象限探测器放大组件带宽设计方法研究
2021-03-08孟庆安蒋泽伟高伟翔樊红英
孟庆安,蒋泽伟,王 询,高伟翔,樊红英
(西南技术物理研究所,成都 610041)
引 言
象限探测器放大组件通常置于激光导引头的最前端,由四象限光电探测器、跨阻放大器(trans-impedance amplifier,TIA)模块、可变增益放大器(variable gain amplifier,VGA)模块以及比例放大模块组成,是激光导引头捕获目标、判断目标位置的重要部件,其性能直接决定了激光导引头的探测灵敏度和探测距离[1]。面对当前日益复杂的战场环境,提高激光导引头的探测距离、增强战场适应性已经成为激光导引头性能提升的重要发展方向,也使得优化象限探测器放大组件设计、提升激光导引头探测灵敏度成为激光导引头光电探测系统设计的关键技术[2-5]。在激光导引头光学系统不变的情况下,提高其探测灵敏度的本质是降低象限探测器放大组件的最小可探测功率,最直接的方法是选用最小可探测器功率更低的象限探测器,但是由于激光探测器的研制技术限制,难以大幅度降低高速、大靶面象限光电探测器的最小探测功率。因此,利用照射激光信号和噪声的频率谱分布特性的差异,通过选择合适的系统带宽,减少有效信号频率成分损失,降低累积噪声幅值,提高象限探测器放大组件输出信号信噪比成为了提升激光导引头探测灵敏度行之有效的方法之一[6-9]。本文中根据该原理,采用数值仿真方法,定量分析象限探测器放大组件带宽与激光导引头探测灵敏度的关系,完善象限探测器放大组件带宽设计方法,以提高导引头的探测灵敏度。
1 象限探测器放大组件数学模型设计
激光导引头中的象限探测器放大组件采用级联式放大结构,由四象限光电探测器、TIA模块、VGA模块和比例放大模块顺序级联。其中,四象限光电探测器可等效为4只相互独立的光电二极管,因此象限探测器放大组件可等效为4路结构相同的信号传输信道,其等效电路结构如图1所示。
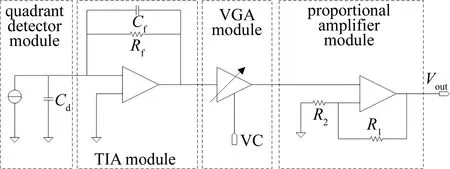
Fig.1 Circuit structure of quadrant detector amplifier module
图1中,将四象限探测器的光电二极管等效为理想电流源和结电容,与基于跨阻放大结构的TIA模块组合构成具有低通滤波特性的光电转换功能模块,将接收到的脉冲光信号转化为电压信号,并滤除脉冲信号中的高频分量后,按传输顺序传输至VGA模块和比例放大模块,进行信号放大后,输出至后端的信号处理模块并进行相关处理[10-12]。
根据象限探测器放大组件的工作原理,按照信号和噪声传输特性差异,将象限探测器放大组件数学模型的总体结构设计为如图2所示。

Fig.2 Mathematical model of quadrant detector amplification module
该模型主要由TIA模块传递模型HTIA(s)、VGA模块传递模型HVGA(s)、比例放大模块传递模型HPA(s)以及内部噪声传递模型Hn(s)组成。
1.1 TIA模块传递模型
TIA模块传递模型如图1所示。由TIA电路和象限探测器中的光电二极管组成,其中TIA电路采用基于运算放大器的跨阻放大模式。运算放大器、反馈电阻与光电二极管的结电容Cd组成双极点低通滤波电路,使用其信号传递模型为:

(1)
式中,ωZF为反馈零点角频率,ωZF=1/[Rf(Cd+Cf)],ωPF为反馈极点角频率,ωPF=1/(RfCf),ωc为运算放大器的单位增益交叉频率,Cd为光电探测器结电容,Rf为反馈电阻,Cf为反馈电容,s为复变量,s=jω,ω为角频率。
1.2 VGA模块传递模型和比例放大模块传递模型
VGA模块由固定放大器和电阻衰减网络组成,通过控制选通开关调整电阻网络分压来实现增益调整。因此,VGA模块的信号带宽由固定增益放大器决定,增益调整仅影响传递函数幅值,其传递函数HVGA(s)的数学模型如下式所示:
(2)
式中,Ag为固定增益放大器的增益值,ωc,f为固定增益运算放大器的单位增益交叉频率,A为VGA模块增益值。同理,比例放大模块为典型的正向放大结构,其传递函数模型如下式所示:
(3)
式中,Ap为固定增益放大器的增益值,ωc,p为运算放大器的单位增益交叉频率。
1.3 内部噪声传递模型
由于象限探测器放大组件由多级放大模块级联而成,前级放大模块的噪声将通过后级放大器的传递函数被放大。因此,内部噪声传递模型仅考虑TIA模块内部噪声传递。
TIA内部噪声包括:电阻输入电流噪声en,R,放大器输入电流噪声en,i和放大器输入电压噪声en,U[13-17]。通常TIA模块的输入偏置电流及输入电流噪声密度低至fA级,远小于电流其它噪声分量,可忽略不计。电阻输入电流噪声经过简单转换后,可与放大器输入电压噪声使用相同的传递模型。因此可推导出象限探测器放大组件内部噪声传递模型如下式所示:

(4)
2 象限探测器放大组件带宽设计
建立象限探测器放大组件数学模型后,采用数值仿真方法,对象限探测器放大组件带宽和探测灵敏度的关系进行定性分析可知,在任意固定脉冲宽度的脉冲激光激励下,象限探测器放大组件必定存在且仅存在一个特定的带宽值,当放大组件带宽等于该带宽值时,激光导引头可获得最高的探测灵敏度,本文中将该带宽值定义为象限探测器放大组件的最佳带宽值。
象限探测器放大组件设计时,首先要解算出象限探测器放大组件最佳带宽值,并根据最佳带宽值对象限探测器放大组件硬件参量进行调整,使其系统带宽等于最佳带宽值,从而保证激光导引头获得最高的探测灵敏度。
2.1 象限探测器放大组件最佳带宽理论值计算
由于象限探测器放大组件根据照射激光信号和噪声的频率谱分布特性差异进行带宽设计,以获得最佳的探测灵敏度,因此其最佳带宽值由照射激光信号脉冲宽度决定。目前激光制导中使用脉冲宽度为5ns~50ns的钟形脉冲激光作为照射激光,利用象限探测器放大组件数学模型,在时域上进行数值仿真,得出照射激光脉冲宽度与象限探测器放大组件最佳带宽值的关系曲线,如图3所示。由于象限探测器放大组件的噪声信号可近似为白噪声,噪声的幅值与系统带宽的平方根成正比,且比例系数不随带宽变化为变化;而照射激光为钟形波,象限探测器放大组件对其响应信号幅值的抑制作用随着其脉冲宽度增大而非线性减小。因此,为了降低噪声对输出信号信噪比的恶化效应,获得最佳的探测灵敏度,象限探测器放大组件的最佳带宽值会随着激励激光脉冲宽的增加而减小,其变化趋势呈现非线性。

Fig.3 The relationship between the pulse width and the optimal bandwidth
而从频域角度进行分析,假设脉冲激励信号的脉冲宽度为τ的标准钟形波,经过傅里叶变换后,其频域幅值曲线为标准高斯曲线,根据高斯函数特性,将幅值等于最大值的78%时对应的频带宽度定义为脉冲信号的等效带宽,拟合象限探测器放大组件最佳带宽与激励脉冲等效带宽的关系曲线如图4所示。

Fig.4 The relationship between the equivalent bandwidth of laser pulse and the optimal bandwidth
可以看出,象限探测器放大组件最佳带宽值f-3dB随脉冲信号等效带宽值增大而增大,其变化趋势可近似为线性。若已知照射激光的脉冲宽度为τ,则可根据下式计算出象限探测器放大组件最佳带宽理想值f-3dB:
(5)
而在实际设计中,由于电子元器件参量误差以及环境因素影响,无法保证系统带宽值f-3dB,real与最佳带宽理想值f-3dB完全相等,其差值定义为系统带宽设计相对误差Δf=(f-3dB,real-f-3dB)/f-3dB。为了评估系统带宽设计误差对探测灵敏度的影响,将脉冲宽度分别为10ns,20ns和40ns的脉冲信号作为激励信号,利用象限探测器放大组件模型进行数值仿真,其结果如图5所示。
Fig.5 Influence of bandwidth design error on detection sensitivity
图5中横坐标为系统带宽设计相对误差,纵坐标为探测灵敏度相对变换值ΔPr,min=(Pr,min,real-Pr,min)/Pr,min,其中Pr,min为探测灵敏度理想值,Pr,min,real为实际值。通过对比可看出,虽然象限探测器放大组件的最佳带宽理论值不同,但其探测灵敏度随带宽变化的相对变化率基本一致。其探测灵敏度对系统带宽设计误差的容忍度较高,当带宽设计误差小于20%时,可保证探测灵敏度损失小于1%。
2.2 噪声对象限探测器放大组件最佳带宽理论值影响分析
由四象限光电探测器引入的外部噪声与放大组件内部噪声的传递函数不同,导致两类噪声以不同权重进行叠加时,形成的噪声频率谱曲线形貌不同,从而影响放大组件的最佳带宽值。
图6为基于象限探测器放大组件数学模型的噪声与放大组件最佳带宽值关系的仿真分析结果。其中内部噪声和外部噪声幅值比为无量纲量。由于内部噪声传递函数为(4)式,其带宽由光电探测器结电容和反馈电阻主导,带宽值远小于系统带宽,故其输出噪声幅值不随系统带宽变化而变化。当内部噪声主导系统噪声特性时,放大组件需要通过增大系统带宽,提高响应信号输出幅值,从而优化输出信号的信噪比。因此,当内部噪声主导系统噪声特性时,放大组件的最佳带宽值会大于根据(5)式计算出的最佳带宽理论值,并随着内部噪声的占比增加而升高,同时系统带宽的增加,也会同时增加后端信号处理系统的设计难度。

Fig.6 Relation curve between noise characteristics and detection sensitivity
因此,在象限探测器放大组件设计时,需选择输入噪声电压远小于外部噪声的运算放大器作为TIA模块的主放大器,保证系统最佳带宽值与(5)式计算出的最佳带宽理论值相同,同时尽量降低系统带宽,降低后端电路设计难度。
3 象限探测器放大组件带宽设计方法评估验证
本文中以国外某型激光导引头中使用的象限探测器放大组件为例,利用象限探测器放大组件带宽设计方法对其带宽进行改进设计,并通过电路仿真软件,对改进前后组件的最小可探测功率参量进行实验比对,验证象限探测器放大组件带宽设计方法的可行性和有效性。
目前某型激光导引头使用的象限探测器放大组件的系统带宽设计为2MHz,其主要技术参量为:照射激光脉冲宽度典型值τ=20ns、象限探测器结电容Cd=15pF,象限探测器噪声等效功率PNEP=15pW/Hz1/2,前置放大器放大倍率为10000V/A。根据照射激光脉冲宽度τ结合(5)式得出探测器象限探测器放大组件系统最佳带宽理想值f-3dB=17.5MHz;系统各级连部件间采用等带宽设计,TIA模块、VGA放大模块以及比例放大模块的带宽值均为f-3dB,c=25.1MHz。
3.1 可行性验证
根据上述象限探测器放大组件的主要技术参量,使用MULTISIM电路仿真软件,搭建象限探测器放大组件仿真电路。通过调整电路参量,改变系统带宽值,分别测量系统带宽为3.3MHz,4.9MHz,7.8MHz,11.0MHz,14.5MHz,17.9MHz,21.2MHz以及27.6MHz时,在相同激励下的输出信号信噪比,并拟合出信噪比随频率变化的曲线,如图7所示。
Fig.7 Relation curve between bandwidth and SNR of quadrant detector amplifier
图7中将电路仿真得出的带宽-信噪比变化曲线与利用象限探测器放大组件带宽设计方法进行数值仿真得出的结果做对比,可以看出,两种不同的仿真方法得出的曲线变化趋势基本一致,且均存在唯一的最佳带宽值。使用电路仿真得出的最佳带宽值约为18MHz,与利用象限探测器放大组件带宽设计方法,计算得出的最佳带宽值基本一致,其相对误差小于5%。通过分析,引起该相对误差主要原因是图4所示激励脉冲等效带宽与放大组件最佳带宽关系曲线的非线性。而结合图5进行分析,该相对误差对探测灵敏度的影响小于0.1%,可忽略不计。
通过上述验证实验证明,象限探测器放大组件带宽设计中数值仿真及分析过程正确,同时也证明:使用象限探测器放大组件带宽设计方法,通过控制象限探测器放大组件带宽使其等于最佳带宽值,可提高激光导引系统的探测灵敏度。
3.2 有效性验证
为了定量评估象限探测器放大组件带宽设计方法对某型激光导引头中使用的象限探测器放大组件的探测灵敏度优化程度,使用MULTISIM仿真软件,采用等带宽结构,搭建系统带宽分别为2.4MHz和17.8MHz的象限探测器放大组件仿真电路,对其输出信号的特性仿真,其结果如图8所示。
Fig.8 Output response signals of different bandwidth quadrant detector amplification components
图8a是系统带宽为17.8MHz时,象限探测器放大组件输出信号时域波形;图8b是系统带宽为2.4MHz时,象限探测器放大组件输出信号的时域波形。通过对比可以直观地看到,在相同信号激励下,当放大组件带宽等于最佳带宽值时,其输出信号的信噪比明显优于带宽为2.4MHz时。同时,将系统带宽等于最佳带宽值时的放大组件的输出特性与带宽为2.4MHz时放大组件的输出信号特性参量进行定量比对,其结果如表1所示。
Table 1 Comparison table of output signal and noise amplitude
由比对结果可知,在相同脉冲激光照射下,象限探测器放大组件带宽改进设计后,其输出信号的信噪比较改进前提升了约8dB。若激光导引头光学系统参量不变,使用象限探测器放大组件设计方法对象限探测器放大组件的带宽改进设计后,某型激光导引头的最小可探测功率下降约60%。由此可证明象限探测器放大组件带宽设计可有效地提升激光导引头的探测灵敏度。
4 结 论
通过象限探测器放大组件数学模型设计及数值仿真分析,提出象限探测器放大组件最佳带宽值概念,并总结出象限探测器放大组件带宽设计方法,使用该方法通过照射激光的脉冲宽度,可定量解算出象限探测器放大组件最佳带宽值,当象限探测器放大组件系统带宽等于最佳带宽值时,激光导引头可获得最高的探测灵敏度。同时,本文中通过电路仿真验证实验,证明象限探测器放大组件系统带宽设计方法正确可行,同时使用该设计方法对某型激光导引头象限探测器放大组件的带宽改进设计,并进行电路仿真比对实验,实验结果证明,该方法可有效提升激光导引头探测性能,改良后激光导引头最小可探测功率较原设计下降60%,探测灵敏度明显提升。
