无人机多光谱遥感反演近海fDOM浓度
2021-03-08刘善伟武钰林许明明
刘善伟,武钰林,许明明,张 杰
(中国石油大学(华东)海洋与空间信息学院,山东 青岛 266580)
海洋荧光溶解有机物是海洋有色溶解有机物中可产生荧光的组分,其理化性质对海洋水色遥感、浮游植物生产力和生态系统结构与功能有重要影响。fDOM荧光可作为陆源污染很好的指示剂,此外,fDOM还对海水中许多污染物质的形态、毒性及运移有重要的影响,可作为沿岸水质、海洋污染程度评价的代表性参数[1]。目前,遥感监测方法已经成功应用于内陆水体的fDOM浓度反演[2],但近海区域水质遥感监测研究的指标多为叶绿素、浊度、悬浮物等[3-4],对fDOM浓度反演研究较少。
近海水质遥感监测中,一般基于卫星遥感反射率或海面实测光谱结合实测水质数据,构建近海、海湾区域的水质参数反演模型[5-6]。然而对于水体遥感而言,传感器所接收到的辐射信号中有90%来自大气的影响,只有不足10%含有水体信息[7]。因此,水质参数遥感反演的精度很大程度上依赖于卫星遥感影像的大气校正精度。此外,卫星遥感受空间分辨率与时间分辨率的限制,难以及时快速地进行水质监测[8],而无人机具有机动、灵活、高效等优点[9],且无人机遥感相比于卫星遥感无需进行大气校正,因此,近年来无人机遥感水质监测研究日益增多[10]。针对小微型湖泊,国内外研究者基于无人机多光谱影像反射率构建的总磷、悬浮物浓度、浊度等反演模型具有较好的精度,模型决定系数可达到0.75,为小微型水域污染防治提供了技术支撑[11-12]。随着无人机高光谱遥感的发展,利用实测光谱反射率与实测水质数据构建反演模型具有较高的精度,应用于无人机高光谱影像反演的水质参数浓度空间分布与现场观测结果趋势一致[13-14]。国内外众多研究者在无人机水质监测方面的研究对象主要为河流、湖泊等内陆小微型水域水体[11-14],对近海海域水质参数的反演大多采用卫星遥感手段,无人机遥感手段应用不够广泛。
本文以青岛灵山湾为研究区,以海面实测光谱及实测水质数据为基础,通过相关性分析选取与fDOM浓度相关性高的波段组合作为特征变量,构建多种fDOM浓度反演模型,选择最佳模型并应用于无人机多光谱影像,实现对fDOM浓度的监测。
1 研究区与数据
1.1 研究区
研究区位于山东省青岛市灵山湾海域(120°05′E—120°10′E,35°50′N—35°55′N),南濒黄海,多条河流汇入湾内,通过地表径流向近海输送淡水及陆源物质,影响近岸海域的水质状况。综合考虑研究区面积和数据获取所需时间,在研究区内设置两行四列共8个采样点,距离海岸线最近的一行与海岸线近乎平行、相距约2 km,行列间距均为2 km。
1.2 实测光谱数据
对8个采样点进行光谱测量获得实测光谱数据,测量时间为2020年7月29日10时至12时,该时间段天气较晴朗,太阳光线强度大。光谱测量采用水面以上测量法,使用TRIOS水面移动测量系统,保持伸缩杆方向与太阳入射平面135°夹角,使3根传感器分别有效测量太阳辐照度、海面辐照度和天空辐照度3种参数,对每个采样点测量15次光谱取均值,通过Mobley(1999)方法处理计算得到离水辐亮度和遥感反射率等。
1.3 多光谱遥感影像数据
海面实测光谱数据获取时,同步采集无人机多光谱数据。使用大疆精灵4无人机搭载的多光谱成像仪,航高设为100 m,空间分辨率约5 cm,包括蓝(450 nm±16 nm)、绿(560 nm±16 nm)、红(650 nm±16 nm)、红边(730 nm±16 nm)、近红外(840 nm±26 nm)5个波段,图1为海面真彩色合成的无人机多光谱影像。

图1 真彩色无人机影像
为了评估反演算法的大范围应用能力,还获取了距离海上实验日期最近的GF-1 WFV4多光谱影像,过境时间为2020年8月1日,幅宽为820 km,空间分辨率为16 m,有蓝光(450~520 nm)、绿光(520~590 nm)、红光(630~690 nm)以及近红外(770~890 nm)4个波段,开展了辐射定标、大气校正、几何校正等预处理工作。
1.4 水质参数数据
现场还同步开展了采样点的水质监测工作,每个采样点利用EXO多参数水质分析仪测量25次并取平均,得到相应点的fDOM浓度值。
2 研究方法
2.1 实测光谱归一化处理
采样点光谱反射率曲线差异较大的原因除了水质参数不同外,还与太阳角度、天气变化等因素有关。光谱归一化可降低天气条件和测量角度对反射率的影响,便于比较不同地点、不同时间的测量结果[15-16],因此对水体反射率进行归一化处理,可使在外界环境变化条件下测量的水体光谱具有可比性。归一化公式如下。

式中,LN(λi)表示i波段归一化后的反射率;λi表示i波段的波长;L(λi)表示i波段反射率的初始值;n表示400~900 nm(3.3 nm间隔)范围内包含的波段数量。
2.2 无人机多光谱辐射定标
相较于卫星遥感手段,无人机飞行高度低,获取的影像范围小,大气折射和地球曲率的影响可以忽略,因此无需进行大气校正,辐射定标后即可得到反射率数据[17-18]。
无人机多光谱影像的反射率为入射光强与反射光强的比值。反射光强可认为是影像的像元亮度值,但入射光强需要通过标准标定板定标获取。主要步骤为:无人机作业起飞前,将已知反射率的标定板置于无人机多光谱镜头下,在作业环境中获取标定板影像,因标定板反射率、标定板影像的反射光强已知,即可得到当前环境的入射光强。得到入射光强后,即可通过入射光强与反射光强比值的方法计算后续无人机获取多光谱影像的反射率。
2.3 实测光谱与水质参数相关性分析
波段组合因子可以突出水质参数的光谱特征,使得非特征波段和特征波段不重合的其他水质参数的交叉影响所造成的误差平均化和随机化[19]。波段组合中的比值因子能够突出水质参数的光谱特征,并有效消除水表面粗糙度和环境噪声的干扰。Pearson相关性分析是从统计学角度出发,研究两个或多个随机变量间关联度强弱的方法。以两个变量为例,相关系数r的取值范围为-1~1,当r值为负时,代表两个变量间呈负相关关系;当r值为正时,代表两个变量间呈正相关关系,相关系数r表达式如下。
式中,yi是第i个采样点水质参数的浓度;xi是第i个采样点的反射率。
采用迭代算法,对归一化后的实测光谱反射率逐一进行比值,与fDOM浓度进行相关性分析,得到Pearson相关系数,选取相关性高的波段反射率比值因子参与建模。
2.4 模型构建与检验
水质遥感反演模型就是建立水质参数浓度与最佳敏感因子的关系,将敏感因子作为自变量,水质参数浓度作为因变量,构建模型用于水质遥感反演[20],常用的模型是基于统计回归分析方法建立的,包括多项式、线性、指数、对数和多元线性回归等。在研究区内,根据采样点的空间分布及数量情况,选取一部分实测点用于模型训练,剩下一部分实测点用于模型验证,技术路线如图2所示。

图2 技术路线图
采用平均相对误差(Mean Relative Error,MRE)评价模型的反演精度,计算公式如下。

式中,yipre和yi分别为第i个采样点的fDOM浓度反演值和实测值;n为采样点数量。
3 实 验
3.1 光谱数据处理及敏感波段选取
对现场实测光谱进行归一化处理,归一化后的水体光谱曲线如图3所示。由于波段比值可以有效减弱其他环境因素的干扰,因此对每个波段归一化后的光谱反射率逐一两两进行比值,并与实测fDOM浓度进行Pearson相关性分析,相关系数分布热力图如图4所示,分析得到相关性高的波段反射率比值因子为R(452.0)/R(560.9)、R(452.0)/R(650.0),相关系数分别为0.858、0.740。

图3 归一化水体光谱曲线
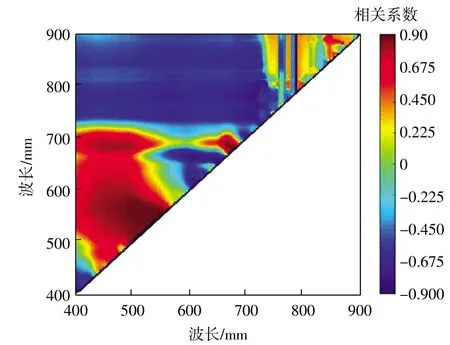
图4 Pearson相关系数分布热力图
3.2 模型构建与检验
本文选取6个实测点作为模型训练点,2个实测点作为模型精度检查点,以实测光谱反射率比值因子为自变量,fDOM浓度为因变量,分别构建一元线性、二次多项式、指数、对数、幂函数、多元线性回归模型,模型参数如表1所示。
采用决定系数R2来判断模型的拟合度,R2的值介于0~1之间,越接近1说明模型拟合度越好。从拟合度看,基于波段比值组合的多元线性回归模型结果最好,决定系数为0.75;其次是R(452.0)/R(560.9)波段比值因子中的二次多项式模型,决定系数为0.73。从平均相对误差看,基于波段比值组合的多元线性回归模型平均相对误差最低,为8.83%,模型精度最高,与拟合度的比较结果一致。对其余2个检查点,计算表1中模型训练精度最高的3种模型(多元线性回归、二次多项式、幂函数)验证集的MRE,结果如表2所示。其中多元线性回归模型验证集MRE最低,为8.76%,二次多项式模型以及幂函数模型验证集MRE分别为8.88%和9.15%,均大于前者。综合考虑,多元线性回归模型为最优模型。

表1 反演模型参数

表2 模型验证MRE
3.3 无人机多光谱影像fDOM浓度反演
将多元线性回归模型用于无人机多光谱数据进行fDOM浓度反演,为了进一步验证模型在该影像上反演的精度,选取与无人机多光谱影像采集时间地点一致的8个采样点进行验证,分析影像反演值与实测值的相关性。通过统计回归方法得到采样点影像反演值与实测值的散点图如图5所示,各点反演值、实测值及相对误差结果如表3所示。

图5 影像采样点反演值与实测值散点图

表3 采样点反演值与实测值相对误差
图中直线为数据分布的偏差线,距离偏差线越近的采样点反演值与实测值越接近,距离偏差线越远则代表差值越大。反演值与实测值拟合的决定系数为0.77,8个点基本都分布在偏差线附近,相对误差最小为3.83%,最大为29.66%,8个点平均相对误差为16.34%,与卫星遥感影像水质反演精度相近[21-23]。
3.4 GF-1多光谱影像fDOM浓度反演
将本文所构建的多元线性回归模型应用于覆盖灵山湾海域的GF-1多光谱遥感影像,反演该海域fDOM浓度的空间分布特征。近岸海域fDOM浓度为4 QSU左右,而远岸海域浓度大部分为2~3 QSU,8个采样点的fDOM浓度影像反演值与实测值的平均相对误差为17.35%,整体呈现出近岸高、远岸低的空间分布特征。沿海一带是人口的聚集区,大量高强度的人类活动、随河流注入灵山湾内的富营养水体,再加上海水涨潮时使得水体交换能力变强,沿岸较浅的水体遭受强烈搅动,均会对近海水质造成一定的影响;而远岸海域水体受人类活动和地表径流的影响较小,海洋环境相对于近岸较稳定,因此fDOM浓度呈现出近岸高于远岸的空间分布特征。
4 结论
本文基于海面实测光谱与实测水质数据,通过相关性分析得到敏感因子,建立线性、指数、对数、多项式、多元线性回归等fDOM浓度反演模型,选择多元线性回归模型反演研究区fDOM浓度,主要结论如下。
(1)海面实测光谱与fDOM浓度具有较强的相关性,波段反射率比值因子R(452.0)/R(560.9)、R(452.0)/R(650.0)的相关系数为0.858、0.740,构建的多元线性回归模型决定系数为0.75,平均相对误差为8.76%。
(2)将海面实测光谱与fDOM浓度构建的多元线性回归模型应用于多光谱影像数据进行fDOM浓度反演,无人机多光谱影像的fDOM浓度反演值与实测值拟合的决定系数为0.77,平均相对误差为16.34%。GF-1多光谱遥感影像反演的fDOM浓度空间分布与海上实测浓度值总体趋势一致。
与卫星影像数据相比,无人机多光谱影像数据具有高空间分辨率、无需大气校正、数据采集实时灵活等优点,在近岸水质反演中具有广阔的应用前景。
