无人机与运输类飞机碰撞风险研究∗
2021-02-26
(南京航空航天大学民航学院 南京 211106)
1 引言
近年来,中国无人机产业快速发展,预计到2025年,中国民用无人机的市场规模将达到1800亿元,年均增长率超过25%[1]。随着无人机的普及,带来的安全隐患却不容小觑,国内已有多家机场发生多次无人机等不明飞行物入侵机场净空保护区的事件,2017年2月2日至5月3日,昆明长水国际机场净空保护区发生无人机“黑飞”事件不下6起。同年4月14日至4月30日,成都双流机场接连发生9起无人机干扰民航运行的事件,总计造成114个航班备降、超过40个航班延误、4架飞机返航、超过1万名旅客被滞留机场[2]。无人机无序飞行不仅干扰了运输类飞机的正常运营,造成比较严重的经济损失;而且可能导致运输类飞机与无人机发生冲突,严重影响飞行安全,甚至会引发飞行事故。因此有必要研究无人机与运输类飞机的碰撞风险,进而为无人机影响航空安全的评估提供理论基础。
国内外学者对飞机碰撞风险进行了一系列研究。国外,R.A.Paielli基于随机系统理论建立了在自由飞行下航迹预测误差模型,研究碰撞概率的近似解法[3];Adaska,J.W等通过扩展目标跟踪技术,能在较长时间范围内跟踪飞机轨迹的变化,开发用于计算空中碰撞风险的算法工具[4]。H.Durrant-Whyte等研究无人机防撞系统,使用蒙特卡洛迭代算法求解马尔科夫决策过程(POMDP)模型,提出快速解法[5]。国内,张兆宁等在自由飞行条件下,基于随机微分方程建立飞机碰撞风险模型,并通过Euler方法求解[6]。王莉莉等对经典事件模型进行改进,用球形曲面间隔层代替传统的平面间隔层,结合扩展碰撞盒概率关系比计算碰撞风险[7]。孟祥伟等对一种基于事件的交叉航路航空器碰撞风险模型进行了改进,补充考虑了垂直方向上的碰撞风险[8]。
目前,国内外主要研究空域中有人机之间的碰撞风险以及无人机编队的控制,然而对运输类飞机与无人机的碰撞风险研究并不多,为了弥补这一不足,本文研究无人机与运输类飞机的碰撞风险,因导致碰撞的影响因素很多,因此综合分析空域因素人为因素,监视雷达系统以及环境和管理因素5个角度建立碰撞模型(AHMEMCR模型)计算概率。
2 无人机与运输类飞机碰撞风险模型的建立
2.1 碰撞模型相关假设
由于无人机干扰运输类飞机运行大多是在低空空域机场附近,该区域内航线复杂,运输类飞机飞行密度高,容易引发冲突,而无人机在低空空域内飞行,没有过多的限制条件,其体积较小,速度慢,飞行路径多变,且飞行高度低。因此为建立碰撞风险模型作出以下假设:
1)运输类飞机的飞行轨迹较为固定,设进入终端区航段末端点为原点O,飞机进场水平方向上的分量为x轴的正方向,翼展方向为y轴,垂直于xoy面上的方向为z轴的正方向。建立的坐标系如图1所示。

图1 运输类飞机进/离场示意图
2)由于在终端区运输类飞机的速度va(km/h)和时间t(h)符合线性关系[9],利用回归分析的方法,可以得到某个终端区的飞机速度的线性函数,其函数关系为

无人机自由飞行,速率大小vb(km/h)在区间[vBmin'vBmax]上服从均匀分布,其密度函数为

3)运输类飞机进场或离场时间间隔t服从移位负指数分布[9],其密度函数为

其中:T为飞机在终端区飞行的平均时间间隔,h;∆tmin为管制间隔,h。
2.2 考虑空域因素影响的碰撞风险概率模型
在空域影响因素下,无人机与运输类飞机发生碰撞的概率取决于无人机出现在隔离空域的可能性,首先设定一个碰撞模板,如图2所示,设运输类飞机和无人机的机身长度、翼展宽度和机体高度(km)分别为λ1x,λ1y,λ1z,λ2x,λ2y,λ2z[10]。然后以运输类飞机为基准建立一个碰撞模板A,设其长、宽、高(km)分别为λx,λy,λz,其中,


图2 碰撞模板
将无人机看作一个质点B,如图3所示,这样两机相撞可以看作为质点B侵入了碰撞模板A。设当运输类飞机和无人机即将发生冲突时,无人机处于空域的某一点,vrl(km/h)为运输类飞机与无人机在xoy面的相对速度,而vrv(km/h)为两机在z轴方向上的相对速度:


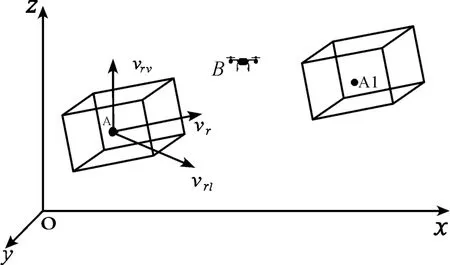
图3 碰撞示意图
无人机与一架运输类飞机与在机场终端区附近发生碰撞的次数为C=NV,通常认为,如果在空域中飞行器之间发生了一次碰撞相当于产生了两次事故,所以,当只考虑空域因素时在单位时间内无人机与运输类飞机的碰撞风险为

式中:t为运输类飞机在终端区的飞行时间;N为单位时间终端区内运输类飞机的数量,n为低空空域中无人机的密度。
2.3 人,机,环,管的影响
由于运输类飞机与无人机发生碰撞成因十分复杂,需要从多个角度系统分析,考虑到飞行员以及管制员等人为因素,雷达监视系统的状况,无人机系统可靠性,环境气象条件,以及机场和空管部门等管理因素也会对低空空域内飞行器的碰撞风险产生影响。
在空中运输类飞机与无人机的飞行间隔小于安全间隔时,假设短期冲突警告STCA会给管制员传送预警信息,收到目标信息的飞行员可以调整飞机姿态驾驶飞机保持安全间隔飞行;若STCA失效,无人机继续靠近运输类飞机,安全间隔继续减小,空中防撞系统TCAS发出警告,飞行员按指令采取避碰措施,假设STCA、TCAS、管制员、运输类飞机飞行员和无人机系统为互相独立的系统。因此,以上组成了一个混联系统,在此系统中发生碰撞的概率P为

其中P1为STCA的可靠度;P2为管制员的可靠度;P3为TCAS的可靠度;P4为运输类飞机飞行员的可靠度;P5为无人机的可靠度。
天气因素对飞行器的飞行活动也具有严重影响,在复杂的气象条件下碰撞风险会显著增大。但是由于气象条件复杂多变,对飞行器碰撞风险的贡献很难具体量化,因此,当运输类飞机与无人机存在碰撞风险时,定义此时的相关环境系数为k1,k1的大小取决于环境的好坏,k1=1时代表环境为理想状态,不会对飞行造成干扰;在0 综合以上碰撞风险因素,最终考虑空域、人、机、环、管五个维度建立AHMEMCR碰撞风险模型,得到无人机与运输类飞机碰撞风险CR: 为了验证模型的可行性,计算某终端区运输类飞机与无人机的碰撞风险。 目前市面上的民用无人机种类繁多,其型号尺寸区别很大,具体分析不同类型的无人机与运输类飞机发生碰撞的概率,为保护区的设置以及机场安全管控等问题提供依据。不同机型的相关参数如表1所示,其他模型相关参数如表2所示,根据运输类飞机进场或离场时间间隔t服从移位负指数分布,单位时间内有6架运输类飞机离场,由此通过Matlab软件可计算出相对平均速率平均值E(vr)。 表1 不同机型相关参数 表2 模型其他参数 因无人机的密度没有精确的数据,在此本文粗略估算无人机的密度来验证模型。根据民用无人驾驶航空器实名登记系统显示截止2018年无人机的实名登记数量达到28.9万架,参与无人机云交换系统进行数据交换的无人机共3.1万架,飞行时间为98.9万h,而我国低空空域开放的试点面积约为303.4万km2,因此估算低空空域内无人机的密度n为1.2×10-9架/km3。 考虑人机环管因素的碰撞风险,根据参考文件[11],STCA的可靠度P1为1×10-7,TCAS可靠度P3为0.9321,管制员的可靠度P2为0.963,运输类飞机飞行员的可靠度P4为0.933,无人机避碰的有效性P5为0.207。根据式(11)计算出人机系统能避免发生碰撞的概率P为0.8969。假设环境状况良好,没有出现恶劣天气,气象条件为理想情况,管理因素没有起到有效作用时,利用式(12),使用Matlab软件计算出碰撞风险,得到不同无人机机型对应的碰撞风险概率,对应的相对速率平均值与碰撞概率之间的关系如图4所示。以及碰撞模板表征值与碰撞概率之间的关系如图5所示。 图4 无人机各机型碰撞概率 图5 无人机各机型碰撞概率 根据计算结果,前三种无人机的碰撞模板表征值要低,也就是尺寸相对比后三种要小,因此得到的碰撞风险低于尺寸大的无人机,另外根据图4,X5UW是其中相对速率平均值最大的一个,但是碰撞风险却相对较低,这是因为虽然X5UW的速度大,鉴于其尺寸相对较小,所以得到的碰撞概率小,而T16机型相对速率小,但是其尺寸大,因此碰撞概率要大。说明碰撞风险与无人机的尺寸和与运输类飞机的相对速率有关,且其尺寸越大,相对速率越大,得到的碰撞风险也就越大,符合实际情况。 在考虑空域人机环管五种因素后,六种无人机机型与运输类飞机的碰撞概率结果均显著小于安全目标水平1.5×10-8起事故/飞行小时[12],其中最大的碰撞风险值为2.827×10-11次/每飞行小时,表明该终端区无人机与运输类飞机的碰撞安全风险处于可接受的水平。 综合以上分析,预防无人机与运输类飞机的碰撞风险是个系统工程,需要考虑各方面的因素,根据分析,为了有效控制风险,相关管理部门可以通过雷达监视设备预测附近的无人机数量,且对无人机机型以及速度进行限制,保障机场附近的航空安全,避免发生由于无人机的入侵,而导致不必要的安全事故,此外,管理机构可以根据空域因素、相关人员和设备以及环境和无人机管理方面具体分析相应的风险,从而有针对性地采取不同的管控措施控制风险。 本文通过研究在某终端区附近无人机与运输类飞机的碰撞风险,综合考虑空域人机环管五个维度的影响,建立AHMEMCR碰撞风险模型,利用Matlab软件计算得到不同类型的无人机与运输类飞机的碰撞概率,验证了模型的可行性,为以后评估与预防关于无人机对运输类飞机的安全风险提供理论参考,此外,具体飞行位置误差也会对碰撞风险产生一定的影响,下一步将继续研究分析在飞行误差情况下的碰撞风险模型,进一步加强风险评估体系的准确性。
3 算例分析




4 结语
