多波束测深系统和侧扫声呐在港口扫海测量中综合应用
2021-03-08刘军廷
蔺 岩,李 芸,刘军廷
(1.宁波冶金勘察设计研究股份有限公司,浙江 宁波 315041;2.宁波诺丁汉大学,浙江 宁波 315199)
马迹山港位于浙江省嵊泗县海域,呈东南、西北狭长走向,东南到浪岗山东南,西到马迹山码头西,中心长约86 km。区域是亚热带海洋性季风气候,风力、风向随季节变化显著,季节出现时间落后于大陆。冬季盛行西北风,平均风速5~7 m/s,其中1、2月最大达9级,寒潮南下时,会出现大风。夏季受太平洋高压影响,6—8月盛行偏南风,平均风速4~6 m/s,春、秋季节则为两季风的过渡时期。5月份开始受台风影响,5—6月间,偶有台风从正面袭击的可能,7—9月为台风盛期,登陆本区的台风96%集中在这3个月中,10月中旬以后已无台风登陆。受台风正面袭击时,伴有狂风暴风,最大风力可达12级以上,危害极大。潮流方向外海为回转流,沿岸和航道内一般为往复流,流向平行于岛岸和水道方向,流速一般为2~3 kn。该区域是亚热带海洋性季风气候,风力、风向随季节变化显著,季节出现时间落后于大陆。
本文以马迹山港扫海测量项目为依托,采用多波束测深系统和侧扫声呐进行扫海测量。其中,多波束测深系统可以获得较为精确的平面位置和深度,但由于分辨率的局限,当开角变大时,对海底反映的详细度相对较差[1-2];侧扫声呐可以获取目标区域高分辨率的二维平面影像,但位置信息及水深数据精度较低[3-5]。通过对港池、航道等地物的地形地貌数据进行研究,发现两种扫海测量方式之间可以很好地互补。利用多波束声呐和侧扫声呐图像的匹配融合,可获得具有高精度和高分辨率的海底地形与地貌叠加图像,为航道疏浚提供数据服务,为确保船只的航行、靠泊等提供依据。
1 采用基准系统
坐标系统是描述物质存在的空间位置(坐标)的参照系,通过定义特定基准及其参数形式来实现。深度基准是计算水体深度的起算面,深度基准与国家高程基准之间通过验潮站的水准联测建立联系。高程系统是指相对于不同性质的起算面(大地水准面、似大地水准面、椭球面等)所定义的高程体系。由于本次扫海测量的成果要符合国家海图规定,因此根据《海道测量规范》选取测量基准系统如下。
(1)坐标系统:CGCS2000坐标系统,3°带高斯投影,中央子午线123°。
(2)深度基准:当地理论最低潮面。
(3)高程系统:1985国家高程基准。
2 多波束扫海测量
多波束测深系统是一种高精度、高分辨率、高效率的一种水下地形测量技术[6],该系统通过声波发射与接收换能器阵进行声波广角度发射和定向接收,在与航向垂直的垂面内形成条幅式高密度水深数据,从而能够绘制出沿航线一定宽度条带内海底的三维地形、地貌,并根据水下结构周边的海底地形变化情况。
多波束系统基本上由三部分组成。第一部分是多波束主系统,主要包括换能器阵列、收发机和处理单元等;第二部分为辅助系统,包括定位系统、运动传感器(横摇、纵摇、升沉)、罗经(船艄向)和声速剖面仪;第三部分是后处理系统,包括数据采集系统和数据处理计算机、数据存储设备和绘图仪等[7]。
根据《海道测量规范》要求,多波束扫海测量前需进行潮位站的布设、潮面的确定、水位改正等工作,保证测量的准确性后方可进行扫海测量。
2.1 验潮站布设
由于马迹山港东西跨度较大,根据《海道测量规范》要求,潮位站的布设应能控制全测区的潮汐变化,相邻验潮站之间距离应满足最大潮高差不大于1 m,最大潮时差不大于2 h。在整个测区范围内设立嵊泗工作船码头、黄龙岛、浪岗山和庙子湖共4个临时潮位站进行同步观测,同时抄取嵊山长期潮位站的同步潮位资料。利用5个潮位站的潮汐分析,各验潮站之间的潮时、潮差关系为:工作船码头与黄龙岛间最大潮高差0.27 m,最大潮时差10 min;黄龙岛与浪岗山间最大潮高差0.67 m,最大潮时差63 min;浪岗山与庙子湖间最大潮高差0.23 m,最大潮时差24 min。4个潮位站的地理位置情况分别如下:嵊泗工作船码头潮位站位于嵊泗县马迹山码头东侧约340 m,黄龙岛潮位站位于嵊泗县黄龙乡长山嘴山西南侧约150 m,浪岗岛的浪岗山潮位站位于嵊泗县黄龙乡浪岗山横峙村海边,庙子湖潮位站位于普陀区东极镇庙子湖岛客运码头。嵊山长期潮位站位于嵊泗县嵊山岛码头。
(1)理论最低潮面的确定
理论最低潮面的确定最常用的传递推估方法是潮差比传递法。利用测区附近已有长期潮位站的深度基准面估算可以得到临时潮位站的深度基准面。
潮差比传递法见式(1)。

式中,RA、RB分别为长期潮位站、临时潮位站的同步水位观测期间高低水位潮差的平均值;L(xA,yA)、L(xB,yB)分别为长期潮位站、临时潮位站的理论最低潮面。
根据上述公式计算得到测区各验潮站深度基准面成果见表1。

表1 各验潮站深度基准关系表 单位:m
(2)水位改正
水位改正方案如下:黄龙岛以西海域的水深测量资料采用工作船码头和黄龙岛临时潮位站的水位资料进行两站水位改正,黄龙岛和浪岗山之间海域的水深测量资料采用黄龙岛和浪岗山临时潮位站的水位资料进行两站水位改正,浪岗山以东海域的水深测量资料采用黄龙岛、浪岗山和庙子湖临时潮位站的水位资料进行三站水位改正。
2.2 多波束水深测量
本文礁石区测量采用SONIC2024多波束测深系统进行测量,其主要技术性能为带宽为60 kHz,波束工作频率为200~400 kHz,覆盖宽度为10°~160°,最大量程500 m,最大发射率为75 Hz,量程分辨率为1.25 cm。
多波束测深系统在测量定位上一般采用DGPS或RTK的方式,DGPS定位精度可达到亚米级[7]。本文使用美国Trimble公司生产的SPS351型DGPS系统进行定位。
为验证坐标转换参数的正确性和可靠性,测量前在测区内已知控制点上进行定位比测。
平面定位中误差计算见式(2)。

式中,Xp0、Yp0为已知控制点坐标;Xpi、Ypi为实测控制点坐标。
对20组测量数据进行统计,平面点位中误差为±0.31 m,满足《海道测量规范》要求。因此采用DGPS定位的方式精度可靠。
(1)布设测线和重叠带计算
布设测线时注意了测线间距的选择,实际测量时的扫测条带宽度取决于水深,所以设计的测线间距根据测区水深和仪器性能指标来确定,确保了两条相邻测线间的扫测条带达到规定的重叠覆盖比例。在海上外业作业期间要根据实际水深情况和现场作业环境情况合理调整测线间距,以避免出现漏测或不必要的过量重叠,从而提高工作效率。
重叠带计算见式(3)。

式中,E0为测量船定位中误差;m1为由测量船测定声呐头位置的定位中误差;m2为定位点中误差;E1为测量船偏航系统误差。
根据上述公式计算结合测区水深区域特征,得到如下结果:水深20 m以上,测线间隔为80 m;水深在17~20 m,测线间隔为60 m;水深在13~17 m,测线间隔为40 m;水深在8~13 m,测线间隔为20 m。
(2)多波束系统的校正及声速测量
多波束系统的各项校正:参数校正包括横摇偏差、纵摇偏差、艏摇偏差和导航时延。横摇偏差、纵摇偏差、艏摇偏差的产生主要是由于系统换能器安装的几何误差引起的,导航时延主要是数据传输的延迟引起的,是定位仪器本身固有的。这些误差将会影响测深精度和位置精度,所以海上测量之前对这些参数进行专门的测定。经过校正后参数如图1所示。

图1 多波束参数校正图(单位:m)
声速资料对多波束数据的准确与否影响很大,因此施放声速剖面仪必须精确测定。投放前,先进行设置,如采样间隔、记录间隔、记录文件名等。声速剖面仪入水时先不往下放,几分钟后待温度传感器稳定了,再慢慢往下放,到达海底后再慢慢往上收。声速剖面信息在内业后处理时需加入测量文件中进行计算。
(3)水深测量及数据处理
多波束测深系统换能器固定在测量船中部侧舷,声呐头入水深度约2 m,其他相关配属仪器设备安装严格按照多波束系统安装要求实施。外业施测过程中按时进行登记,记录测线的上线时间、下线时间、坐标、测线号等信息,遇到系统、船只、水深等发生异常情况,记录好现场情况和处理措施,以备后处理时查阅。
多波束数据处理采用Caris HIPS软件进行处理,多波束水深数据具有精度高、数据量大等特点[8]。Caris HIPS软件的两大特点是海洋测量数据清理系统(HDCS)和数据的可视化模型。HDCS采用科学的数学模型对水深数据进行归算、误差识别与分析,采用半自动数据归算、过滤和分类工具提高人机结合的工作效率,最大限度地消除水深数据中的误差,以得到理想的精度;数据的可视化模型是HIPS的又一大特点,从原始数据进入HIPS软件到形成最终的成果,数据处理的每一步都是在可视化的状态下进行,操作简单直观,流程清晰。数据处理过程如图2所示。
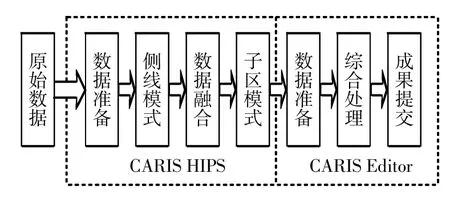
图2 Caris HIPS工作流程图
Caris HIPS软件还可以用三角不规则网或矩形规则网来建立数学模型,在建立好DTM模型的基础上,可以生成三维立体模型、等值线图、剖面图等,也可以进行海洋工程中常用的方量计算,并可通过DTM模型输出文本格式的测点数据(X、Y、Z)。以马迹山港池为例,生成的港池水下立体图如图3所示。

图3 港池内水下立体图
3 测扫声呐测量
侧扫声呐系统由拖鱼、线缆和处理器三部分组成,可对大面积海区的障碍物进行探测。本次侧扫声呐扫海采用EdgeTech4200-FS型侧扫声呐系统,数据速率为6 MByte/s。拖曳系统为TTV-196D双频拖鱼,具有嵌入式DSP芯片、ADSL数据传输接口,分辨率更高,每个通道带宽更宽。EdgeTech4200-FS海底成像系统的基本原理:EdgeTech4200-FS海底成像系统的换能器在航行方向的左、右两侧发射具有一定指向声波,照射到在、右两侧一定宽度范围内的海底表面,当海底表面存在地物时,如礁石、锚、锚链、桩、电缆、沉船等地物,声波触及地物时产生反向散射的声波,反向声波送给换能器接收,信号传输至接收机进行放大及处理,再传输至终端的显示器和记录器反映出一定宽度的海底二维声图像,从声图像检测海底地物的性质、大小、高度、范围。
根据《海道测量规范》要求,结合探测需要,用较高精度的探测量程档100 m档(左右各100 m,扫测趟宽度为200 m),对测量海区进行全覆盖探测。
施测采用拖拽式工作,本次探测是针对具体目标进行,根据目标处的水深情况将拖体的绳长放到水下1 m(水深<5 m)或2 m(水深>5 m)不等,采用侧拖拖体的工作方式,既保证仪器安全,又可保证不丢失目标。
3.1 声图像的解释
SIS-4200-FS海底成像系统的声图资料经过分析,采用计算机绘制成海底地物图,反映地物分布范围和类型。外业探测结束后,内业经拖鱼与GNSS位置偏差和线缆长度等偏差改正,对侧扫影像判读与分析,并根据量取目标及阴影的尺度[9-10],确定可疑目标影像。
声图像的相关特性和各自特征依据是图像形状、色调、大小、阴影和相关体等。形状是指各类图形的外貌轮廓;色调是指衬度和图像深浅的灰度;大小是指各类图像在声图上的几何形状大小;阴影是指声波被遮挡的区域;相关体是指伴随某种图像同时出现的不定形状的图像。
3.2 侧扫声呐图像分析
侧扫声呐图像数据可以获得海底地物的性质、大小、范围。海底测扫声图像可分类为目标图像、地貌图像和水体图像等。
目标图像包括沉船、礁石、电缆、水下障碍物及水下建筑物等图像。地貌图像包括沙带、沙川、断岩、沟槽及各种混合形成的地貌图像。水体图像包括水中散体条纹、温度跃层、尾流块状、水中气泡等图像。
当各种因素提供充分时,判读目标的成功率就会越高。对于本文扫测而言以目标图像的判读为主。
以马迹山港3#锚地为例,该区域为典型的流冲刷形成的海底,海底地势平坦,如图4所示。该区域内西北边缘有一处暗礁区域,如图5所示。

图4 3#锚地底质之声像图
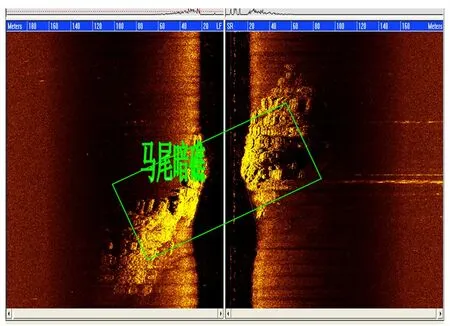
图5 3#锚地障碍物声像图
4 扫海测量的对比分析及综合应用
4.1 多波束测深系统及侧扫声呐系统的对比
多波束测深系统可以进行全覆盖水深测量,优点在于定位精度高、噪声小、能进行三维可视化分析。多波束声呐通常安装在测量船或载体上,由于多波束声呐的测量方式导致声呐图像的分辨率及信噪比较低,且随着水深的增加进一步降低。
侧扫声呐系统采用拖曳模式来贴近海底进行测量,可以呈现丰富的海底纹理。
侧扫声呐系统与多波束测深系统对比,受拖曳测量模式与采用单宽波束发射模式的影响,侧扫声呐的位置不够准确且波束的定位精度较低,进而导致侧扫声呐图像中存在位置精度差、海底形状畸变、波束缺少高程信息、无法准确地反映海底地形起伏变化等不足[11-12],定位精度远低于多波束测深系统。侧扫声呐与多波束相比可以采用远高于多波束声呐的声波频率和采样频率,通过相等时间采样,可以在单次脉冲中获取远多于多波束图像的后向散射强度回波数。因此,侧扫声呐海底图像的分辨率远高于多波束声呐图像。
4.2 多波束测深系统及侧扫声呐系统的结合
多波束测深系统及侧扫声呐系统二者同样可以反映海底地貌特征,测量信息具有较强的互补性,因而融合二者可获取高精度高分辨率的海底地形与地貌图像。
图像结合的方法是利用多波束声呐和侧扫声呐图像的匹配,来实现侧扫声呐图像与多波束测深地形叠加。首先,对多波束声呐图像和侧扫声呐图像依次开展数据归化、分类和形态学处理,获得二者的底质分类图像;然后,通过对两种底质图像部分区域匹配并获得对应的匹配特征点对,进而对侧扫声呐图像进行位置校正;最后,利用具有准确位置的侧扫声呐图像和高精度的多波束测深地形,叠加获得了高位置精度和高图像分辨率的海底地形与地貌图像,实现了对海底地形起伏变化和海底特征准确精细地呈现。
通过对马迹山港中转西航道水域的实测多波束声呐与侧扫声呐数据进行融合,并与地形进行位置叠加,证明了该方法的有效性和正确性。进港内航道多波束匹配后生成对的三维效果图如图6所示。匹配后的侧扫声呐的声像图如图7至图9所示。

图6 进港内航道三维图

图7 进港内航道三维图外马蹄礁石声像图

图8 进港内航道三维图2#礁石声像图

图9 进港内航道三维图3#~6#礁石声像图
多波束测深系统生成的三维图能够准确查询海底地物的三维信息,确定最浅点和精确地位置。侧扫声呐系统声像图能直观反映海底地物的性质、大小和分布范围。
通过对相同区域内两种底质图像进行匹配,获取障碍物的准确深度、范围、位置等属性信息,得出结论如下。
2#礁最浅深约25.5 m;3#礁最浅深约25 m;4#最浅深约25 m;5#礁最浅深约25 m;6#礁最浅深约25 m;外马蹄礁呈右浅左深状(北浅南深),最浅深约23 m。
2#礁顶部呈现约120 m×110 m范围,礁石底部深约50 m;3#礁至6#礁由北向南连成一个大礁盘,3#礁整个礁盘顶部呈现约450 m×80 m范围,礁盘底部深约50 m;4#礁顶部呈现约90 m×70 m范围;5#礁顶部呈现约150 m×80 m范围;6#礁连着5#礁,礁石顶部呈现大约60 m×70 m范围;外马蹄礁顶部呈现大约140 m×80 m范围。
校正后的侧扫声呐图像中特征点位置最大差值从原来的15 m降低到了2 m,显著地提高了侧扫声呐图像的位置精度。
5 结论
针对马迹山港中锚地、航道、浅滩等特殊地形,本文采用多波束测量数据和侧扫声呐相结合进行扫海测量,通过对测量数据、三维图像、声像图等方法进行比较,分析了多波束图像和侧扫声呐图像的特点,得出合理的结论。
利用多波束、侧扫声呐两种不同的设备进行扫海测量,提高了不同方法的可靠性。特别是多波束和侧扫声呐配合在水下目标的探测方面可以进行良好的优势互补,将两者的影像在底质和地理位置上进行叠加,极有力地提高了海底地物地貌解译的准确性,可以很好地对水下目标物实现很好的解译工作,为港口及船舶通行的安全提供了有力保障。
