如何提升ROV浅水作业能力
2021-03-01邱可张殷朝深圳海油工程水下技术有限公司广东深圳518067
邱可,张殷朝(深圳海油工程水下技术有限公司,广东 深圳 518067)
0 引言
浅水铺管作业在海油工程领域属于比较成熟的作业类型,国内的浅水铺管作业船一般同时搭载潜水员和ROV,潜水员和ROV负责完成水下施工作业部分,协助布设海管起始锚和起始封头、铺设过程监控、临时解钩弃管和挂钩起管以及布设终止封头等作业。潜水员完成法兰对接、水下焊接等精细操作,ROV完成常规检测和监控作业等。在实际作业中,ROV的作业能力直接影响项目的施工效率和完成质量。ROV的作业能力主要受ROV作业半径、能见度、定位信号、系统高温以及操作人员综合素质等因素影响。
1 增大ROV浅水作业半径
铠装脐带缆ROV作业半径是指以ROV入水点为圆心,作业点距离入水点的直线距离。带有脐带缆管理系统(tether management system,TMS)的ROV,脐带缆的长度一般为400~1 500 m,ROV作业半径是指以TMS为圆心,作业点距离TMS的直线距离。因此深水作业带有TMS时,ROV的作业半径基本等同于脐带缆的长度。而浅水作业中,由于水太浅,TMS和ROV不能形成合适的高度差,脐带缆会因为在TMS出缆口长期摩擦而损坏。同时浅水中伴随有渔网、礁石等障碍物,软缆可能会被缠绕或摩擦损坏。因而,浅水作业中通常采用铠装脐带缆直连ROV的配置方式,可以避免脐带缆受损,但由于铠装脐带缆的自身重量以及拖拽在海底面形成的摩擦力,会大幅度消耗ROV向前的有效推力,其结果会导致ROV的飞行距离即作业半径会减小[1]。
在某铺管项目中,作业水深为6~40 m,海管的着泥点距离ROV入水点为180~340 m 之间,当采用Free-Swimming(铠装脐带缆直连ROV)的方式操作时,由于铠装脐带缆自身的重力、摩擦力以及海流等因素,ROV的飞行直线距离只有180 m 左右,当超出180 m 之后,即使是全功率输出,ROV将不能正常飞行,无法进行相关作业。针对这一难题,制定了在铠装脐带缆外表面加装可拆卸式浮力块,用于抵消铠装脐带缆自身的重力和摩擦力的影响。通过仿真模拟,计算出单块浮力块的上浮力、浮力块数量、安装位置、安装间距等。现场释放ROV操作步骤如下:第一步,ROV在船舷外从A吊解锁;第二步,通过收放系统将铠装脐带缆移至靠近船舷0.5 m 处;第三步,按照预先设计间隔距离安装浮力块。现场回收ROV操作过程与释放过程相反。在项目实践中,利用这种在铠装脐带缆表层安装浮力块的方式,可以很大程度上增大ROV的作业半径,可以有效完成距离船尾340 m 左右的着泥点监控作业。铠装脐带缆加装浮球示意图如图1所示。
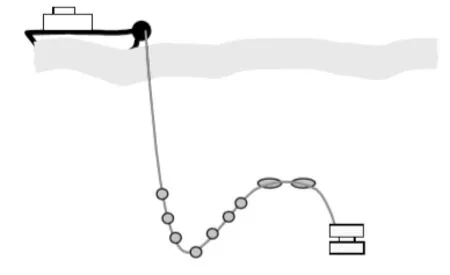
图1 铠装脐带缆加装浮球示意图
2 减少能见度的影响
水下能见度是影响ROV作业能力的最重要指标之一。浅水海域中,受潮汐和洋流的影响,水下经常是呈现泥沙混合悬浮状态,当ROV推进器动作时,极易搅动泥沙,造成浑浊。国内渤海和东海浅水区能见度大多时候是在0.5 m 左右,极大地影响ROV的飞行操作。在这种能见度条件下,ROV搭载普通的避障声纳、普清摄像头以及卤素灯是不足以完成水下作业任务。通过实践证明,ROV搭载二维成像声纳、高清摄像头以及LED灯(如图2所示),在同等自然能见度条件下能明显增加可视化程度,进而提高作业效率和减少安全风险。在实际浅水铺管作业中,在进行着泥点监控时,需要判断海管是否全部着泥,但在着泥点处海管与海底面接触时会产生大量的沙尘和泥土,这使摄像头不能够得到清晰的图像,可以通过二维成像声纳扫描出的图像来判断是否完全着泥(如图3所示)。

图2 高清摄像头成像效果
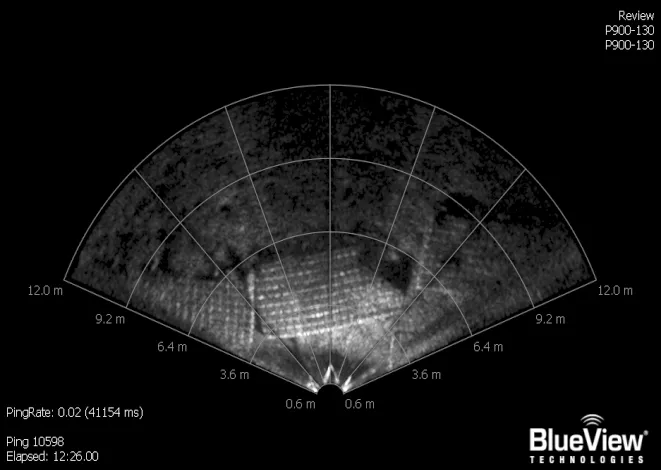
图3 二维成像声纳监控海管过水泥压块
3 增强定位信号
ROV作业时,需要搭载定位信标,用于引导ROV水下飞行路径和提供方位显示。在浅水铺管作业中,大多采用的是超短基线(ultra short baseline,USBL)定位技术,由于水太浅,同时受定位探头安装深度和角度的影响,当ROV距离探头较远后,信标和探头不能实时通信,导致定位信号闪跳或丢失,影响ROV操作安全和作业效率。如果制作成高度和方位可调节的定位探头收放杆,可以根据探头距离ROV的远近进行相应的高度和角度调节,以增强定位信标和定位探头的实时信息互通能力,提升定位精度,保证ROV作业安全以及海管铺设的精度。另外,一般作业只搭载Transponder信标,距离较远时可以搭载Responder信标,可以有效增强定位信号稳定性。
4 减少温度对设备的影响
ROV正常运转过程中动力系统会持续发热。在深水环境中,水温较低,在海水流动过程中,可以带走ROV自身发出的热量,因此在深水环境中不用考虑散热问题。但在浅水环境下,海水温度较高,加上ROV运转过程所产生的热量,单纯的通过海水流动散热可能会造成ROV系统高温报警甚至故障。为了解决这一问题,采取以下措施:第一,将所有的push-lock的补偿管全部换成压制液压管,主要是预防因为高温造成push-lock管膨胀后脱落,继而发生系统漏油、主系统失压现象;第二,电子舱内部加装散热装置,用于加速光端机散热,减小系统高温宕机的风险;第三,适时调小ROV输出功率,减小负载,降低发热速率;第四,ROV完成一项作业任务后,需要在水下待机时,不能使ROV坐在海底(相当于水平推进器没有动作),这样不利于系统油循环冷却散热,因此可以通过手动操作方式,使推进器动作,保持ROV处于悬浮状态,有利于系统液压油循环冷却散热。通过以上措施,整个项目期间未发生因高温导致的ROV设备故障。
5 提升操作人员综合能力
ROV浅水作业的操作风险看似比深水作业风险要小,实则未然。浅水作业时,铠装脐带缆有很长一段需要拖拽在海底面,其最大的风险就是缠绕风险。浅水作业水域一般是靠近海岸线,常年会有渔网、礁石等障碍物,能见度条件较差时极易发生缠绕风险,这就要求ROV操作人员必须具有较高的综合能力,避免发生缠绕。若发生缠绕时,操作人员思维要清晰、操作要谨慎,及时解除险情。因此作为ROV操作人员,要认识到浅水作业的风险隐患,针对不同的作业环境和作业任务制定针对性的预防措施,减少风险发生的可能性。
6 结语
近几年的项目实践中,ROV在海油工程领域发挥了重要的作用,尤其在深水工程中,常规的空气潜水和饱和潜水无法满足深水作业要求,而ROV具有千米级的水深作业能力,因此ROV就成为了深水作业的标准配置。但目前浅水作业中的应用还未普及,但如果ROV的浅水作业能力提升了,以后的运用也会越来越多,文章主要分析了如何提升ROV浅水作业能力,对ROV操作人员具有一定的借鉴意义,也为ROV在浅水海油工程的运用提供参考。
