VMD复合熵值法在齿轮故障诊断中的应用*
2021-03-01周小龙张耀娟马风雷
周小龙,张耀娟,王 尧,陈 思,马风雷
(1.北华大学机械工程学院,吉林 吉林 132021; 2.长春汽车工业高等专科学校汽车工程学院,长春 130013;3.长春工业大学机电工程学院,长春 130012)
0 引言
齿轮是旋转机械设备中的重要零部件,其健康状态将直接影响设备的运行状态和生产效益。在齿轮的实际工况中,其工作环境十分恶劣,早期故障所产生的故障特征比较微弱,易淹没在强背景噪声中[1]。因此,对于齿轮故障特征提取及诊断方法的研究具有十分重要的意义。
当齿轮发生故障时,其振动信号往往表现出强耦合性、非线性和非平稳性的特点[2]。近年来,经验模态分解[3](Empirical mode decomposition,EMD)方法由于具有自适应性和较高的时频分辨能力,被广泛应用于齿轮振动信号的分析。但由于自身算法的限制,EMD在分解信号过程中易产生模态混叠问题,这将严重影响分析结果的准确性,并限制了故障诊断精度的提高[4]。目前解决模态混叠问题最为常用的方法是由Wu Z等[5]所提出的集合经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)方法。但实际计算中,受限于白噪声添加次数,EEMD分解中所添加的噪声难以完全消除,这在一定程度上影响了模态混叠问题的处理效果与信号特征提取的准确性[6]。针对上述问题,Dragomiretskiy K等[7]提出一种非递归式自适应信号处理方法——变分模态分解(Variational Mode Decomposition,VMD)。VMD以求解变分问题最优解的形式筛选IMF分量,因此,可有效避免分解过程中模态混叠问题的产生。
齿轮在故障状态下的振动信号同正常情况相比,携带了很多微弱故障信息。熵可有效反映事件中所包含的信息,在机械故障诊断中应用广泛。由于缺少相关定量指标,仅利用单一熵值对机械故障进行诊断的效果并不理想[8]。因此,有必要对齿轮故障信号进行多尺度、多特征熵值分析。
基于上述分析,本文提出一种基于VMD复合熵值法和最小二乘支持向量机(Least Squares Support Vector Machine,LS-SVM)相结合的齿轮故障诊断方法。并通过对实测齿轮振动信号的分析,验证了所提方法的实用性和有效性。
1 VMD原理
VMD方法可根据预设尺度参数K将信号分解成K个中心频率为ωk的模态函数uk。则可得到变分约束问题:
(1)
式中,∂t为对函数求时间t的偏导数;δ(t)为单位脉冲函数。
引入增广拉格朗日函数ζ,将约束问题转化为非约束问题:
(2)
式中,α为二次惩罚因子,保证在高斯噪声存在情况下信号的重构精度;< >表示向量内积。
(3)
(4)


(5)
2 基于VMD复合熵值法的齿轮振动信号故障特征提取
2.1 齿轮振动信号采集
本文试验设备采用PQZZ-II机械故障模拟综合试验台,该试验台主要由驱动电机、联轴器、齿轮轴、定轴齿轮箱和磁粉扭力器等组成。
试验过程中,采用试验台提供的齿轮标准故障组合套件,其中断齿故障和点蚀故障发生在大齿轮(齿数为75),磨损故障发生在小齿轮(齿数为55),各齿轮均为标准直齿轮,模数为2 mm。电动机转频为50 Hz,数据采集系统包括ADA16-8/2(LPCI)型采集卡、加速度传感器型号为KD1001L型,并安装在输出轴轴承座Y方向上。
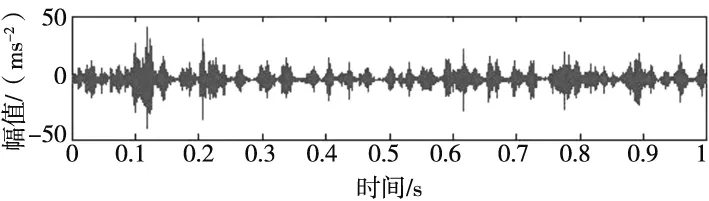
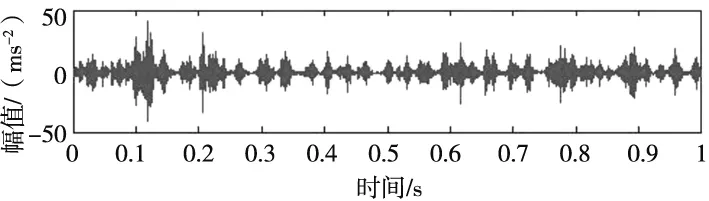
信号采集时,采样频率fs= 5120 Hz,采样时长10 s,分析时长1 s。输入轴平均转速为1470 r/min。使用数据采集系统对正常、点蚀故障、断齿故障和磨损故障4种状态下的振动信号进行采集,4种状态下各采集40组振动信号用于后续分析。图1为不同状态下所测得的一组齿轮振动信号。
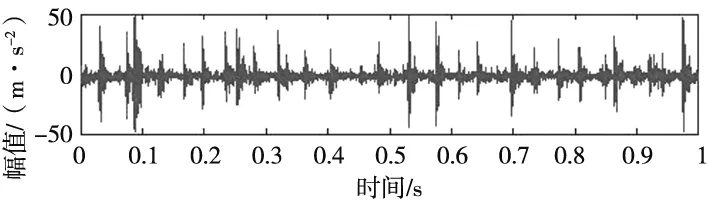
(a) 正常状态振动信号

(b) 点蚀故障振动信号

(c) 断齿故障振动信号

(d) 磨损故障振动信号图1 不同状态下齿轮振动信号
由图1可知,由于信号采集系统中并未有消噪装置,导致采集到的信号中含有较多噪声成分,若以此信号作为后续故障诊断的源信号,这将影响故障识别的准确性,同时增加故障检测难度。
2.2 VMD关键参数的确定
为有效滤除环境噪声等干扰成分对故障诊断准确性的影响,对采集到的齿轮振动信号进行VMD分解。
对VMD方法而言,预设尺度数K是影响该方法分解精度的重要参数。若K取值过小,将会出现欠分解现象;反之,则极易产生过分解现象。
目前,对于VMD参数的选择一般采用默认值法,这在一定程度上限制了该方法的性能。由VMD算法可知,信号经VMD分解所获得的各IMF分量的中心频率以由低频到高频的形式分布,若取得最优预设尺度数K,则最后1阶IMF分量的中心频率应首次取得最大值[10]。因此,本文以各IMF分量中心频率首次取得最大值确定预设尺度数K最佳值。
选用图1c断齿故障信号进行VMD分解,不同K值下各IMF分量中心频率如表1所示。由表1可知,当K= 4时,IMF4分量的中心频率取得最大值,当K>4时,IMF分量中心频率最大值几乎不变,且最大、最小中心频率值都趋于稳定。因此,可认定K= 4为预设尺度的最佳值。
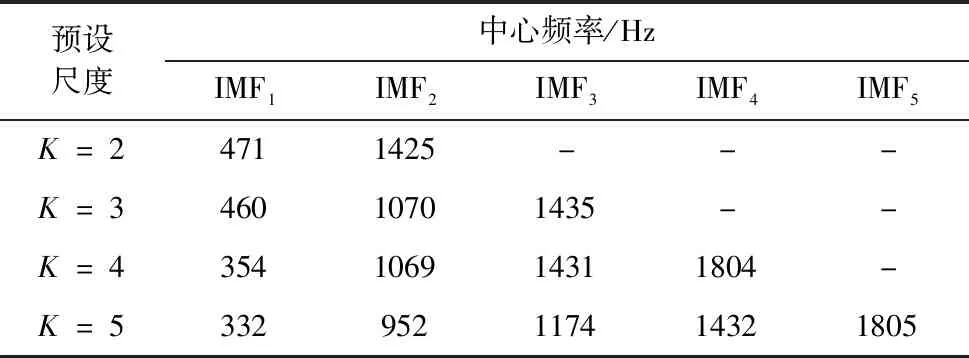
表1 不同K值对应的各IMF分量中心频率
罚参数α的选取决定了VMD分解得到的各IMF分量的带宽,通过对大量齿轮振动信号VMD分解结果的测试分析并结合文献[7],本文选取惩罚参数α=2000。
基于上述分析,采用VMD方法对断齿故障信号进行分解。分解得到的各模态分量及其频谱如图2所示。由图2可知,VMD分解所得各IMF分量集中在各自中心频率附近,有效抑制了模态混叠问题,减少了各模态分量间的信息泄露,从而可有效提高使用熵值作为故障特征的准确性。

图2 断齿信号VMD分解结果及其频谱
2.3 齿轮振动信号提纯
时域互相关系数求解法[9]是常用的VMD虚假模态函数剔除方法,但信号的噪声成分会影响时域相关系数求解的准确性。在频域内,噪声及迭代误差等成分的功率谱密度峰值明显低于表征信号特征成分的模态分量,因此,以各IMF分量同原信号间的频域互相关系数对VMD分解所得虚假IMF分量进行判别[10]。
设Gx、Gy分别为信号xi和yi功率谱,fa为分析频率,则频域内信号xi和yi的互相关系数可表示为:
(6)
式中,∣ρf∣越大,表明两信号在频域上相关性越好;反之,∣ρf∣越小,说明两信号在频域上相关性越差。
计算断齿故障信号经VMD分解后所得各IMF分量的频域互相关系数ρf结果如表2所示。

表2 断齿故障各IMF分量的频域互相关系数
由表2可知,IMF1~ IMF3为表征信号自身特征的主模态分量,而IMF4为虚假干扰。取前3阶IMF分量组成重构信号。按上述方法,对图1中不同状态下齿轮振动信号进行分析,所得重构信号如图3所示。
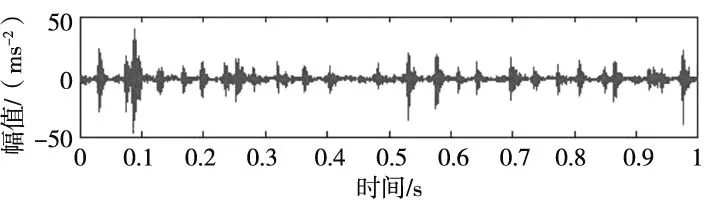
(a) 重构后齿轮正常状态振动信号
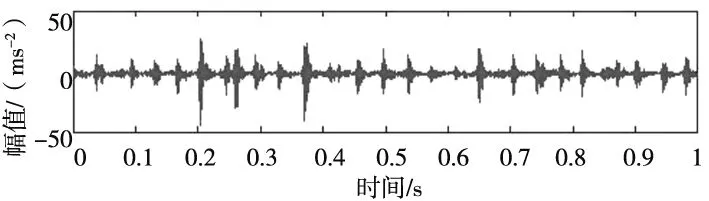
(b) 重构后齿轮点蚀故障振动信号
(c) 重构后齿轮断齿故障振动信号
(d) 重构后齿轮磨损故障振动信号图3 不同状态下齿轮重构振动信号
对比图1和图3可知,本文所提方法有效提纯了齿轮振动信号,滤除了大部分无用的噪声干扰信号成分,突显了信号自身信息,为后续信号特征提取的准确性提供了保证。
3 齿轮故障的特征提取
样本熵具有抗干扰能力强、估计值稳定性好等特点,可有效度量信号的复杂性;奇异值熵在机械信号信息刻画能力、信息成分分析等方面具有其独特优势;功率谱熵是表征信号复杂程度的非线性特征量,同时可表征信号的振动谱型在频域的分布情况;而当齿轮出现故障时,故障信号频带内的能量会出现较大差别,能量熵可有效刻画齿轮振动信号的能量随频率分布变化情况。
采用VMD算法对4种类型齿轮振动信号的各40组数据进行分解,根据基于频域互相关系数准则的虚假IMF判别算法滤除信号中的环境噪声和虚假干扰,并计算出各重构信号的样本熵值、奇异值熵值、功率谱熵值和能量熵值,由此组成40×4的样本数据集。限于篇幅,在此仅在表3中列出不同工况下部分样本数据经VMD消噪处理后计算所得的特征向量。

表3 部分样本的特征向量
分析表3可以发现,表中所求熵值特征向量从时域、频域和时-频域等不同尺度有效地刻划了齿轮信号在不同状态况下的状态特征。
4 基于LS-SVM的齿轮故障诊断
4.1 LS-SVM概述
在工程实际应用中,机械故障诊断所面临的多为小样本情况,SMV分类器在该种情况下具有良好的分类能力。因此,该方法被广泛应用于机械故障诊断领域[11]。
在齿轮故障样本较少的情况下,本文选择LS-SVM作为故障分类算法。相较于传统SVM算法,该方法将优化指标平方处理,从而使不等式约束变为等式约束,由此将二次规划问题转变为线性方程组求解问题,由一个分类器解决了多分类器问题,有效提高了算法的收敛精度和计算速度。
LS-SVM可有效解决二分类问题,对于多状态分类问题的解决思路为将此类问题转化为二分类问题。为此,采用“层分类”法解决多分类问题。该方法具有分解速度快、分解精度适中等优点。
4.2 基于LS-SVM的齿轮故障诊断方法
基于VMD复合熵值法和LS-SVM的齿轮故障诊断方法的具体步骤如下:
步骤1:在齿轮故障模拟综合试验台上获取4种不同状态下的试验数据;
步骤2:对每种状态下的齿轮振动信号进行VMD分解,得到若干阶IMF分量;
步骤3:采用基于频域互相关系数准则的虚假IMF判别算法获取表征信号自身特征的主模态分量,将主模态分量重构的信号作为后续故障识别数据源;
步骤4:分别计算重构信号的样本熵、奇异值熵、功率谱熵和能量熵,提取故障特征;
步骤 5:构建高维状态特征向量:
T=[Es,H,Hf,HEN]
(7)
步骤 6 :采用LS-SVM组成的多故障分类器对齿轮所处状态进行识别。将采集到的齿轮振动信号按照步骤2 ~ 步骤5求出相应的特征向量T,并将其作为LS-SVM的输入,以分类器输出结果确定齿轮的工况和故障类型。
4.3 试验结果与讨论
随机抽取4种类型齿轮振动信号计算出的20组特征向量作为训练样本,用以训练LS-SVM分类器,剩余20组特征向量作为测试样本,以检验齿轮状态识别效果。
将80组特征向量作为输入量,输入LS-SVM分类器进行训练。分别采用线性核函数、多项式核函数及高斯径向基核函数对齿轮的工作状态进行分类,其中,多项式核函数参数d=3,高斯径向基核函数参数γ=1,误差惩罚因子C=100,识别结果如表4所示。
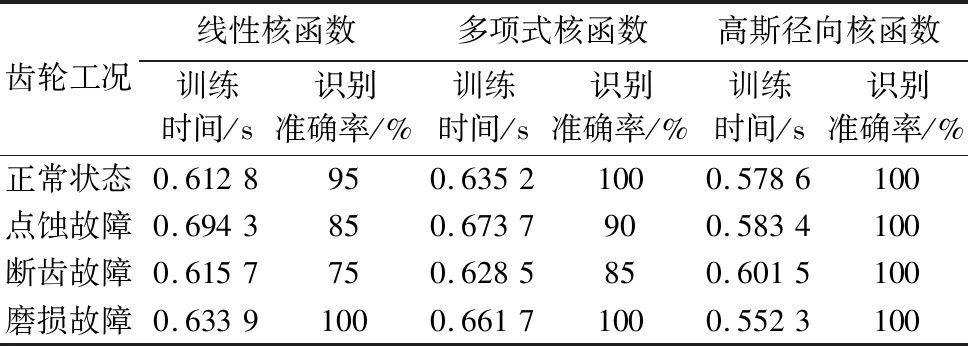
表4 基于VMD复合熵值法的齿轮振动信号LS-SVM识别结果
由表4可知,3种核函数的训练时间差别不大,但基于高斯径向基核函数的LS-SVM分类结果明显优于其他两种核函数。同时,4种状态下齿轮测试样本共80组特征向量用基于高斯径向基核函数的LS-SVM训练的总体识别准确率为100%,可见,在小样本情况下,本文所提方法也可有效对齿轮故障进行诊断和识别。
5 结论
齿轮发生故障时,其振动信号是非线性非平稳信号,利用单一尺度和特征无法全面有效地对齿轮故障特征进行提取。VMD是一自适应、非递归式信号分解方法,利用其将齿轮振动信号分解为多个IMF分量,并根据频域互相关系数准则可有效获取表征信号自身特征的主模态分量进行信号重构。计算重构信号的排列熵、奇异值熵、功率谱熵和能量熵构造齿轮状态特征向量并融合LS-SVM方法,可有效对齿轮的工作状态和故障类型进行识别。通过实例分析,证明了所提方法的实用性和可行性。
