灾后救援机器人的设计研究
2021-03-02李佳学于春洋张释鉴董延华
李 爽,李佳学,于春洋,张释鉴,董延华
(吉林师范大学 计算机学院,吉林 四平 136000)
近几年全球频发的地震火灾等灾难给人民群众生命带来了严重威胁,搜救困在废墟中的幸存者成为受灾之后最棘手的事情.然而灾后恶劣的环境和复杂的空间阻碍了救援人员进入现场进行施救,操作不当导致的二次事故的发生,会使救援人员的生命安全受到严重威胁[1].灾后救援机器人是以地震救灾为背景而设计研发的,具有在复杂的灾后环境中顺利穿行的能力、定位被困人员的准确位置和状态、实现被困人员和远程救援人员的对话.因此使用救援机器人辅助救援成为解决这一难题的有效手段[2].
1 救援机器人系统设计
灾后救援机器人是在人工智能背景下融合了电、光、机、无线通信等技术的产物,它由远程监控系统和机器人主体两大部分组成,主要执行寻找幸存者、侦察任务、勘探化学品泄漏以及对受灾人员进行紧急的救助等任务,可以代替人探测生命迹象、定位幸存者位置、实施救援的智能设备.
当机器人进入废墟搜索幸存者时,首先通过加装的云台摄像头探路,通过摄像头采集的现场图像来控制机器人在废墟中快速穿行,如果遇到空气中灰尘较多图像模糊时通过人体红外感应模块探测生命迹象,并随时监控废墟的温度等空气质量的变化,为救援人员进入现场前做好保障措施.一旦确定幸存者的具体位置,会向远端操控台发出信号,并开启对讲设备,实现远程救援人员对幸存者进行心理安抚和详细了解幸存者的状况,协助有自救能力的幸存者进行逃离.同时,使用GPS导航系统规划出一条安全的营救线路[3].
2 救援机器人硬件系统
机器人要完成复杂的救援任务,需要其具有工作稳定和设计合理的智能控制系统对运动控制系统、通信系统、传感器系统和视觉系统进行调配[4],以保障救援机器人具有较强的道路适应能力、稳定的数据采集能力和高速的信息传输能力[5],图1为救援机器人主体模型.
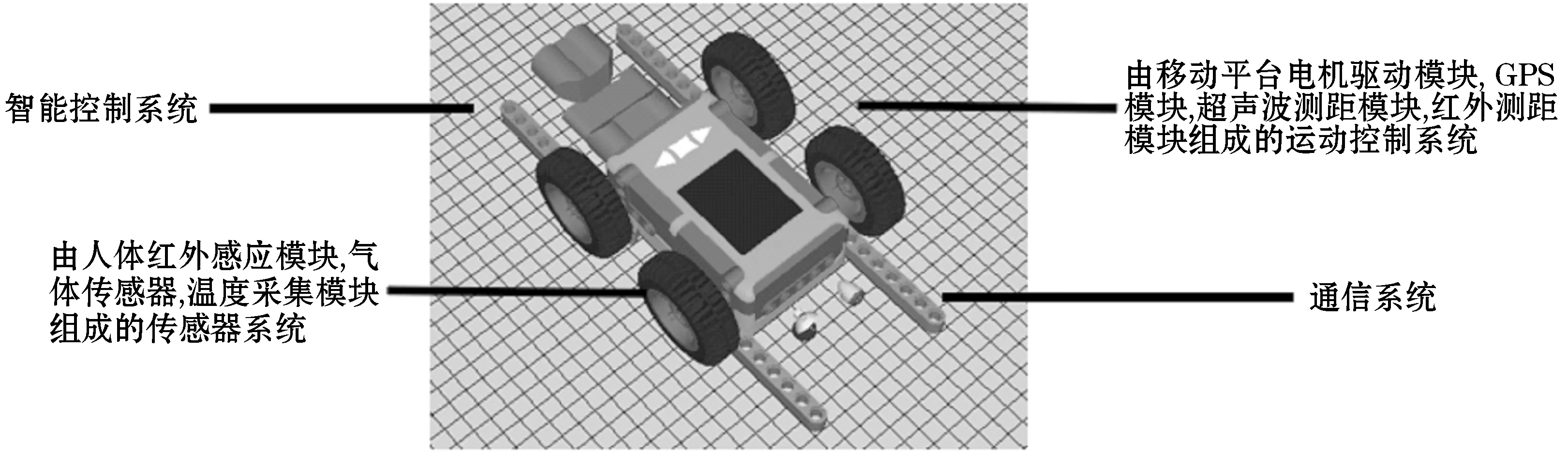
图1 救援机器人主体模型Figure 1 Main model of rescue robot
2.1 智能控制系统
智能控制系统作为整个机器人的指挥中心,它相当于机器人的大脑来控制其他单元执行相应指令.控制系统是以计算机控制技术为核心的集成动态系统,因此控制系统的智能程度决定了救援机器人的稳定性、响应速度和控制精度.
救援机器人采用通过计算机和运动控制器控制电机转动的体系结构,即基于PC机的开放式结构控制系统方案,控制系统由上位机(控制端计算机)和下位机(车载PC机)两部分组成,这两部分之间通过无线通讯数据模块传递信息.上位机负责实时显示机器人主体采集到的现场声音、图像、人体信号、有害气体成分和障碍物报警等信息,同时向下位机发出操控命令,指挥机器人下一步执行动作;下位机负责收集机器人传感器系统所采集到的信息,并将收集到的信息回传给远程遥控台,为下一步执行方案提供依据.同时,下位机的运动控制系统会严格执行上位机的指令要求对机器人进行操控,如运行速度和各关节姿态等[6],灾后搜救机器人系统结构如图2所示.

图2 灾后搜救机器人系统结构图Figure 2 Structure diagram of the post-disaster search and rescue robot system
2.2 机械本体结构和运动控制系统
灾后复杂的路面环境要求机器人在直线滑行、转弯滑行和越过障碍物时对地形有较强的适应能力和稳定性,而且要有足够的前进速度和持续工作的能力.为了使机器人能够顺利通过崎岖的、含有不规则障碍物的道路,机器人机械本体结构采用四足轮腿混合式结构,即其腿部采用轮腿分离的结构,可以根据路面状况选择两种不同的行走方式.由后方两个驱动轮以及前方两个万向轮组成轮子驱动部分,在障碍物较少的地方快速前行,而腿部则是为了越障攀爬,整个结构为搜救机器人提供动力.
运动控制系统是机器人在废墟中穿行的有效保障.电机驱动模块、GPS定位模块、超声波测距模块和红外线测距模块构成了机器人的运动控制系统[7].GPS的功能是实时定位,轨迹跟踪,使用GPS便于跟踪搜救机器人轨迹及准确定位出受灾者位置.超声波测距模块用于测距避障,红外线测距则是为了弥补超声波在近距离测距时出现的测量盲区,用来辅助超声波测距来更加精准测距的,两者协作配合,从而为搜救机器人规划路径提供准确的依据,使其更好地进行搜索任务.
2.3 传感器系统
完善的传感器系统是救援机器人感知周围环境的有效途径.人体红外感应模块、气体传感器、温度采集模块构成了机器人的传感器系统,主要负责物体识别、测距、测温、路径规划和避障等.当灾后现场存在因中毒或受伤而陷入昏迷无法呼救的伤员,机器人可以通过人体红外感应模块检测人体发出的红外线检出,避免搜救遗漏[8].为防救援现场存在有毒或易燃易爆炸气体,对救灾人员产生潜在的生命安全威胁,在救灾人员进入现场之前先要测量空气中的有害气体成分,而温度采集模块能感测到范围为-55~+125℃的温度,用于勘察现场的温度情况[9].这些信息的掌握既有助于寻到受灾人员又可排除其他潜在的危险.
2.4 通讯系统
操作人员能够远程操控机器人执行任务,不允许出现机器人失控的情况,这就需要机器人具有实时可靠的无线视频信号传输能力.通信系统是搜救机器人主机与远程监控站信息交流的通道,主要负责本位机器端与远程操作控制端的双向通讯[10].一方面,将现场采集的图像视频信息,温度环境信息等各种数据信息以及机器自身的状态信息发送给远程监控站,以便远程操作人员能够及时且细致的了解现场和机器本体的情况,并能够迅速做出有效的决策,争取更有利的形势.另一方面,远程操控人员通过控制站将控制信号发送给机器端,来帮助机器人更好的完成搜索救援工作.因此,通信系统的速度和稳定程度影响着救援机器人系统的性能.
传输给上位机的视频图像信号和传感器信号采用不同的传输途径.由于机器人要实时回传车载摄像头所采集到的现场视频图像,信息量较大,为避免传输过程中因数据量过大而导致的传输延迟和丢包现象[11],使用无线路由器搭建无线局域网,车载云台摄像头使用自带的WiFi模块接入网络,并直接将视频图像传输给上位机进行显示,不经过下位机的处理和传输,避免相互干扰,确保了传感器信息的顺利回传和控制信号的顺利下达[12].
3 救援机器人的软件设计
根据救援机器人的功能需求,机器人的软件设计流程采用模块化的多任务处理机制,通过编写程序实现对机器人各模块的处理,这样不仅有效提高控制系统的工作效率,而且便于程序的修改和调试.
程序设计模块主要包括主程序、图像信息采集单元、超声波测距单元、人体红外探测单元等.图像信息采集程序控制高清云台摄像头采集现场画面并发送数据和接收指令;超声波和红外线测距程序控制传感器完成避障和越障功能,人体红外探测程序实现昏迷伤员的及时发现和报警.软件主程序流程图如图3所示.
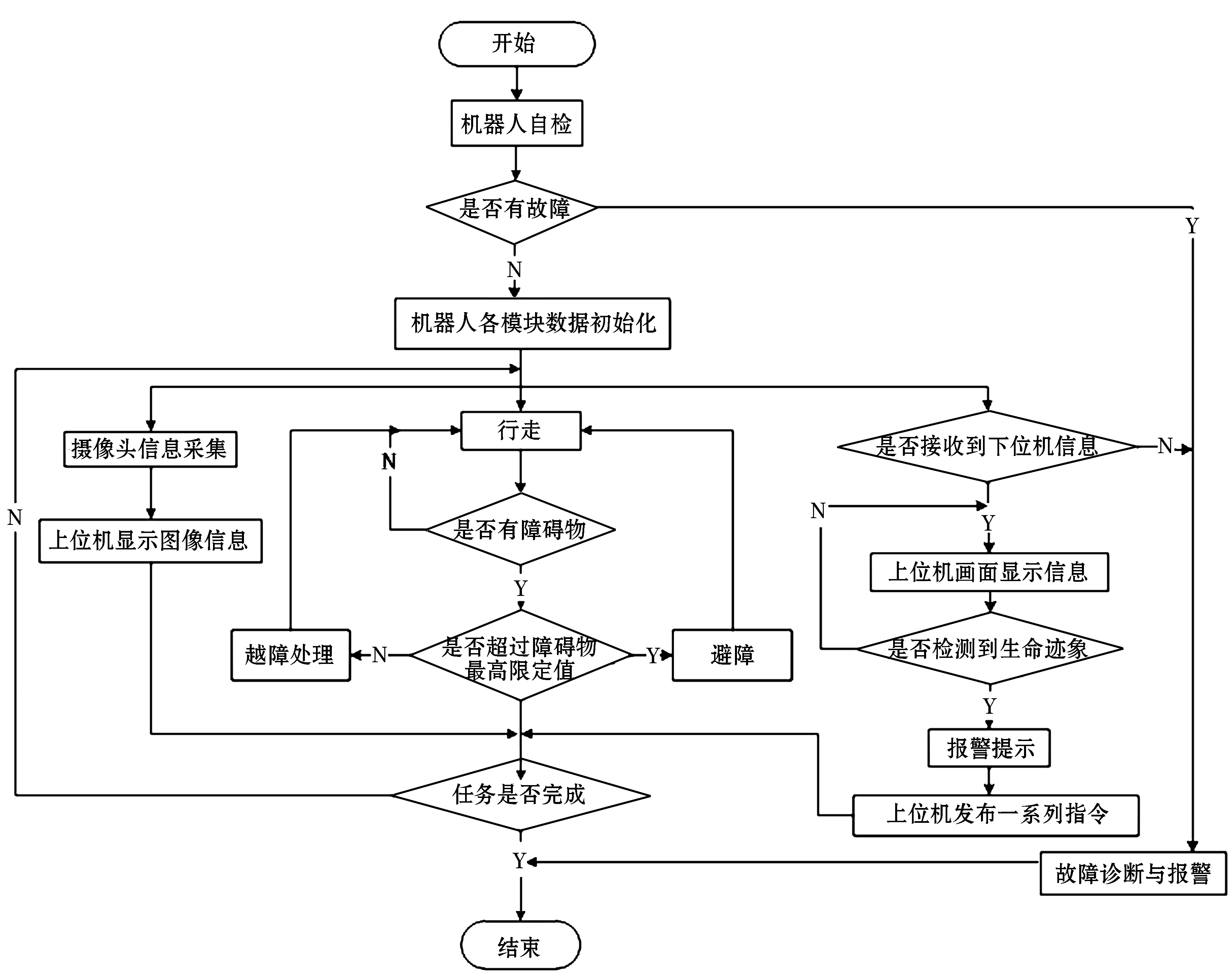
图3 主程序流程图Figure 3 Main program flow chart
4 测试与分析
在机器人视觉系统中采用基于Open CV机器视觉库和时效皆优的Adaboost人脸检测算法实现人脸检测,确定视频流中有无人脸及人脸的位置、姿态等[13].使用机器人脸检测对光照条件、背景模式以及一定程度的姿势变化有较好的鲁棒性[14-15].可以弥补操作人员因长时间观察导致的疲劳工作.
为了检测机器人发现幸存者的性能,在实验室中对灯光、背景等进行布置模拟灾后现场,10名同学模拟被困者分别以不同的位置和姿态呈现,表1记录了机器人对10名同学进行识别的准确率和识别总时长.
从表1的测试结果可以得知,灾后救援机器人检测平均时间为 866.133 ms,在进行测试实验时,由于受到人物面部表情特征、头部旋转角度和不同光线强度及距离机器人摄像头距离等因素的影响,测试的结果存在一定的波动性,整体的平均识别识别率可以满足要求.
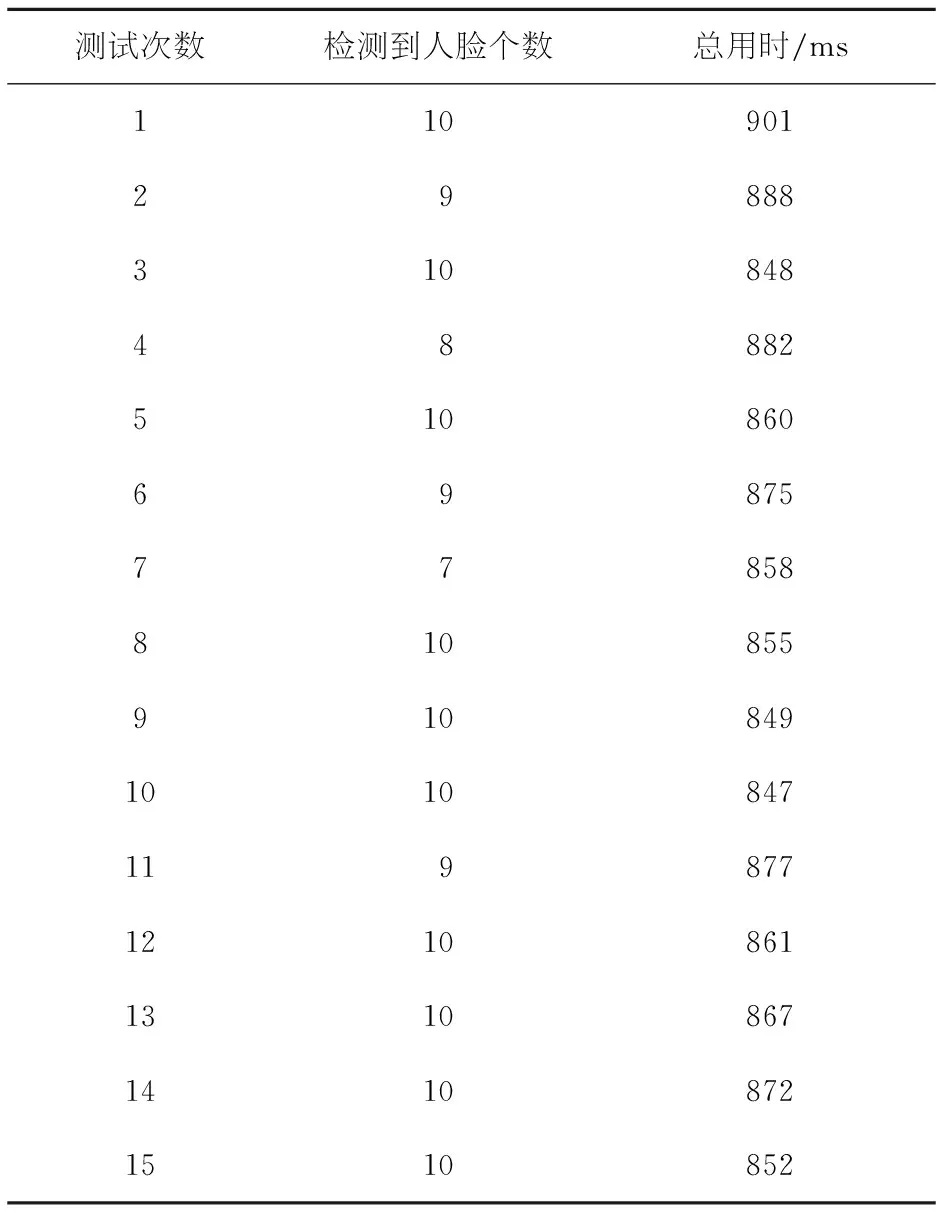
表1 人脸检测统计表
5 结 语
灾后搜救机器人具有穿越障碍物、寻找生还者、本体准确定位、监控周围环境、实时传送现场信息给远程操控台为救援活动提供有效信息的能力,搜救机器人的研制及应用可以辅助救援人员开展灾后搜救工作,在危险环境中发挥自身优势,在保证救援人员安全的前提开展救援活动,在灾后救援工作中起到十分重要的作用.
