基于观测器的非定常机翼LPV模型振动控制
2021-03-01胡志贤
胡志贤,杨 慧
(上海工程技术大学 航空运输学院,上海 201620)
0 引 言
气动弹性系统中包括结构力、惯性力和空气动力学产生的非线性相互作用,这可能导致振动和其它不稳定现象[1-2]。当机翼发生振动时,会影响飞行安全,甚至导致毁灭性的事故。为了避免机翼振动对结构造成损坏,并确保飞行安全,人们已经研究了诸多被动控制方法。如,采用质量平衡和局部刚度增强等措施,这将导致飞机重量增加并降低飞行性能。而主动控制,能够适应意外的结构和环境变化,极大地改善了飞行器的性能指标,克服了被动控制技术的缺点,因此成为当下研究的热点[3-4]。
利用控制面的偏转实现振动抑制,是目前常见的主动控制技术方法。文献[5-7]中将单尾缘控制的二元机翼的参数变化状态空间,转化为张量积模型,有效地实现了非线性气动弹性系统的控制。文献[8]提出了积分反演滑模控制方法,较好地克服滑模控制抖振的缺点。然而上述大多数文献研究中,气动力载荷是基于准定常气动理论的,这会给气动弹性模型带来不精确的弊端,并且只适用于低频的飞行条件[9]。
非定常气动理论克服了上述缺点,不少学者将其应用于机翼气动弹性系统[10-15]。然而,为获得模型的时域表达式,会引入不可测的空气动力状态[16],难以用传感器去测量所有状态,这为全状态反馈方法的现实应用带来困难;并且机翼布置过多传感器,增加了传感器失灵引起故障的概率。张量积模型变换方法的主要优点是,将各种模型表示形式,生成基于高阶奇异值分解(HOSVD)的凸多面体的TP模型表示形式[17-18],从而可以很好地应用于现代控制设计工具中,有效地解决非线性系统问题。
基于上述原因,本文的贡献在于使用张量积模型变换的LMI 控制设计方法,设计控制器和观测器,用于稳定和跟踪具有结构立方非线性的非定常气动弹性系统。首先依据拉格朗日方程和Theodorsen 理论建立了带后缘控制面的非定常气动机翼模型的状态空间方程;基于TPtool 工具箱,开发了观测器的设计程序,应用张量积模型变换的控制设计方法,得到整个系统的控制器和观测器;通过仿真验证该方法的有效性。
1 气动弹性模型
1.1 气动弹性系统建模
带有控制面的二元机翼力学模型如图1 所示。该模型的3 个自由度为:沉浮位移h(向下为正)、俯仰角α(迎风抬头为正)、以及控制面偏转角β(向下偏转为正)。弹性轴在翼弦中点前时,a- <0。表1 给出了本文相关机翼结构参数的符号表示。
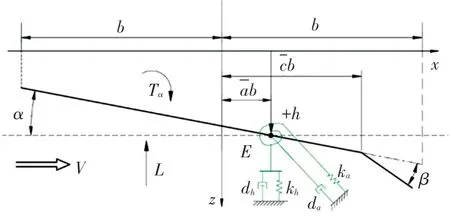
图1 机翼的力学模型Fig.1 Mechanical model of wings
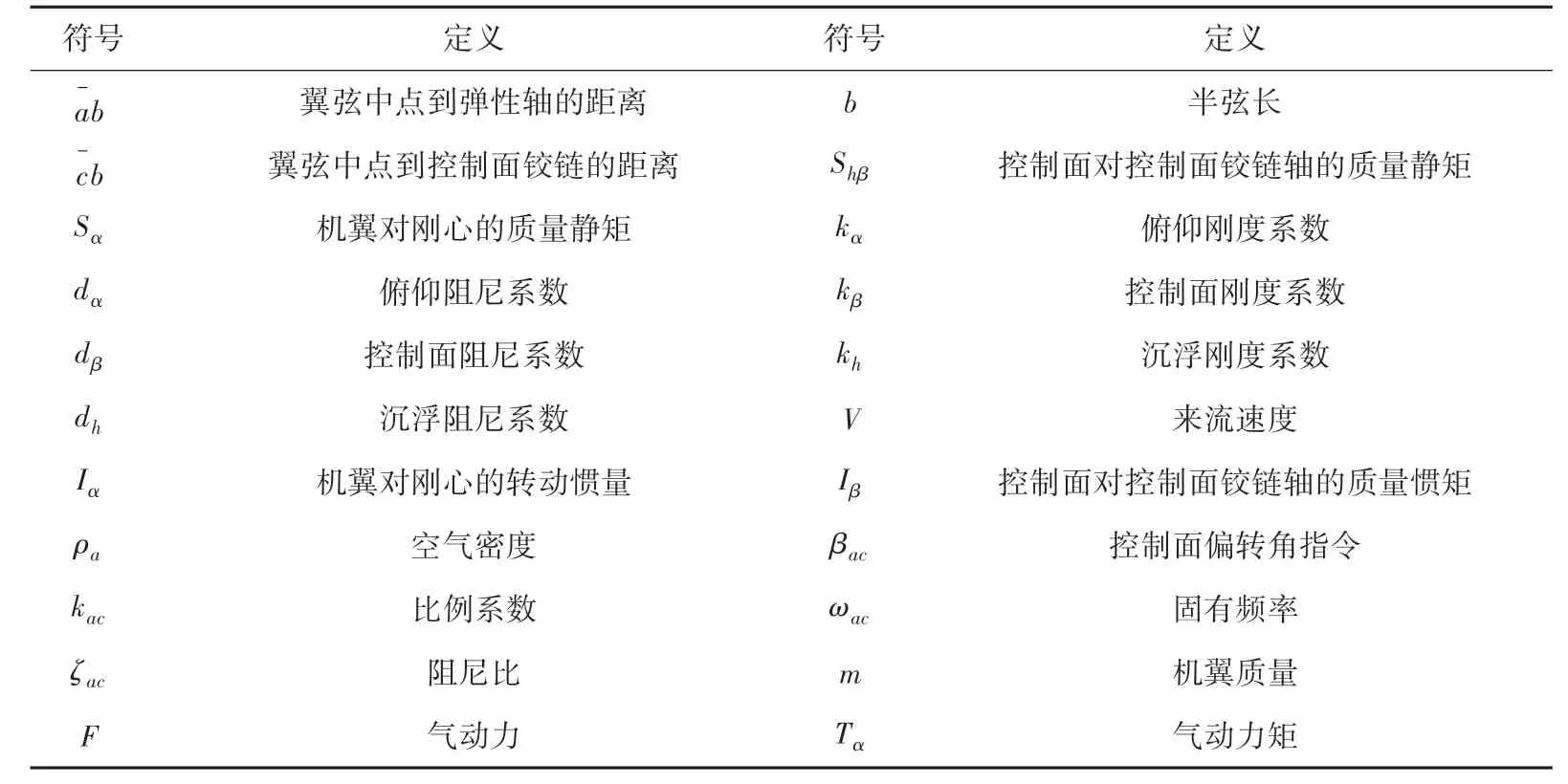
表1 机翼结构参数的符号表示Tab.1 Symbolic of wings structureparameters
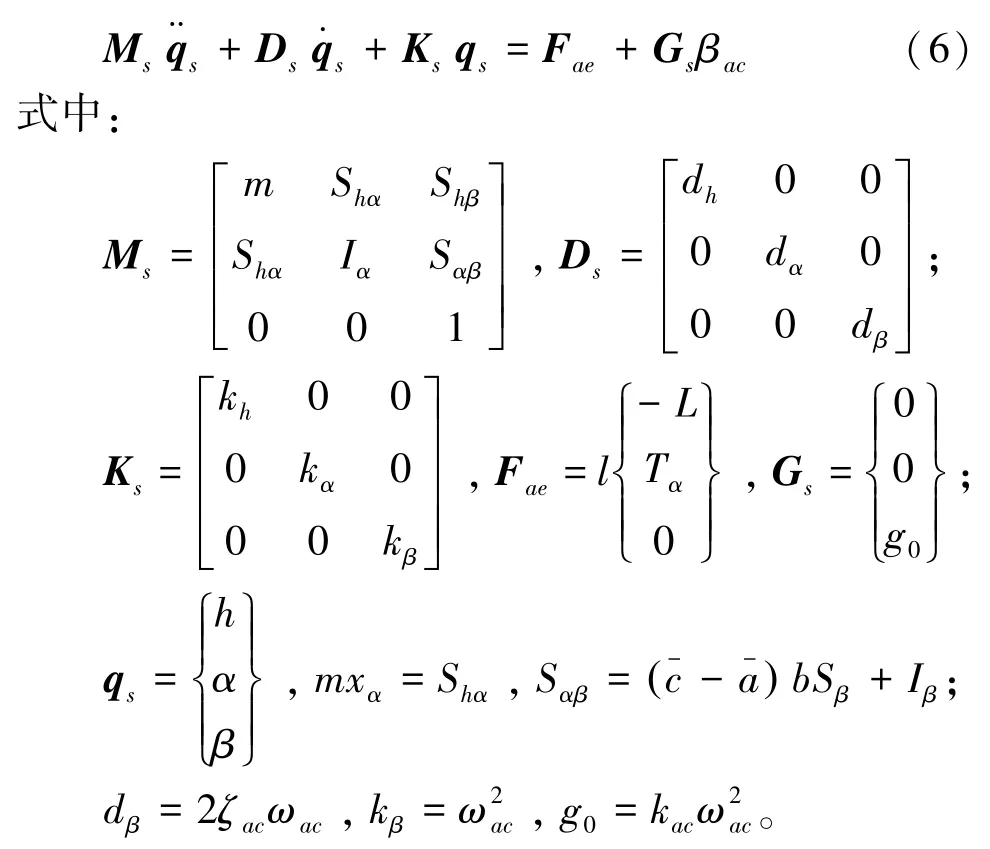
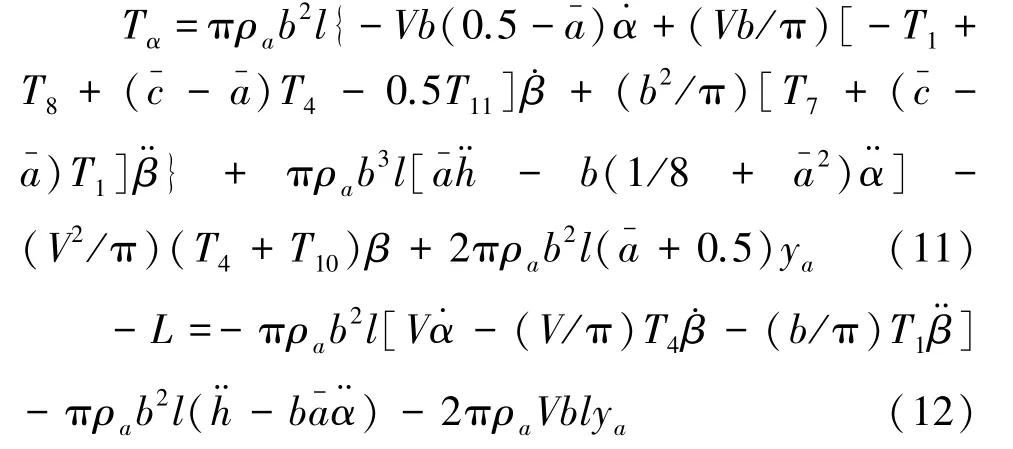
二元机翼的运动方程为:

其中,k(α)可通过对非线性弹簧的实测位移-力矩数据进行曲线拟合得到:

不可压缩流下的二元机翼振动抑制采用非定常气动力。根据Theodorsen 气动理论,气动升力和气动力矩可为如下形式[19]:

其中,Ti(i=1,4,7,8,10,11)为Theodorsen 常数,取决于弹性轴位置和控制面铰链位置,C(k)为Theodorsen 函数。
控制面可用如下二阶微分方程表示[19]:

根据式(17)、(18),得到包含作动系统动特性在内的机翼运动方程为:
1.2 状态方程
为了计算的简便性,将C(k)写为Jones 近似形式[20]:
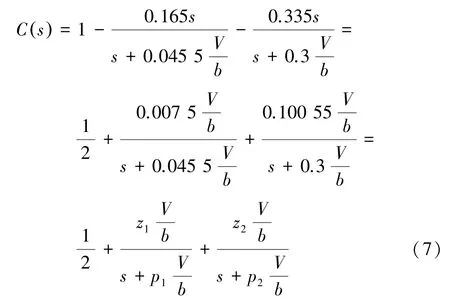
式中,z1=0.007 5;z2=0.100 55;p1=0.045 5;p2=0.3;s为Laplace 变量。
引入空气动力状态变量,C(s)对应的状态方程为:
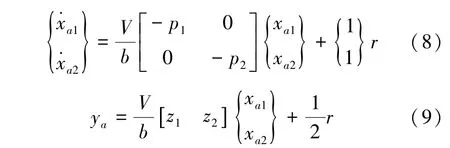
该系统的输入为:
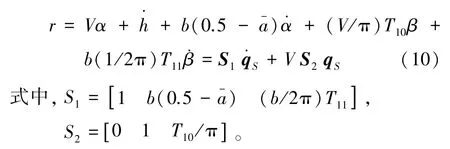
气动力公式可以重写为:
气动力Fae表示为非环量部分和环量部分之和的形式,即:

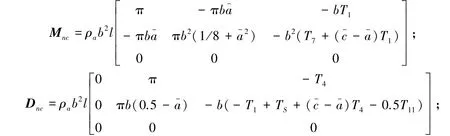
根据式(24),非环量部分可表示为:

式中,

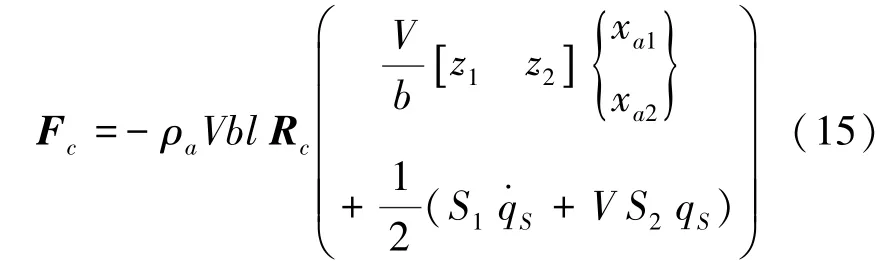
环量部分Fc可表示为:
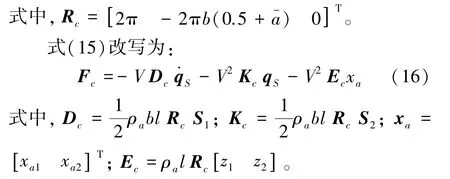
根据式(13)、式(14)和式(16),式(6)可以写成如下形式:

结合式(28)和式(29),得到机翼气动弹性方程的状态空间为:
2 控制方法
在实际应用中,系统的状态一般难以直接测量,因此,应用到输出反馈设计。p(t)包含所估计的状态向量x2(t),假设只有状态x2(t)为可测的,其余状态都不可观测,系统输出为:

将上述状态方程转换成线性变参数(LPV)模型:

对于LPV模型,式(21)的系统矩阵S(p(t))可以通过高阶奇异值分解得到如下形式的TP模型表示[5,18]:

定义[18]如果权重函数满足式(23)、(24),并且所有权重函数的最大值为1 或者接近1,那么凸TP模型为CNO 类型。
观测器需要满足:当t→∞时,x(t)(t)→0,(t)为观测器估计的状态向量。为了实现这一目标,引入如下观测器结构:

上式结构采用多胞模型形式为:

其中,Kr,r=1,2,…,R为反馈增益,Kr由基于LMI 稳定性定理计算得出。
基于PDC 技术设计如下控制器:

其中,反馈增益Fr,r=1,2,…,R,Fr由基于LMI 稳定性定理计算得出。
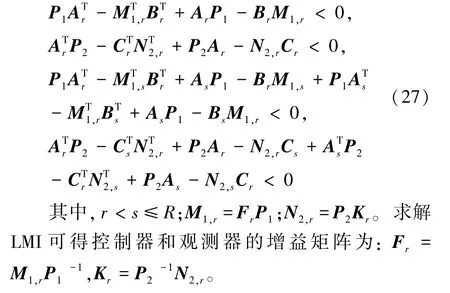
定理1[18](全局渐近稳定的观测器和控制器)如果带观测器和控制器的多胞模型渐近稳定,则存在P1>0、P2>0 和M1,r、N2,r(r=1,…,R,R为LTI 顶点系统的数量)满足如下线性矩阵不等式:
3 数值仿真
机翼相关结构参数见表2。选择变参数p(t)=(V,α),流速度V∈[15,30]m/s,俯仰角α∈[-0.15,0.15] rad。因此,Ω:[15,30]×[-0.15,0.15] 。网格密度为M1× M2(其中M1=31,M2=31)。在TP模型转换过程中可以看到,离散张量SD∈在第一维上的秩为3,分别为178 081.327 6、1 052.169 57 和1.372 03,在第二维上的秩为2,分别为177 969.499 61 和6 397 014 872;对SD进行HOSVD,得到3×2=6 个奇异值,LTI 顶点系统的数量也为6。在本例中,选择一个接近正态类型的权重函数,权重函数w1,i(V),i=1,…,3 和权重函数w2,j(α),j=1,…,2,如图2 所示。
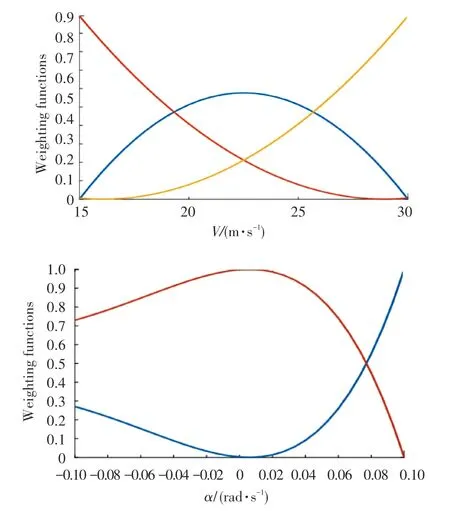
图2 V 和α 的权重函数Fig.2 Weighting function of V and α

表2 机翼的结构参数值Tab.2 Structural parameter values of wings
可以得到3×2=6 个线性时不变(LTI)系统的顶点。该气动弹性模型可以用6 个LTI 系统的有限元凸TP模型形式精确描述。实际上,可以尝试从式(21)中解析得出权重函数和LTI 系统。此外,如果第一维度的第三奇异值相对较小,则可通过丢弃其来进一步降低维度,产生一个缩小的2×2 TP模型。但在此情况下,其只是该模型的近似值。α的权重函数可以从k(α)中提取,U 的权重函数将来流速度作为未知量来提取的。根据具体情况,生成的TP模型可能只是气动弹性系统的近似值,并且包含不同且可能比本示例中更多的LTI 系统。然而,如果生成的结果中保留足够数量的非0 奇异值,则生成的TP模型将具有可接受的精度。
将所得LTI 顶点系统代入定理1 的LMI 中,LMI 求解器显示不等式组在当前情况下是可行的,控制器与观测器的增益矩阵如下:
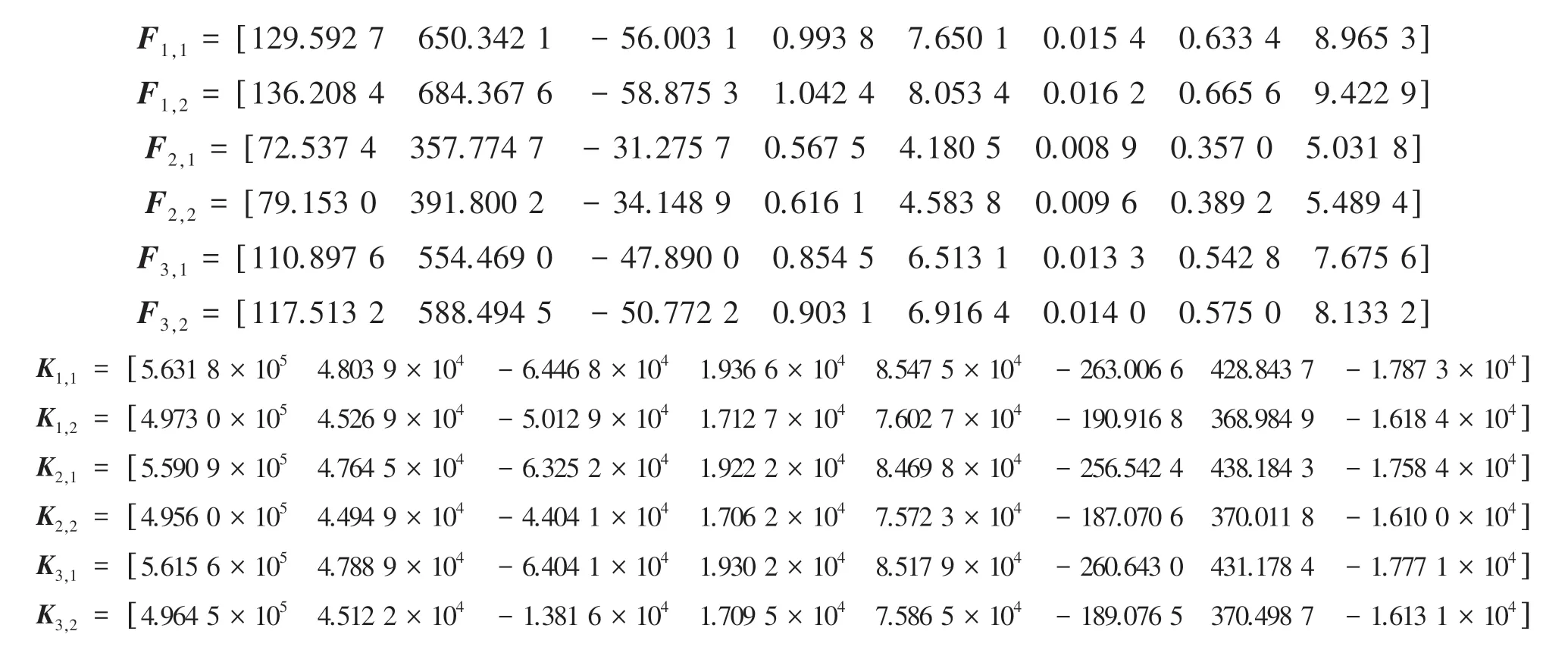
得到如下控制器和观测器:
在本例中,对观测器与控制器选择不同的初值。来流速度为V=23 m/s,速度已大于该模型的颤振速度(颤振速度为21.8m/s);系统初值为x0=[0.01,0.05,0.1,0.01,0.05,0.1,0.01,0.01]T,观 测器初值选择为=[0,0,0,0,0,0,0,0]T。
在包含模型(式19)、控制器(式28)、观测器(式29)的闭环系统中,系统各状态的响应曲线如图3~7 所示。为了显示控制效果,模型(式19)开环系统的仿真结果也显示在图中。

图3 控制输入Fig.3 Control input
从这些图中可以看出,观测器所有的状态估值,可以较好地跟踪闭环系统的真实值,闭环系统可以快速稳定。由图4 中可以看出,浮沉位移及其变化率的跟踪效果相对于其它状态较差,系统的真实值快速收敛到0,而浮沉位移及其变化率的估计值发生较大的震荡。从图5 和图6 中可以看出,俯仰角及其变化率、控制面偏转角及其变化率的跟踪效果较好,控制面偏转角的变化率约达到320。由图7中可以看出,两个空气动力状态变量跟踪误差较小,震荡相对于其它状态较为剧烈。
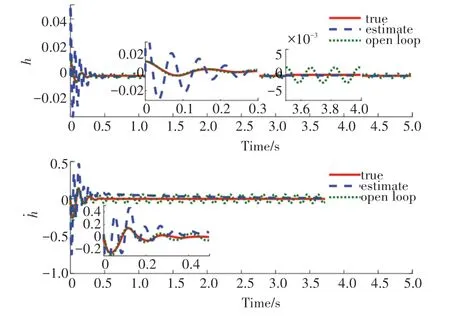
图4 系统状态h、及其估计值Fig.4 System states h,and their estimation
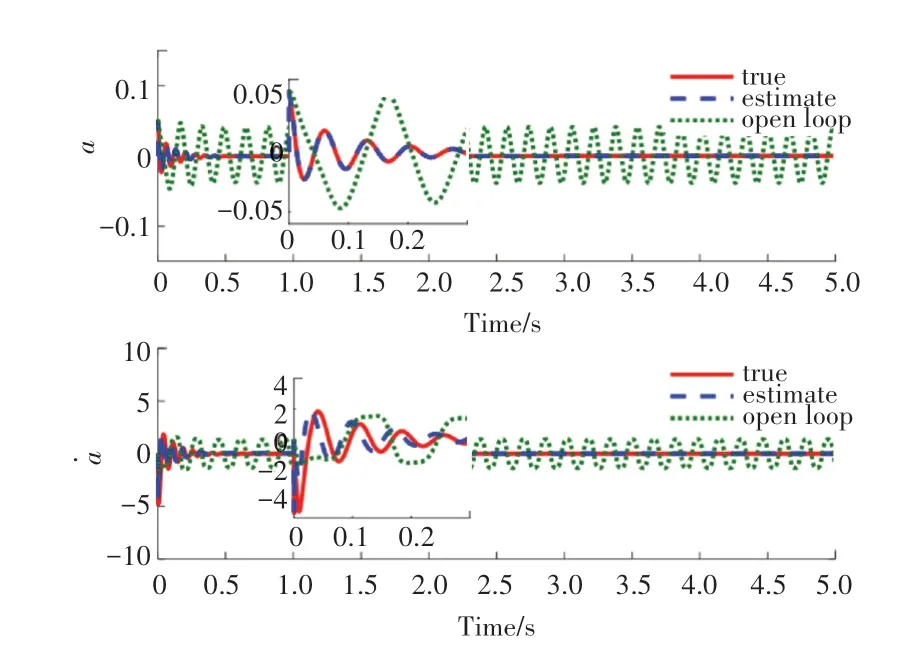
图5 系统状态α、及其估计值Fig.5 System states α, and their estimation

图6 系统状态β、及其估计值Fig.6 System states β,and their estimation
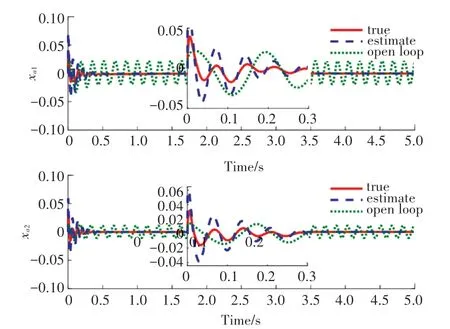
图7 系统状态xa1、xa2及其估计值Fig.7 System states xa1, xa2 and their estimation
4 结束语
本文针对具有非定常气动力和结构非线性的机翼振动问题,建立了带后缘控制面的机翼状态空间方程,设计了一个观测器来获得不可测量状态的估计值,并结合张量积模型变换的控制设计方法,获得系统的控制器和观测器。数值仿真结果表明,控制器能够快速稳定系统,观测器的估计值能较好地跟踪系统的真实值,验证了所提方法的可靠性。