GNSS导航型接收机动态单点定位性能对比测试方法
2021-03-04管庆林樊春明
管庆林,樊春明
GNSS导航型接收机动态单点定位性能对比测试方法
*管庆林1,2,樊春明1,2
(1.闽江学院海洋学院,福建,福州 350108;2. 闽江学院卫星导航与空间信息工程研究院,福建,福州 350108)
为改善接收机自身定位性能,提高市场竞争力,全球导航卫星系统(GNSS)导航型接收机研制过程中需进行大量的定位测试和对比分析。动态情况下,接收机运动轨迹和实际接收的卫星信号质量实时变化,因此,传统的信号模拟器仿真测试方法不足以真实地反映接收机的定位性能。为反映各接收机的实际动态单点定位性能并能进行接收机对比研究,设计了一种动态单点定位性能对比测试方法,以轿车为移动载体在实际信号和真实环境中进行了验证试验。试验结果表明该方法可从观测数据质量和单点定位精度两方面实现三种导航型接收机的动态单点定位测试和定位性能对比。
GNSS(全球卫星导航系统);接收机;动态定位;定位性能
0 引言
2020年7月31日,习近平总书记向世界宣布我国北斗三号全球卫星导航系统(BDS)正式建成开通,并为全球用户提供定位导航授时、全球短报文通信和国际搜救服务,成为继美国全球定位系统(GPS)和俄罗斯格洛纳斯系统(GLONASS)后,向全球提供服务的卫星导航系统。下一步,北斗计划在2035年前建设完成更加泛在、更加融合、更加智能的综合时空体系[1,2]。在新的发展阶段,北斗除了持续更新与完善系统外,将推动产业转型和升级,积极推进“北斗+”融合创新和“+北斗”时空应用发展,真正实现“中国的北斗、世界的北斗、一流的北斗”的目标[3]。
卫星导航系统提供的位置和时间数据是服务人类生产生活的基础数据。当前,基于北斗的导航服务已广泛进入大众消费、共享经济和民生领域[2],低成本高精度终端已被移动智能终端、电子商务、位置服务等厂商采用[4-6]。近年来,我国在与北斗有关的接收机、板卡、芯片、模块、天线等关键技术领域虽已实现自主可控,但国产高精度板卡销量仅占国内30%的市场份额[1,7]。为使国产北斗芯片、板卡、接收机等终端更具市场竞争力,一个重要手段是要努力提升产品性能和品质,降低生产成本。
接收机、板卡等终端研制过程中,需针对定位算法、定位性能等指标进行大量的针对性测试。静态条件下,接收机性能测试与评估可在标准检校场地完成[8-11],静态单点定位(SPP)精度评价方法也已成熟,如文献[12-16]对单点定位性能进行了评估。动态条件下,接收机性能测试主要用信号模拟器进行[9-10],由于动态情况下接收机所处的位置实时变化,采用信号模拟器进行测试不足以真实反映接收机的实际动态性能,加之信号模拟器价格昂贵,因此,接收机的动态性能测试备受人们关注。文献[17]提出了一种高动态下卫星导航接收机性能评估方法,然而并没有涉及车载导航等低动态领域。
为能降低测试成本,反映接收机在实际信号和真实动态环境下的定位性能,实现不同接收机之间的性能对比,以便更好地改善和提升接收机性能,本文设计了一种接收机动态单点定位性能对比测试方法,在车载情况下,利用实际卫星信号对不同品牌导航型接收机进行了动态性能测试及对比,从观测数据质量和单点定位精度方面实现了接收机的对比测试与分析。
1 动态单点定位对比测试设计
静态单点定位精度评定时,因接收机静止于固定位置,可用传统的控制测量手段确定固定点的精确坐标作为单点定位精度评定的参考值。但对动态定位而言,接收机安置在移动体上,实现单点定位精度评定的基本前提是要获得高精度的运动轨迹。考虑到当前全球卫星定位系统实测的单点定位精度平均为5~10 m,实时动态相对定位(RTK)精度可达到厘米级甚至毫米级[1,18],可用厘米级的RTK定位结果作为参考值来评价米级的动态单点定位精度。进一步的,要实现不同导航型接收机之间的性能对比,在保证各接收机所处的环境一致的同时,还要确保各接收机的观测数据信息来源一致。
基于上述情况,设计了图1所示动态单点定位硬件连接图。其中,基站可架设在视野开阔,周边对空通视条件良好,无大功率干扰源的地方,移动端可安置在某一移动载体上,可确保动态测试过程中,各移动端接收机周围环境同步变化。基站和移动站及数传电台可实现RTK定位与计算,获得动态单点定位精度评定所需的高精度参考值。接收机A、B、C通过功分器连接在同一个天线上,可确保各接收机接收的信号源一致。
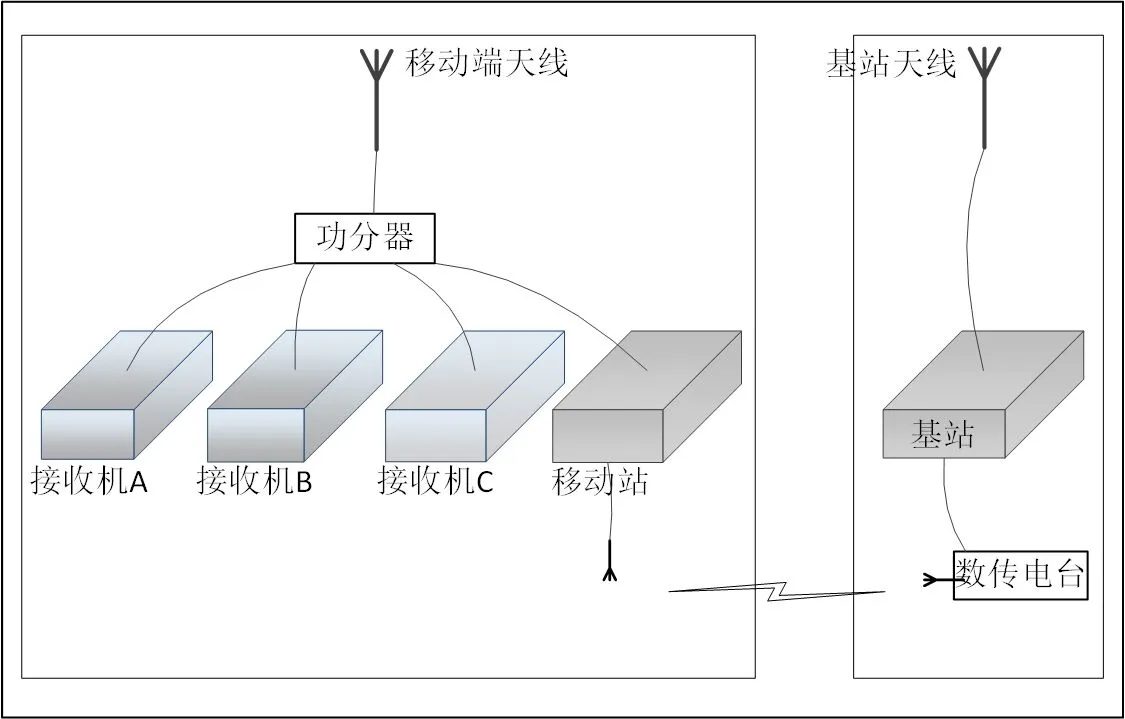
图1 硬件连接示意图
2 动态定位性能评价
文献[9-10]从输入输出、定位精度、动态性能、可靠性等多个方面对导航型设备及单元的性能做了要求并提供了相应的测试方法,文献[11]提出从观测数据完整率、周跳比、多路径误差、伪距噪声、载噪比等方面对观测数据质量进行评估。考虑到接收机研制过程中,研发人员主要关注其观测数据质量和定位性能,而导航型接收机一般为多模单频接收机,其单点定位通常采用伪距观测值进行解算。本文结合文献[9-11] 方法和动态对比测试设计,从卫星跟踪数量、精度因子(DOP)、信噪比(SNR)来评估接收机观测数据质量,从定位精确度和准确度来评估接收机单点定位精度。


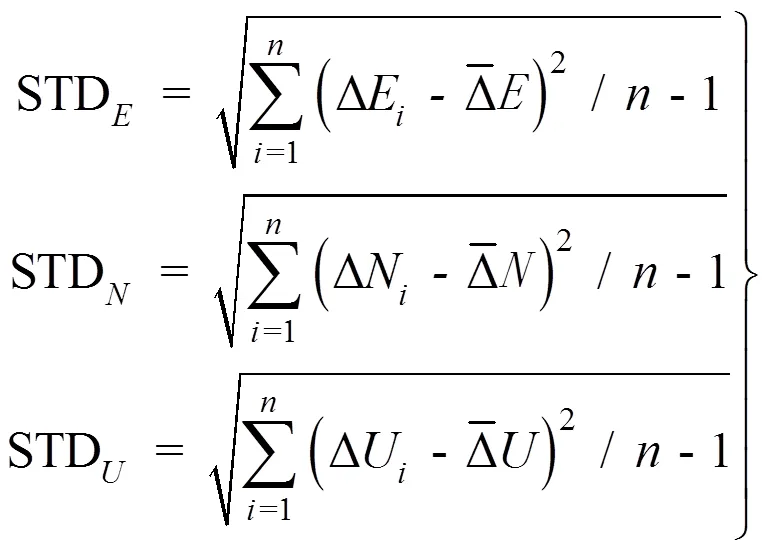
同理,依据站心坐标系东方向(E)、北方向(N)和天顶方向(U)的定位误差来评定精度。具体的,先计算各历元待测接收机单点定位结果和与之对应的移动站接收机RTK固定解,求出它们在E、N、U方向上的差值,有:


3 动态单点定位性能对比
为进行导航型接收机动态单点定位性能对比测试,以小轿车为移动载体,搭载3台不同品牌的导航型接收机在城市道路中进行了动态单点定位测试,从观测数据质量、单点定位精度方面对各导航型接收机进行了对比分析与评价。
3.1 数据采集
在闽江学院广成楼楼顶位置已知(精度为毫米级)处架设基站接收机、天线及电台,将3台导航型接收机按图1所示连接安置在汽车上并连接到同一个天线进行了1小时的动态测试。表1为各接收机的配置和解算模型。其中基站接收机和移动站接收机为多系统双频接收机,导航型接收机为多系统单频接收机。为能客观地对各导航型接收观测数据质量进行评价,A、B、C接收机的采样间隔,卫星系统及卫星信号频率配置一致。为实现A、B、C接收机之间的定位性能比较,单点定位解算采用各导航型接收机自身的SPP算法。
表1 各接收机配置与解算模型
Table 1 Receiver configuration and solution model
接收机接收机配置与解算模型 基站接收机采样间隔:1 s卫星系统:GPS,GLONASS,BDS信号频率:GPS L1 L2,GLONASS L1 L2,BDS B1 B3解算模型:RTK 移动站接收机 导航接收机A采样间隔:1 s卫星系统:GPS,BDS信号频率:GPS L1,BDS B1解算模型:SPP 导航接收机B 导航接收机C
3.2 接收机观测数据质量比较
对A、B、C三台接收机1小时的观测数据进行处理,得到三台接收机实时接收到的可视卫星颗数、PDOP值,如图2所示。图3为三台接收机所接收的全部卫星信噪比与卫星仰角的关系。为确保数据质量对比的公平性,在统计三台导航型接收的机瞬时可视卫星数和PDOP值计算时,将A、B、C三台接收机的卫星高度截止角均设置为10°。表2中,对整个测试时段内接收机接收到的卫星数量按区间进行统计,统计接收机跟踪到的卫星数量在该数量区间持续时间的比例及其整个时段的平均PDOP值。

图2 可视卫星数和PDOP值

图3 信噪比随高度角的变化
表2 各接收机的可视卫星数量与PDOP值
Table 2 Number of visible satellites and PDOP of the receivers
接收机卫星跟踪数量持续时间比例PDOP 0–5颗6–10颗11–15颗16–20颗21-25颗 A0.7%0.1%0.7%95.5%3.0%1.4 B0.4%0.1%16.7%82.8%0%1.6 C2.4%12.3%59.1%26.2%0%2.2
由图2和表2可看出,A和B接收机在80%以上的时段内可接收到15~20颗GPS/BDS卫星,这比C接收机要好得多。从图3中可知,B接收机不输出高度角小于10°的卫星观测数据。综合来看,A接收机的观测数据质量优于B接收机,B接收机的观测数据质量优于C接收机。
3.3 单点定位精度对比
为确保单点定位精度评定的准确性和作为参考值的RTK固定解的可靠性,选取运动轨迹至基准站之间最长基线长度小于10 km的路段进行定位精度评定,如图4所示。移动站接收机通过自身观测数据和通过电台接收到的基站差分数据进行RTK解算,解算结果表明该路段RTK固定解超过90%。

图4 汽车运动轨迹
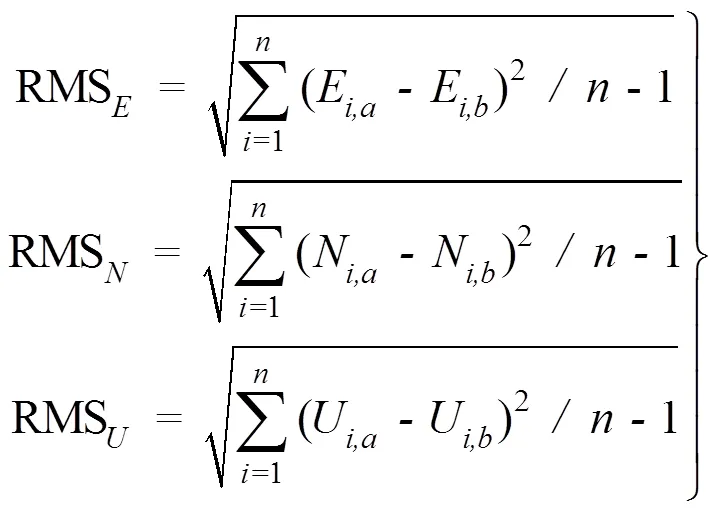
分别将A、B、C三台接收机的瞬时定位结果与对应历元RTK固定解求差,得到三台型接收机的瞬时定位误差,如图5所示。按公式(4),(5)计算各接收机在站心坐标系E、N、U三方方向上的精确度和准确度。表3为A、B、C三台接收机动态单点定位结果精确度和准确度的统计值。
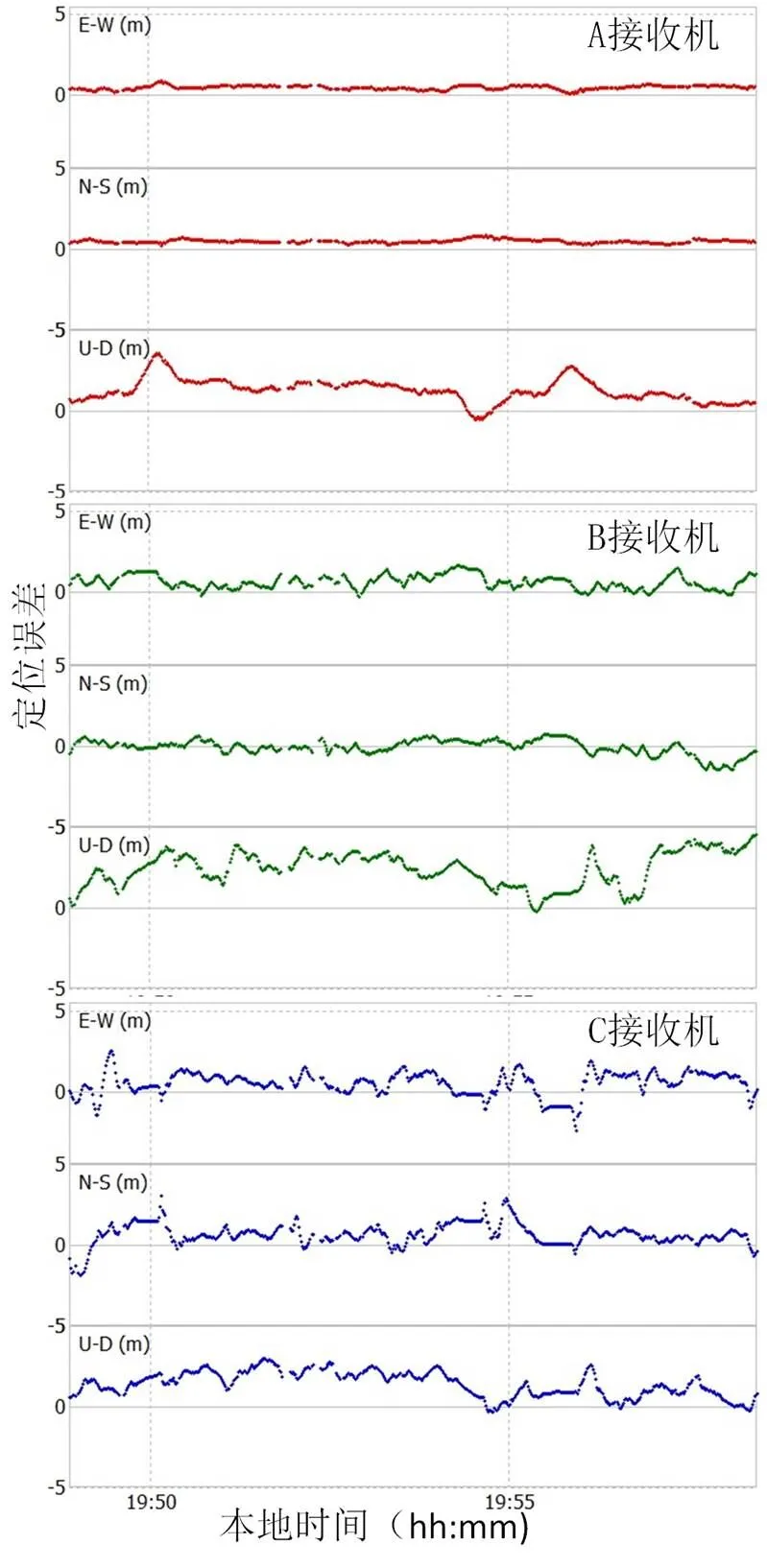
图5 单点定位误差曲线

表3 单点定位精度统计(2)
由图5可看出,A接收机的单点定位误差曲线比B、C接收机的更平滑,而B、C接收机的单点定位误差曲线具有明显的波动特性。此外,A接收机的定位误差波动范围也明显小于B和C接收机。导致这种结果的可能原因是,A接收机的单点定位解算时,用观测精度更高的载波相位观测值对伪距观测值进行了平滑,或者A接收机对单点定位结果进行了滤波处理,以达到提高定位精度的效果。从表3可得:A、B、C三台接收机单点定位水平精度(RMS指标,95%可信度)分别为1.41 m,1.77 m,2.62 m;垂直精度(RMS指标,95%可信度)分别为2.93 m,5.31 m,3.23 m;三维精度(RMS指标,95%的可信度)分别为3.25 m,5.60 m,4.16 m。
综合A、B、C三台接收机的观测数据单点定位结果,可得出,A接收机的定位性能优于B和C接收机。B接收机的观测数据质量虽比C接收机好,在单点定位解算效果方面,B接收机的水平定位精度优于C接收机,但垂直精度比C接收机差。因此,可初步认为:B接收机在接收机硬件方面比C接收机有优势,而C接收机在单点定位解算效果方面比B接收机有优势。
4 结论
本研究结合GNSS接收机、板卡等终端开发过程中对导航设备动态性能测试评估的需要,设计了一种在真实动态环境和实际卫星信号下的动态单点定位对比测试方法,以汽车为移动载体进行了对比测试实验。测试结果表明:①该测试方法测试可在真实的动态环境中实施,可不依赖昂贵的GNSS信号模拟器,对导航型接收机的研制具有积极意义;②该测试方法可以从接收机观测数据质量和单点定位精度两个方面对接收机进行性能评价。
GNSS接收机可同时输出伪距观测数据和载波相位观测数据,接收机的数据质量评估除文中所用的卫星跟踪数量、信噪比指标外,还包括观测数据完整率、多路径误差、伪距噪声、载波相位噪声、周跳比等多个指标,在后续的研究工作中,将结合上述指标对观测数据质量进行评价,使接收机观测数据质量评价更全面。除精度指标外,导航型接收机的性能还包括首次定位时间,重捕获时间、灵敏度等指标,这些指标可用信号模拟器进行测试,本研究设计的车载动态单点定位对比测试方法不具有通用性,但可作为测试实例进行参考。
[1] 冉承其. 北斗卫星导航系统建设与发展[J].卫星应用. 2019(7):8-11.
[2] 中国卫星导航系统管理办公室. 北斗卫星导航系统发展报告(4.0版)[R]. 北京:中国卫星导航管理办公室, 2019.
[3] 李冬航. “北斗+”融合创新与“+北斗”时空运用[J]. 卫星应用, 2020(7):32-36.
[4] Montenbruck O, Swatschina P, Markgraf M, et al. Precision spacecraft navigation using a low-cost GPS receiver[J]. GPS Solutions, 2012, 16(4):519–529.
[5] Bellone T, Dabove P, Manzino A M, et al. Real-time monitoring for fast deformations using GNSS low-cost receivers[J]. Geomatics Natural Hazards and Risk, 2016, 7(2):458-470.
[6] Tsakiri M, Sioulis A, Piniotis G. The use of low-cost, single-frequency GNSS receivers in mapping surveys[J]. Survey Review, 2018, 50(358):46-56.
[7] 中国卫星导航系统管理办公室. 北斗卫星导航系统发展报告(3.0版)[R]. 北京: 中国卫星导航管理办公室, 2018.
[8] JJF 1118-2004, 全球定位系统(GPS)接收机(测地型和导航型)校准规范[S].
[9] BD 420005-2015, 北斗/全球卫星导航系统(GNSS)导航单元性能要求及测试方法[S].
[10] BD 420010-2015, 北斗/全球卫星导航系统(GNSS)导航设备通用规范[S].
[11] BD 420022-2019, 北斗/全球卫星导航系统(GNSS)测量型接收机观测数据质量评估方法[S].
[12] Angrisano A, Gaglione S, Gioia C. Performance assessment of GPS/GLONASS single point positioning in an urban environment[J]. Acta Geodaetica et Geophysica Hungarica, 2013, 48(2): 149-161.
[13] Cai C, Gao Y, Pan L, et al. An analysis on combined GPS/COMPASS data quality and its effect on single point positioning accuracy under different observing conditions[J]. Advances in Space Research, 2014, 54(5):818-829.
[14] 唐卫明,徐坤,金蕾, 等. 北斗/GPS组合微距单点定位性能测试和分析[J]. 武汉大学学报:信息科学版, 2015,40(4):529-533.
[15] Pan L, Cai C, Santerre R, et al. Performance evaluation of single-frequency point positioning with GPS, GLONASS, BeiDou and Galileo[J]. Survey Review, 2016, 49(354):197-205.
[16] 严超, 余学祥, 徐炜, 等. GPS/BDS/GLONASS组合微距单点定位性能测试与分析[J]. 全球定位系统, 2017, 42(2):25-31.
[17] 綦祥,朱雯雯,王宇轩. 一种高动态卫星导航接收机性能评估方法[P].中国专利: CN 106842241 A, 2017-06-13.
[18] Yang Y X, Li J L, Wang A B, et al. Preliminary assessment of the navigation and positioning performance of Beidou regional navigation satellite system[J]. Science China Earth Sciences, 2014, 57(1):144-152.
A KINEMATIC SINGLE POINT POSITIONING PERFORMANCE COMPARISON TEST METHOD FOR GNSS NAVIGATION RECEIVERS
*GUAN Qing-lin1,2, FAN Chun-ming1,2
(1.Ocean College of Minjiang University, Fuzhou, Fujian 350108, China;2. Institute of Satellite Navigation and Spatial Information Engineering, Minjiang University, Fuzhou, Fujian 350108, China)
During the development of global navigation satellite system (GNSS) receiver, a large number of tests and comparative analyses need to be carried out to improve the receiver performance and enhance market competiveness. Under kinematic conditions, the motion trajectory of the receiver and the actual
satellite signal quality change in teal time, therefore, the traditional signal simulator simulation test is not sufficient to truly reflect the kinematic positioning performance. In order to reflect the actual positioning performance of each receiver, a kinematic single point positioning performance comparison test method was designed, The verification test was carried out in real signal and real environment with car as the mobile carrier. The results showed that the method could realize the positioning test angle performance in terms of observation data quality and positioning accuracy.
global navigation satellite system (GNSS); receiver; kinematic positioning; positioning performance
TP392
A
10.3969/j.issn.1674-8085.2021.01.011
1674-8085(2021)01-0061-06
2020-09-18;
2020-11-03
福建省科技引导性(重点)项目(2016H0028);闽江学院人才引进项目(MJY20018)
*管庆林(1986-),男,云南宣威人,实验师,硕士,主要从事卫星定位算法方面的研究(E-mail:449122768@qq.com);
樊春明(1961-),男,上海人,教授,博士,主要从事卫星定位导航、物联网、无线电通信等方面的研究(E-mail:chunming@126.com).
