柔性机械臂非线性干扰观测器的高阶滑模控制
2021-03-01史欣怡
周 晟,李 解,高 琳,史欣怡
(武警士官学校基层后勤管理系,杭州 310000)
0 引言
目前,机器人技术不断更新,为有效提高机器人工作效率,降低机器人工作时的能量损耗,将柔性连杆材料运用于机械臂的研制中[1]。对比于传统的刚性材料所制成的机器人,柔性材料及柔性结构具有低能耗、高负载、高响应、便于电机直接操作、等多项优点。对系统所构成的n个连杆所构成的机械臂系统,在重复考虑其柔性因素的条件下,通过设定2n个广义坐标完成对系统动态特性的研究,由此可知,柔性机械臂是一个刚柔耦合条件下的非线性系统,系统阶次变高对控制系统的设计产生极大的挑战。
在实际情况中,由于环境、资金、传感器安装等多种因素干扰,存在部分状态量难以获得,因此,为完成对柔性机械臂的操控任务,实现对机械臂的精准控制,将状态观测器引入系统[2]。文献[3]将具有主从结构的观测器引入系统,提高系统的工作准确性并且在一定情况具有控制器性能,完善整个系统的工作能力。文献[4]运用滑模控制方法降低柔性机械臂高非线性、高耦合和时变参量系统的控制难度,将滑模控制理论运用到相应控制模型中,提高整体控制的精准度。
在过去多数滑模控制系统的构造及观测中,其研究都基于一个限制条件,即设定系统的所有状态量为可观测状态,本文为提高控制精度降低对获取观测量的成本及传感器数目,将非线性观测器引入系统,考虑建模和测量的不确定性,负载变化及非线性摩擦阻尼干扰等多线影响,运用高阶滑模的控制方法,对系统进行准确测控,提高控的制整体准确性、稳定性。
1 模型建立
应用假设模态法(一种广义坐标近似法,采用有限个假设模态振动的线性和来近似描述弹性体振动)建立平面多连杆柔性机械臂动力学模型[5]。如图1所示。
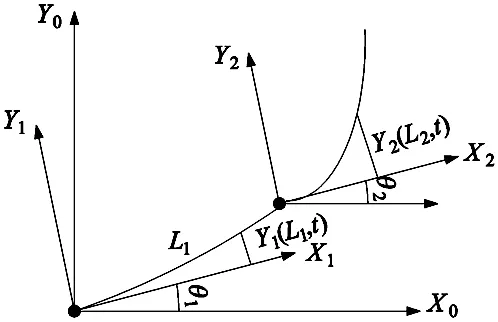
图1 柔性机械臂连杆示意图
柔性臂杆i的弹性挠曲度表达式如下:
(1)
其中,yi(xi,t)代表连杆i的弹性扰曲度,φij(xi)代表连杆i的第j个模态函数,Δij(xi)代表连杆i的第j个模态的广义弹性坐标(i=1,2,…n,j=1,2,…m)。

(2)
Δi(t)=[δi1,δi2,δi3…δim]
(3)
考虑连杆边界条件:
yi(0,t)=0yi′(0,t) = 0
(4)
平面多连杆柔性机械臂系统动力学方程表述构建[6]:

(5)

(6)
式中阻尼矩阵中的元素:
(7)
将式(6)代入式(5)可得:

(8)
(9)
式中,d∈R2×1,设为参数不确定性及外部干扰数值综合,
(10)
(11)
假设2:双连杆柔性机械臂系统所受外部干扰及一阶导数有界。

(12)
正常数w,r分别为外部干扰和一阶导数的上界。
将式(8)变形可得:
(13)

定义状态变量如下:
(14)
得到平面多连杆柔性机械臂的状态空间:

(15)
(16)
(17)
2 非线性状态观测器设计
定义如下变量:
ζ1=Δ,ζ2=Δ
(18)
将公式(5)改写为如下形式:
(19)
定义状态变量xn如下:
(20)
式(20)中,状态变量ζ1及ζ2为不可测参数,选取非线性观测器进行数值估计[7-8]。
引入非线性观测器将柔性机械臂动力学方程改写为如下形式:

(21)
(22)
定义非线性观测器观测误差ζe如下:

(23)
式(23)中:
式中,矩阵Aζ为Hurwtiz矩阵,矩阵Bζ的模非常小。
3 控制器设计
由相应等式(5)可知,柔性机械臂系统自身耦合度高、非线性强的多输入多输成系统。文中依据图2所示,采用非线性干扰观测器同时运用高阶滑膜控制,降低系统整体振动情况,二者配合情况下降低干扰的影响,使得系统具有较强的鲁棒性[9-11]。
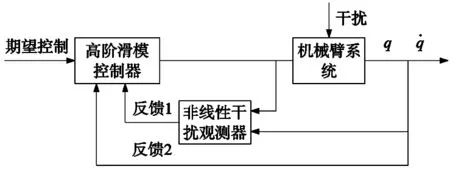
图2 控制系统框图
定义相应滑模面如下:
σ=x1-x1d
(24)
对式(24)滑模面求解二阶导数得:
(25)
为降低系统抖振提高机械臂运行准确性,对式(24)进行二阶求导得:
(26)


(27)




(28)
(29)
式中,w(t)∈R2×1,是待设计函数,其一般形式为:

(30)
(31)
式中,j=2,3,α4=1,α3=α,α为介于0~1之间待设计的参数。
在实际系统中,外部干扰不可避免,因此需要设计补偿器对外界干扰进行相应补偿,增强系统的鲁棒性。对式(28)设计如下积分滑模面:
(32)

wd(t)=-βs-γsign(s)
(33)
式中,β=diag(b,b)为正定对角矩阵,

(34)
控制器作用下,有限时间内系统稳定。
求导得:
将式子代入得:



式中,ϑ>0,可知所示系统将在有限时间内稳定,实现控制作用。
4 数值仿真
设定柔性机械臂连杆基本参数:
m1=1 kg,m1=1.2 kg,L1=0.2 m,L2=0.3 m,
E1I1=10 N·m·rad-1,E1I1=5 N·m·rad-1,
J1=0.25 kg·m2,J2=0.025 kg·m2
所设计控制器给定参数如下:
λ1=diag(5.5,5.5),
λ2=diag(2.5,2.5),α=0.7,k1=0.5,
k2=1.5,k3=2,β=diag(0.5,0.5),
λ=diag(0.05,0.05)
设定系统初始信号:x=(θ10,θ20)
设定系统期望信号:y=(15sin5t,10cos5t)
根据上述基本参数可得:
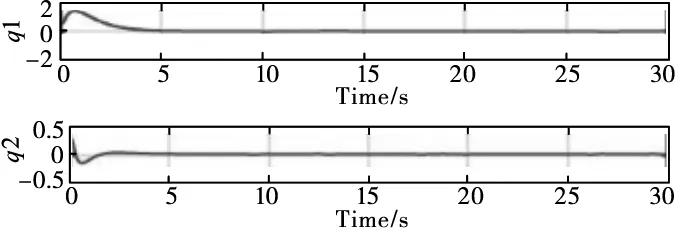
图3 假设模态信号

图4 控制器输出
由图4可知,初始时刻0 s~6 s时间段内,在干扰因素影响下,振动幅度较大,机械臂运动准确性、稳定性不高。在初始时刻6 s之后,控制器输出趋于平缓,机械臂运动趋于一致。采用非线性干扰观测器同时运用高阶滑膜控制,有效的削弱系统抖振,并且对外部干扰存在一定抑制,利于高精度工业生产,具有一定实际意义。
5 结论
本文构建多连杆柔性机械臂系统动力学模型,在控制系统中构建非线性干扰观测器,充分探究基于参数不确定性与外部负载干扰等因素产生的控制影响,基于高阶滑模控制器设计,赋予整个系统较优的抗干扰能力,展现对柔性机械臂的精准控制作业。分析系统的案例仿真验证了本次设计方法的准确性,对后续机械臂的控制研究奠定基础。
