制,2018,26(11):85-88,107.
[12]宋晓健.基于自适应RB F神经网络的连续压力波信号滤波方法[J].西安石油大学学报:自然科学版,2021,36(4)83-90,97.
3569500338296