基于车辆轨迹的信号交叉口机非冲突判别
2021-02-27龙科军张燕邹志云谷健郝威
龙科军,张燕,邹志云,谷健,郝威
(1.长沙理工大学,a.智能道路与车路协同湖南省重点实验室,b.交通运输工程学院,长沙410114;2.华中科技大学,土木工程与力学学院,武汉430074)
0 引言
城市道路交叉口汇集了机动车、非机动车和行人等交通流,这种混合交通特性影响交叉口的运行安全与效率[1]。近年来,交通冲突技术作为机动车安全评价的替代方法得到广泛应用,如何针对机非冲突特征,提出科学的机非冲突判别方法,对改善交叉口安全具有重要意义。
交通冲突判别方法有两种:其一,以是否发生避险行为作为评判标准,基于机动车的减速与转向行为来判别[2],该方法缺陷在于避险行为不易观察;其二,以空间或时间上的接近程度作为判别依据,包括距离碰撞时间(TTC)、后侵入时间(PET)等[3]。TTC为冲突判别的常用方法之一,国际上采用2.0 s作为判别冲突的依据,国内学者利用85%累计频率法得到冲突界定标准为TTC小于1.6 s[4]。TTC法适用于具有相同运行轨迹的冲突,如追尾冲突,用于交叉冲突时准确性降低。TTC 法的标准是冲突双方在同一时刻到达冲突点,因对冲突的定义过于精确,会漏掉一些高风险冲突,比如:冲突双方先后通过冲突点,但是时间差非常短,按照TTC 标准此次事件不是冲突,而实际情形下,该类事件非常危险,应该被判断为一次冲突。PET 是两个交通参与者通过一个公共区域的时间差,适用于轨迹相交的冲突,但该方法只能用于冲突发生后评价。此外,王玉全[5]建立了定量判别的机非冲突数学模型;郭伟伟[6]提出了基于临界冲突区域的冲突判别模型,但实际冲突过程中,临界冲突区域会随机动车速度、角度实时变化,导致临界冲突区域难以确定。
实际的交叉口内,非机动车稳定性差,运行轨迹随机多变,刹车和减速行为识别极其困难,故与车-车冲突相比,机非冲突具有难评估、后果不对等的特性,传统的车-车冲突判别模型难以满足机非冲突的分析与评估。本文选择典型信号交叉口采集运行视频,应用轨迹追踪软件提取机动车和非机动车的轨迹与运行数据,总结机非冲突特征,提出符合机非冲突原理和特征的判别方法。
本文采集高频车辆轨迹数据,结合机非冲突的时空分析,确定合理的冲突判别指标与标准,提出一种改进的TTC冲突判别模型,为道路交叉口机非冲突自动判别提供理论方法。研究成果可应用于交叉口机非冲突安全预警、改善设计和交通管理等。
1 数据采集与处理
1.1 数据采集
选择长沙市4 个机非冲突较为突出的信号交叉口,在天气良好、无风条件的工作日早晚高峰进行俯视拍摄。考虑到信号交叉口机非冲突主要发生在右转机动车和直行非机动车之间,故仅采集右转机动车与直行非机动车间的冲突数据。
1.2 机非冲突定义
提取机非冲突样本的首要任务是明确机非冲突的定义,多数研究中,将其定义为“两个或两个以上的道路使用者在空间和时间上互相接近的可观察情况下,如果它们运动保持不变,就有发生碰撞的危险”[7],同理,本文以机动车与非机动车是否具有发生碰撞风险作为机非冲突判别的定性标准。
1.3 机非冲突样本提取方法
由于不同驾驶员和骑行者对风险的理解、风险应对行为存在差异,一次机非冲突中,可能会产生两种不同的操作行为,即采取避险措施和无避险措施。采取避险行为的机非冲突,机动车与非机动车相互接近且有发生碰撞的可能时,其中一方或双方采取制动、转向等避险行为;无避险行为的机非冲突,机非双方在行驶过程中有碰撞的危险,但没有或无法发现两者采取明显的刹车、换道等避险行为。
针对两类冲突样本采用不同方法提取其特征参数:有避险行为冲突样本,以避险行为引起的车辆运动速度或方向改变的瞬间位置,作为冲突测量的基点,分别提取速度、位置、加速度等数据;无避险行为冲突样本,按照当前速度,以距离潜在冲突点时间2 s 作为冲突测量的基点。图1为冲突样本提取示意图。
1.4 数据处理
采用轨迹追踪软件获取机动车和非机动车轨迹如图2所示,共采集254 组样本,其中,避险行为机非冲突样本170组,无避险行为样本84组。对轨迹数据进行平滑处理,提取数据如表1所示,包括冲突速度(机非冲突发生时双方的瞬时速度),冲突角度(双方行驶方向所成夹角),冲突距离(冲突发生时双方的距离),t1、t2(机动车与非机动车到达冲突点的时间)。
2 机非冲突特征
以冲突样本数据开展统计分析发现:冲突发生时,机动车与非机动车速度较小,平均速度分别为3.05 m·s-1和3.46 m·s-1;右转机动车与直行非机动车以追尾冲突为主,冲突角度平均值为36.8°;机非冲突的避险行为以减速为主,170 组避险行为冲突样本中,转向行为仅5 起,减速行为165 起,且减速度值较小,均值分别为机动车-1.04 m·s-2,非机动车-1.01 m·s-2;在有避险行为冲突样本中,机动车与非机动车到达冲突点时间t1、t2的85%位值都等于2.0 s,这与传统的TTC法是一致的。详细的统计结果如表2~表5所示,其中,表2和表3样本量为254起,表4和表5样本量为165起。

图1 机非冲突测量基点Fig.1 Measurement base point of vehicle-non-motor-vehicle traffic conflict

图2 机非冲突轨迹示意图Fig.2 Schematic diagram of vehicle-non-motor-vehicle traffic conflict trajectory
应用轨迹数据进一步分析机非冲突下避险行为特征,如图3所示。发现机动车/非机动车到达冲突点前有4种情形:无避险行为、机动车减速、非机动车减速和两者同时减速。当机动车先到达冲突点时,非机动车减速是主要避险行为,占57%(54起);非机动车先到达冲突点时,无避险行为的比例最高,占40%(58 起),机动车减速占38%(56起);在机非冲突中,同时减速的情况较少,分别占13%(12 起)、9%(13 起)。避险行为统计结果表明:机非冲突中,因非机动车行驶灵活、轨迹路径不可测,加之交叉口内机非速度都较慢,避险行为具有较大的离散性。

表1 机非冲突样本数据示例Table 1 Samples of vehicle-non-motor-vehicle traffic conflict data

表2 冲突速度统计结果Table 2 Statistical results of conflict speed

表3 冲突角度与距离统计结果Table 3 Statistical results of conflict angle and distance

表4 减速度统计结果Table 4 Statistical results of deceleration

表5 t1、t2 统计结果Table 5 Statistical results of t1、t2
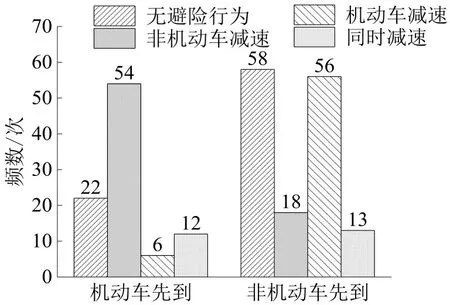
图3 避险行为统计Fig.3 Statistics of risk aversion behavior
3 机非冲突判别方法
3.1 评价指标
(1)问题提出
目前,最常用的交通冲突评价指标TTC 是指冲突双方维持目前速度和轨迹行驶,两者行驶到碰撞点的时间,仅当两者同时到达冲突点时被判为一起冲突,显然,该方法理论上正确但与实际不符。当交通参与者以当前轨迹行驶,且以很小时间间隔先后通过冲突空间,此时,两者的运动状态相互影响,碰撞的风险较大,速度和轨迹的微小变化都将引发碰撞,故这种情况应被判定为高风险。相关研究也发现,当驾驶员以很短的时间间隔错过对方的情况下,即使没有碰撞过程,驾驶员还是感觉到并表现出像在碰撞过程中[8],应该将其看作一次冲突。然而,按照TTC 法,此次事件不能被判定为一起冲突,这说明经典TTC 法不足以检测所有潜在的危险情况。
由此,本文提出一种改进型TTC的机非冲突判别方法,将机非冲突定义为在道路空间、时间内机动车与非机动车相互接近,交通参与者按照当前速度与轨迹行驶,到达冲突点的时间差小于阈值并且距离碰撞点的最大时间小于阈值的交通事件。
(2)评价指标
改进型TTC法包括两个评价指标:冲突时间差TDTC(Time Difference To Collision)和距离碰撞最大时间MTTC(Maximum Time To Collision)。
TDTC 为某个时刻交通参与者按照当前速度和轨迹行驶,前车与后车到达冲突点的时间差[9]。如图4所示,机动车与非机动车分别以速度v1、v2驶入冲突点,考虑到非机动车体积小,运行灵活,其尺寸大小对冲突判定的影响较小,可以忽略;机动车体积大,通过冲突点需要一定时间间隔,必须考虑机动车长度对冲突的影响,TDTC计算公式为

式中:d1为机动车到达潜在冲突点的距离;d2为非机动车到达冲突点的距离;l为机动车车长;v1为机动车瞬时速度;v2为非机动车瞬时车速;α为运行速度夹角。

图4 机非冲突示意图Fig.4 Diagram of vehicle-non-motor traffic conflict
MTTC 为冲突双方维持目前的速度和轨迹行驶,到冲突点所需时间的最大值。MTTC作为评估碰撞接近度的指标,选择两者距离冲突点最大时间,因为第2 个到达冲突点更加安全。MTTC 计算公式为

3.2 冲突时间差TDTC与避险行为相关性分析
为获得机非冲突判别指标TDTC的阈值,先对TDTC 与避险行为进行相关性分析。统计得到不同TDTC 下避险行为情况,如表6所示。当非机动车先到达冲突点,TDTC为0.0~1.0 s时,非机动车避险占10%(15 起),机动车避险占37.7%(55 起),同时减速占9%(13 起),无避险行为占43%(63 起);当机动车先到达冲突点,TDTC为0.0~0.8 s时,非机动车避险占58%(55起),机动车避险占7%(7起),同时减速占13%(12起),无避险行为占22%(21起)。
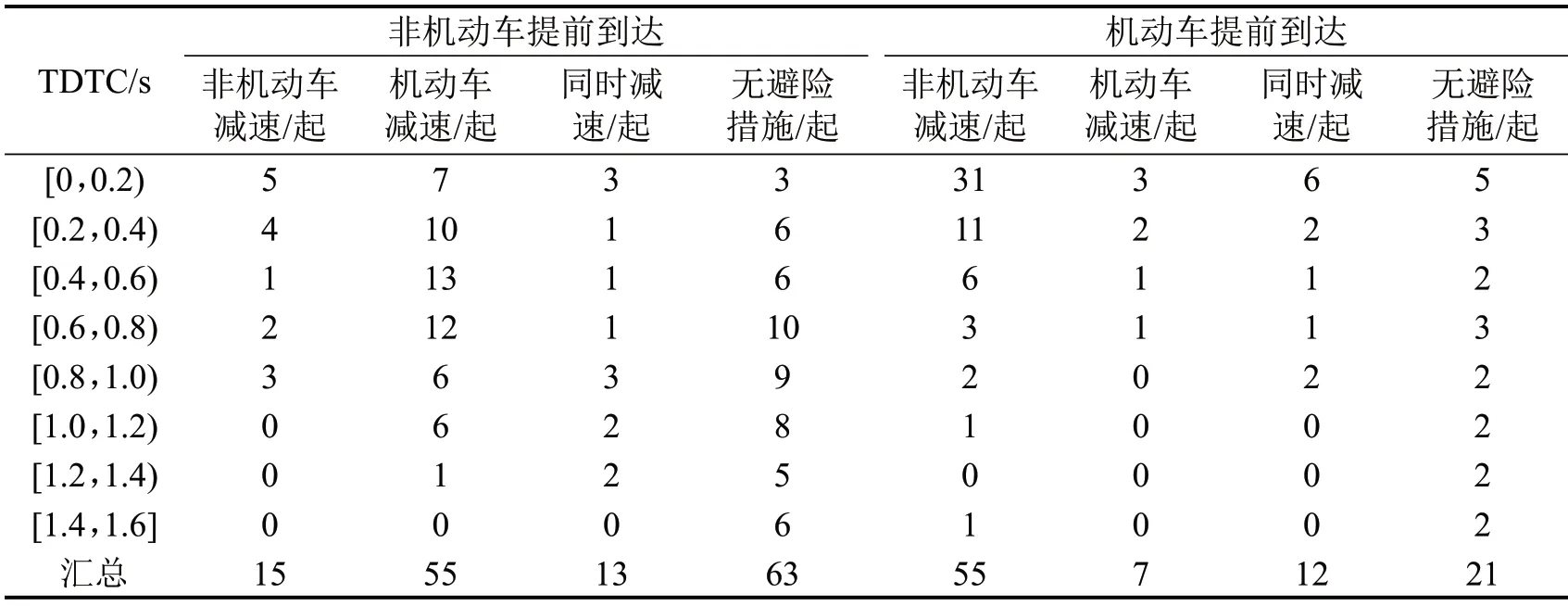
表6 避险行为分析Table 6 Risk aversion behavior analysis table
由表6得出,在TDTC 较小时,通行权不明确,此时发生碰撞的可能性较大,冲突双方会采取不合理的避险行为;随着TDTC 增大,通行权界限逐渐清晰,车辆避险行为减小;当TDTC足够大时,一方到达冲突点的时间明显早于另一方,晚到的一方会采取刹车或者躲避行为;当TDTC大于1 s时,车辆能选择正确的方式通过交叉口,且不需要采取避险行为。
3.3 机非冲突定量判别
上述避险行为统计表明,TDTC 能够表达碰撞发生可能性,TDTC 越小,发生碰撞的概率越大。文献[9]中TDTC取0.66 s作为机非“严重冲突”的判别标准,本文应用244 组机非冲突样本的TDTC 数据,得到TDTC的累计分布如图5所示,发现频率曲线在85%出现“拐点”,参考文献[4],选取85%位累积频率对应的TDTC 作为机非冲突界定值,得到TDTC的阈值为1.1 s。
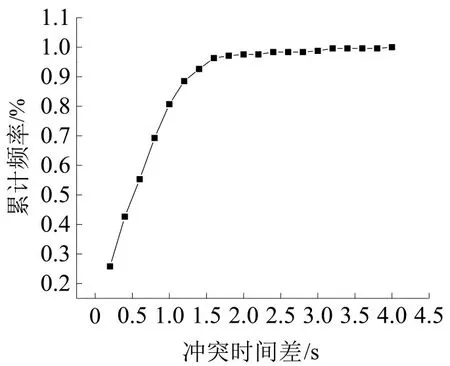
图5 机非冲突样本TDTC(冲突时间差)累计频率图Fig.5 Cumulative distribution of TDTC of vehicle-non-motor traffic conflict samples
TDTC 仅为发生碰撞可能性的一个方面,碰撞风险还与距离冲突点时间有关,选择MTTC为另一个机非冲突判别指标。针对165 组有避险行为的冲突样本进行统计分析,MTTC 统计结果如表7所示,均值为1.53 s,85%位值为2.2 s。选取85%作为机非冲突界限值,MTTC的阈值为2.2 s。

表7 MTTC统计结果Table 7 MTTC statistical results (s)
综上,得到改进型TTC的机非冲突定量判别标准:某时刻,机动车与非机动车以当前速度和轨迹行驶,到达冲突点的时间差TDTC 小于1.1 s,且两者到达碰撞点的最大时间MTTC小于2.2 s。
3.4 模型检验
以某交叉口为例,分别应用PET、TTC、改进型TTC 进行机非冲突评估,其中,PET 通过轨迹数据统计得到。
考虑到机动车长度,TTC计算方法为

根据采集的254 组机非冲突样本,对PET 与TTC进行统计分析,结果如表8所示,PET的85%值为1.5 s,将该值作为机非冲突判别的阈值,结果与Archer等[10]研究一致,表明本文机非冲突判别方法是有效的。同理,应用TTC 法得到有效样本数78组,TTC的85%值为2.2 s作为冲突判别临界值。

表8 冲突指标统计结果Table 8 Statistical results of conflict indicators
为检验改进型TTC法的准确性,采集某信号交叉口运行轨迹,分别应用TTC 法、改进型TTC 法、PET 法和样本提取法进行机非冲突判别,其中“样本提取法”为本文1.2 节中所述的机非冲突样本提取方法,可以视为机非冲突的实际值,评价结果如表9所示。TTC 法得到的机非冲突次数仅为7 起,明显小于另外3种方法,这与前文中关于TTC的表述一致,进一步证实了TTC 的缺陷。改进型TTC法(22 起)、PET 法(24 起)与样本提取法(实际值25起)结果非常接近,证明改进型TTC 和PET 法能准确评估机非冲突。

表9 不同冲突度量指标判别结果Table 9 Evaluating results of different conflict metrics
4 结论
机非冲突特征分析表明,信号交叉口内冲突过程中,驾驶人可能采取避险行为或无避险行为,可能的避险行为有减速和转向,且减速度相对较小。因此,单纯以避险行为作为机非冲突判别的唯一依据存在缺陷,PET法对采取转向规避冲突的车辆不能识别。
本文应用高频、连续车辆轨迹数据,考虑机非冲突具有难评估、后果不对等的特性,结合分析机非冲突特征与现有冲突判别方法的不足,提出一种面向机非冲突判别的改进型TTC法,该方法引入了冲突时间差TDTC 和距离碰撞最大时间MTTC 两个指标定量判别机非冲突,应用机非冲突样本数据的统计分析,得到各指标的判别阈值。
应用TTC 法、改进型TTC 法、PET 法评估某实例交叉口,分别得到机非冲突数量。结果表明:TTC 法得到的冲突数量偏小,这与其方法缺陷相关;改进后的TTC 模型得到优化,评估准确率比TTC 法提高了2.14 倍;改进型TTC 模型与PET 法和实际的机非冲突水平保持一致,证明了本研究的正确性。