自主式水下机器人控制技术研究综述*
2021-02-25王永鼎孙鹏飞
王永鼎 王 鹏**, 孙鹏飞
(1.上海海洋大学工程学院,上海 201306;2.上海交通大学船舶海洋与建筑工程学院海洋工程国家重点实验室,上海 200240)
21世纪以来,人类对神秘海洋的认识和探索不断加深,水下作业装备对海洋资源的开发与利用的支撑作用日益凸显。水下机器人作为一种有效的深海探测装置已成为开发认识海洋的重要工具,具有机动灵活、续航时间长的显著优点。研制水下机器人并将其应用于海洋关键领域的重要性和战略意义不言而喻。其关键技术的开发代表了先进机器人技术在水下这一特定领域的应用实践和对机械、结构、材料、能源、流体、计算机控制等多种前沿技术的综合运用能力,一个国家的综合科技实力也很好地展现在类似于水下机器人等新型科技产品的研制水平上。
当今水下机器人种类众多,用途多样。具有水下观测考察和作业用途的水下机器人依据功能可分为探险型和作业型,依据是否配备载人舱又可分为无人水下机器人(Unmanned Underwater Vehicles,UUV)和载人水下机器人(Human Operated Vehicles,HOV),二者功能相辅、各具特点,通常在完成某些特定任务时需要联合作业,在某些故障和意外情况发生时需要彼此救援,因此,载人与无人水下机器人在用途上密不可分。无人水下机器人依据母船与艇体间是否有脐带电缆又可分为遥控水下机器人(Remotely Operated Vehicles,ROV)和自治水下机器人(Autonomous Underwater Vehicle,AUV)。ROV与水面母船之间利用脐带电缆连接,脐带电缆既由母船向艇体正向输送动力和控制信号,又由艇体至母船反向实时输送图像数据。而AUV与母船之间则无脐带电缆连接,它通过艇体配备的动力源以及自身的智能自主航行。
较之于ROV,AUV具有一系列显著优势,其活动范围广、下潜深度大、无脐带电缆纠缠、机动灵活性好、无需水面支持系统、体积小、便于维修保养等。AUV应用领域较为多样,在军用领域主要可用于地形测绘、水下施工、后勤增援、巡逻侦察、情报搜集、反潜战和水雷战等,因而世界各国为了增强国防实力的现实需要,皆争相致力研究先进的AUV系统。在民用领域,AUV普遍用于海事救援、海底光缆铺设与保养、海底矿产勘探和海洋生物研究、海洋环境科考及海洋考古等。由于受相关技术发展水平的制约,目前AUV相比于ROV还有较大发展空间。AUV不仅在海洋探索领域具有广泛应用,同时在池塘水质改良中也发挥着十分关键的作用,尤其体现在艇体可搭载传感装置对标准化池塘各区域水体变化进行实时监测和相关信息采集的工程意义明显。本文归纳分析了自主式水下机器人的研究现状,介绍了国内外具有较强代表性的相关研究部门及其典型AUV产品,并对主要的自主式水下机器人控制技术进行系统论述,同时对其在AUV控制上的相关工程应用进行较为全面的分析与研究。
1 自主式水下机器人研究现状与对比分析
水下机器人的研究最早可以追溯到1554年意大利人塔尔奇利亚发明制造的木质球形潜水器,至今已经有四百多年的历史。而世界上第一艘用于水文调查的自主式水下机器人(Self Propelled Underwater Research Vehicles,SPURV)于上世纪五十年代末在美国华盛顿大学应用物理实验室诞生,随后到六十年代中期各国学者纷纷将目光投向自主式水下机器人,然而受当时相关技术的制约,自主式水下机器人的研发进展一直徘徊不前。经历了初创时期和探索时期,直至20世纪80年代后期,由于控制领域和计算机领域相关技术的大幅进步,智能水下机器人技术开始蓬勃发展,许多临海国家尤其是西方国家都竞相致力于研发智能水下机器人技术和产品[1,2]。美国、英国、德国、法国、俄罗斯、澳大利亚、加拿大、日本以及中国等国家,均成立了专门研究机构或者在高校建立相应实验室研究水下机器人技术。进入20世纪90年代以来,自主式水下机器人的研发进展更是迎来了迅速发展时期,并随着水下自治机器人应用范围的不断拓宽逐渐形成系列产品。
1.1 国内外研究现状
AUV依赖自身智能和配备的能源自主航行,具有活动范围广和高度智能化等特点。当下各国研制的AUV型号繁多,极具代表性的有美国海军研究所设计的Bluefin系列和Hydroid公司生产的REMUS系列、英国南安普顿国家海洋中心开发的Autosub系列和BEA系统公司水下系统部研制的Tailsman系列、法国 ECA公司研发的Alister系列、德国ATLAS集团的ATLASMARIDAN公司研制的Sea Otter MK系列、加拿大国际水下工程公司研制的 ISE Expolorer系列、挪威 Kongsberg Maritime公司研制的 Hugin系列、丹麦研制的Maridan系列等[2]。其中知名的水下机器人由美国伍兹霍尔海洋研究所内海洋系统实验室设计开发,Hydroid公司加工制造的(Remote Environment Monitoring UnitS,REMUS)系列水下机器人,REMUS-100水下机器人被美英海军频繁地使用在执行濒海的反水雷任务中。该研究所同时研制出其余同系列水下机器人,如 REMUS-TIV、REMUS-600以及 REMUS-6000等[3]。
在澳大利亚国防科学技术组织制定的“纳夫松”计划的有序推进下,与该计划密切相关的Wayamba号无人潜航器研制任务在皇家海军的要求下被澳大利亚国防科学技术研究院顺利完成。该型潜航器艇体尺寸参数为:总长3 m、宽1.6 m、重900 kg,设计航速6 kn,实验潜深250m,有效载荷100 kg。载有前视声纳、双频扫描声纳、彩色和黑白摄像机、GPS接收器、高度计、罗盘、惯导装置等传感器[4]。Wayamba号采用模块化设计和分布式控制系统,具备航行机动灵活、活动范围广、导航和定位精度高,可适应高海况环境,通信能力可靠等优良的技术性能[5]。主要用于承担水下研究、部署、通信、探测和水下环境评估等任务。
日本东京大学工业科学研究所研制了r2D4、TEROA150&250、Twin-Burger1&2和 Tri-Dogl等不同型号的观测型AUV,主要应用于海底电缆布设和维护施工情况的实时监测。这些机器人在进行海底勘测实验活动中,得到了清晰的侧扫图像并在印度洋海底发现了世界最大熔岩平原,对海洋资源勘查以及海洋地质研究等方面具有重要意义[6,7]。艇体形似鱼雷的自主式水下无人航行器OKPL-6000由韩国Daewoo重工业公司的船舶海洋研究所与俄罗斯海洋研究所协作共同研发,主要用于海底探测、搜寻海底沉没物与执行相关海洋科学考察任务等[8]。
我国对自主式水下机器人的研究工作始于上世纪八十年代,其中处于国内领先水平、研发进程已进入实质性试验环节的研究单位主要有:中国科学院沈阳自动化所、哈尔滨工程大学、中船重工710所、上海交通大学、浙江大学、西北工业大学和天津大学[9]等。
中国的首艘自主式水下机器人为“探索者”号AUV,问世于20世纪90年代中期,其最大潜深1000米,由中国科学院沈阳自动化所、中国船舶总公司702所、中国科学院声学研究所、哈尔滨工程大学和上海交通大学等若干单位联合设计研制。中国科学院沈阳自动化所于1992年联合其他相关单位进一步开展了自主式水下机器人的研制工作,利用引进俄罗斯的技术,先后成功研制出“CR-01”和“CR-02”型 6000米级 AUV。此后,凭借自身掌握的开发技术和经验,又研制出“潜龙系列”探测型AUV,并成功进行海试,同时应用于深海资源勘查任务。2011年后中国构建了“探索系列”和“潜龙系列”两大AUV技术体系,分别应用于海洋科学研究和海洋资源勘查这两大主要领域。
中船重工710所研制出具有代表性的HD系列水下机器人。HD系列水下机器人工作水域宽泛同时适用于高海流和大水深环境。该系列AUV可进行三维全自由度空间运动且配备高精度水下定位系统和近、中距离声纳和电视、可搭载多种水下作业机械手广泛应用于水下搜救、打捞作业、海洋考古、堤坝与海床地质地貌勘查、海洋环境探测等工程领域。HD1型AUV具有三维机动性,续航时长4 h,其最大潜深300 m,最大直航航速7.5 kn,抗流航行能力3~4 kn,探测距离100 m,识别距离50 m,外形尺寸(长×宽×高):3.14×1.2×0.8 m,重量 700 kg[10-13]。
哈尔滨工程大学水下机器人技术国防科技重点实验室成功研制出一种鱼雷形智能水下机器人。该智能AUV具有五自由度运动能力,无法实现横滚运动。其最大的创新在于采用密封舱和艇体进水的设计理念。密封舱材质为玻璃钢材料,可经受水深100米压力,其位于艇体上方。舱内设备通过防水接插装置与舱外设备连接。艇体材质选用较轻的碳纤维材料,AUV水下航行时艇体内外水压平衡。在整个艇体下侧挂载了两个电池仓,仓体材质选用有机玻璃,分别向艇体提供设备电和动力电[14-19]。
1.2 典型产品对比分析
我国自主式水下机器人经过30多年的不懈探索,已经取得了丰硕的成果,同时积累了较为完备的AUV全流程研发经验。也产出了许多处于世界先进水平、具有代表性的典型AUV。但在装备的智能化、续航能力和核心部件制造方面仍有不足,在技术总体上也不如一些起步较早的国家成熟,有待于创新驱动进一步提升在自主式水下机器人关键技术领域的研发能力。尤其是对于开发具有军事作战用途的远程自主航行和长续航能力的高智能作业型AUV的研发技术才初步形成,更要加大力度攻关相关技术方面的难点,才能在较短时间内缩小与西方海洋强国的技术差距。要充分利用我国的相关技术和人才,群策群力,在材料、能源、导航、水声通讯、控制技术、传感器技术和人工智能等核心关键技术领域力争有所突破,注重学科交叉研究,加强相关技术在AUV研制过程中的集成和融合,对研制开发特定领域的AUV模块化和标准化积极促成统一方案。加强交流合作,对各研制单位所开发产品间的兼容性和彼此集群协同作业能力方面的信息共享和任务分配等工程应用要在开发初期进行设计。相关部门和研究机构要依据行业需求和现实需要制定好发展规划和研发计划,进一步加快自主式水下机器人谱系化研发进程和产业化进程。在AUV配套核心部件与专用设备生产上要形成专门研究机构和制造产业,丰富国内相关配套市场,促进研发进度,确保自主式水下机器人专用相关设备的生产不落后于设计研发和总体集成。同时也要加强对自主式水下机器人在突发状况下的应急自救和故障诊断相关技术的研究,这也是提高AUV在态势感知、环境交互和决策规划三方面自主能力的关键。随着专业研发团队的不断扩大和相关领域技术的进步,我国在未来研制自主式水下机器人的能力必定会不断增强。表1列出了国内外典型AUV及其性能对比情况。
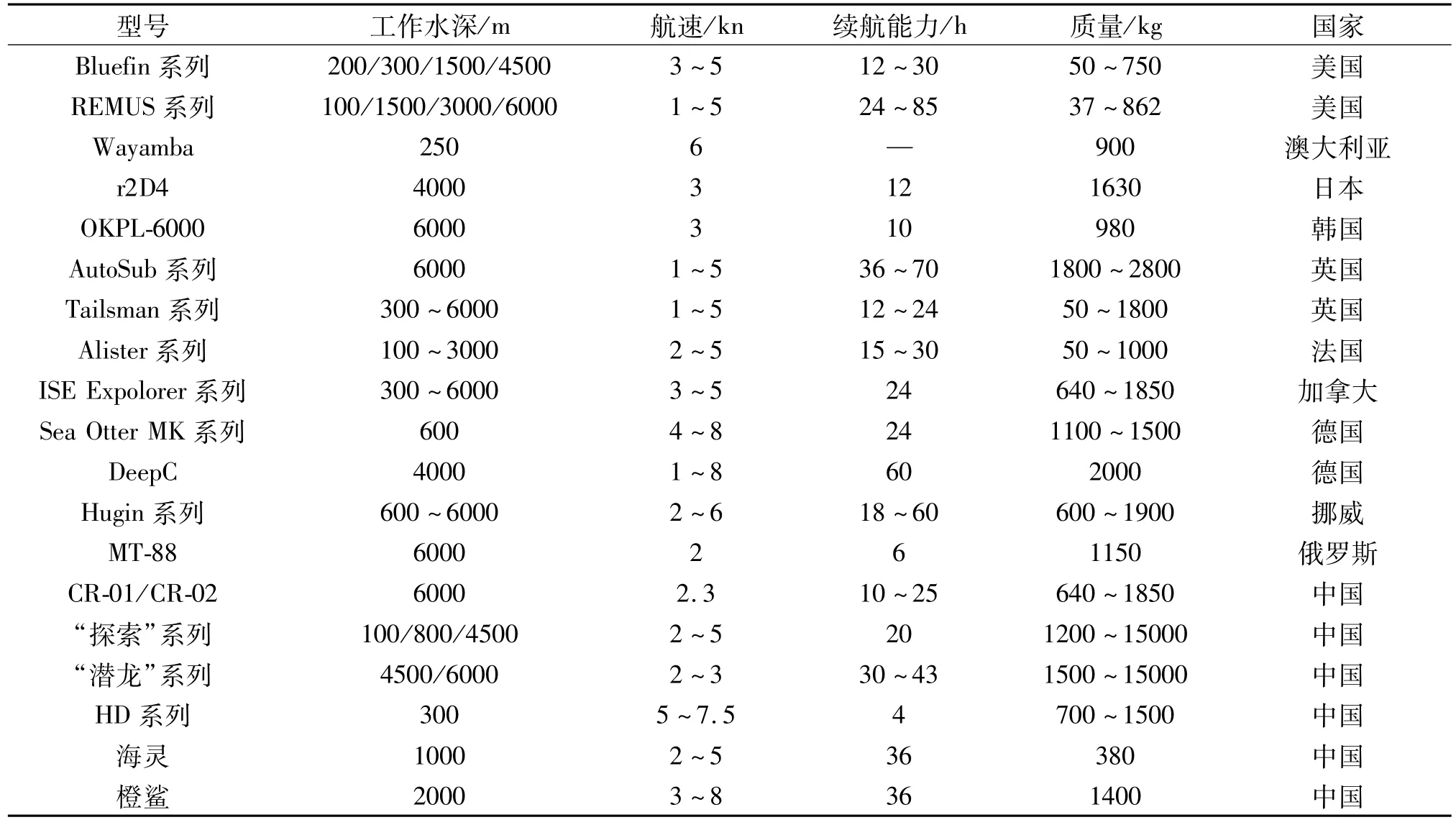
表1 国内外典型AUV一览表Tab.1 Typical AUV at Home and Abroad
2 自主式水下机器人控制技术
控制技术作为水下机器人研究工作中最为关键的技术问题之一,历来都是备受国内外专家学者密切关注的焦点。由于水下机器人在水中运动,工作环境相比于陆地上机器人差异明显,水下机器人的运动工况和控制特性自然也大不相同,不仅要保证控制的稳定性,而且还要保证足够的控制精度和效率。水下机器人控制技术的研究方向主要集中在以下几个方面:控制系统体系结构的构建、动力学建模与模型的合理简化及相关参数的优化、运动控制算法、导航策略、路径规划、避障和编队等[20-24]。由于水下机器人工作环境具有未知性,水下机器人控制问题向来是一个难点,参考国内外专家研究总结[25-30],造成其不易控制的主要原因为:
1)水下机器人运动具有强非线性、耦合性和时变性等特点。
2)机器人在水中运动时,实时获取精确的水动力系数十分困难。
3)流体环境中的实际运动对于流体密度和粘性变化较敏感。
4)海流干扰明显。
5)负载的变化导致重心和浮心发生偏移。
6)在不同的应用场合,水下机器人结构和形状有所不同,对应流体动力响应也会产生差异,相应控制方法及其效果不尽一致。
2.1 水下机器人控制方法概述
水下机器人能否完成预定任务的先决条件是能否对艇体的运动和位姿进行有效控制,国内外专家学者对水下机器人控制技术的研究也聚焦于此。由于水下机器人应用领域趋于多样化,在控制技术上对其运动控制的精度、可靠性及响应的快速性与功能的自主性和智能化方面也提出更高要求,如何提升其运动控制性能成为研究的一个关键所在。而水下机器人运动的典型特征是强非线性、水动力性能的时变性及不同自由度间运动的耦合性。水下机器人的精确数学模型通常不易获取,因而在水下机器人的控制问题上,不依赖于数学模型的控制方法应用潜力巨大。当前,国内外相关研究机构结合控制理论在水下航行器控制中的应用研究,关于水下机器人的控制方法主要涉及滑模变结构控制、模糊控制、自适应控制、神经网络控制、专家控制、PID控制、S面控制等。同时还有衡量以上各自控制方法优势与不足,为了弥补单一控制方法自身缺陷将多种控制方法加以综合应用的混合控制方法,如模糊滑模变结构控制、自适应滑模变结构控制、自适应神经网络控制、模糊神经网络控制、神经网络滑模变结构控制等[31-34]。在工程实际中为了达到较好的控制效果则往往采用两种甚至两种以上控制方法相结合的控制策略。
2.2 水下机器人主要控制方法
上一节水下机器人控制方法概述中给出了七种单一的水下机器人主要控制方法,下面将逐一对这些方法的原理以及相关控制机理进行简介。
1)滑模变结构控制
滑模变结构控制是一类特殊的变结构控制,最为显著的特征表现为控制的非连续性。该种控制策略下控制器结构的切换是依据系统当前状态偏离滑动模态的程度来实现的,控制器切换后系统将在控制律的作用下遵照预定滑动模态的规律运行。其控制机理为根据系统所期望的动态特性来进行系统切换面的设计和切换函数的选取,进而设计对应滑动模态控制器并确保系统状态收敛于切换面,系统状态收敛至切换面后将在控制作用下沿切换面滑动至系统原点。极点配置法、特征向量配置法、最优化设计方法等是常用的切换面设计方法;而滑动模态控制器的设计方法通常有固定顺序控制器设计、自由顺序控制器设计和最终滑动控制器设计等[35,36]。滑模变结构控制独立于系统精确的数学模型之外进行控制且在多输入多输出的非线性系统控制的应用中体现出优良的控制性能。因此,滑模变结构控制对水下机器人这种强非线性、时变性和对外界扰动敏感的运动控制问题具有较大的应用潜力。
2)模糊控制
模糊控制的基本思想是利用计算机来实现人的控制经验,是一种以模糊集合论、模糊语言变量和模糊逻辑推理为基础的智能控制技术。模糊控制不仅理论成体系,而且也兼具大量应用背景。模糊控制器的设计包括定义变量、模糊化处理、建立知识库、确立模糊规则和反模糊化这一系列步骤,其中定义变量为确定模糊控制器的输入输出变量并进行对应尺度归一化处理;模糊化处理即明确各变量的模糊语言取值及隶属函数;建立知识库为确立经模糊处理变量后得到的数据库和根据人工经验获得的模糊规则库;确立模糊规则为模拟人工判断时的模糊概念,基于模糊逻辑和模糊推论法进行推理,得到符合要求的模糊控制信号;反模糊化为使获得的模糊信号转化为系统可识别的信号,将其当作系统输出[37]。模糊控制在机器人控制领域应用广泛,也较适用于水下机器人的控制。
3)自适应控制
自适应控制是一种能感知环境变化并智能调节自身特性使得系统在设定标准下工作状态最佳的控制方法,其广泛用于航空、航海和军事等关键领域。自适应控制器相比于经典控制器而言,最突出的特点为系统自身参数并不是一成不变的,而是依据输入输出数据变化,通过持续的在线辨识来优化自身系统参数,进而达到理想工作状态。自适应控制可大致分为模型参考自适应控制方法和自校正方法两种[38,39]。由于自适应控制器能增强系统对外界干扰和机器人自身动力学特性变化的适应性,所以自适应控制十分适用于水下机器人这种工作环境复杂多变的控制对象。
4)神经网络控制
神经网络控制是一种基于人工神经网络对复杂非线性被控对象进行控制的策略。该控制策略是在现代神经生物学和认识科学对人类信息处理研究的基础上形成的,人工神经网络不但可以模拟生物神经网络行为特征处理指定信息而且还具有自学习和自适应的能力。将人工神经网络应用于控制领域,是控制理论不断丰富发展的有力体现,神经网络控制的发展与形成也是控制理论向智能化迈进的重要产物。神经网络控制在处理强非线性和严重不确定性多变量系统的控制问题方面具有很大潜力[40]。
5)专家控制
专家控制能够利用人类专家的知识和解决问题的经验方法来解决控制领域的相关难题,是一类可以在陌生环境条件下仿效专家智能对系统进行控制并使得过程控制达到专家级水准的计算机智能控制方法。专家控制器的设计关键在于知识库的构建与推理机制的确立,依据控制器在系统中的作用与功能,将专家控制器划为直接型专家控制器和间接型专家控制器两类。直接型专家控制器依靠相应反馈信息及知识库中的规则对系统进行直接控制,常适用于高度非线性或过程难以描述的系统控制问题[40]。间接型专家控制器通常和传统控制器组合使用,能够实现优化适应、协调组织等高层决策的功能。
6)PID控制
PID控制作为最早发展起来的经典控制策略之一,距今已有108年历史。其控制机理为依据给定值与实际输出值构成控制偏差,对偏差(Error)进行相应的比例(Proportional)、积分(Integral)和微分(Derivative)运算并加以线性组合构成控制量,进而作用于被控对象。作为线性控制器的PID控制器,已经被广泛应用于各种工业过程控制[41],在自主式水下机器人运动控制器的设计中仍大量选用。相应控制方程为:

传统PID控制在应用中存在静态误差与动态响应间难以调和的矛盾,比例控制环节动态响应迅速,但存在静态误差;积分控制环节虽可以消除稳态误差,但动态响应迟缓[17]。因此,为了取得良好的控制效果,工程应用中单独选用传统PID控制较少,大多是选用PID与其他控制方法联合的混合控制方法。如模糊PID控制、自适应PID控制、神经网络PID控制等。
7)S面控制
S面控制是一类利用模糊控制的思想同时参考PID控制结构而形成的复合控制策略,该策略通过利用一个Sigmoid函数来拟合模糊控制器中的控制规则不仅使得控制器设计流程大大减少,而且在控制性能上兼具模糊控制和PID控制的部分优点[42]。其控制方程为:

其中,参数k1和k2往往是根据经验所得,常用的参数调整方式为人工调整和自适应在线调整,自适应调整的方式不唯一,可以通过模糊原理等方法来实现[43]。
2.3 水下机器人控制技术分析
运动控制作为水下机器人底层控制系统不可或缺的首要组成部分是实现其智能化的关键,其主要包括以下几个部分:艏向角(AUV艇艏方向与地理北极的夹角)控制、深度(AUV重心距水面的垂直距离)控制、航速控制、位置控制和高度控制等[44,45]。考虑到水下环境的复杂多变和水深设备延时效应明显,不少学者长期致力于重点研究水下机器人的闭环控制。
为便于实现控制功能,通常对水下机器人各自由度间的运动耦合进行解耦处理,分别设计彼此独立的单回路闭环控制器来表征水下机器人的整体操纵功能。通常情况下,对水下机器人的深度、艏向和航速控制均需单独设计闭环控制回路,如下图1~3所示。为满足较高控制精度的要求,可加入纵倾角的闭环控制回路,但横滚角不加以人为控制[37]。水下机器人搭载的各类传感器是闭环控制回路中至关重要的装置,传感器精度与闭环回路的性能和控制效果的优劣也关联密切。

图1 深度控制回路结构示意图Fig.1 Schematic Diagram of the Depth Control Loop Structure

图2 艏向控制回路结构示意图Fig.2 Schematic Diagram of Heading Control Loop Structure

图3 航速控制回路结构示意图Fig.3 Schematic Diagram of Speed Control Loop Structure
1)深度控制回路
图1中,输入H0为设定深度,H为艇体实际深度,θ为实际纵倾角,K1为对应纵倾角反馈系数。由于深度计基本无延时效应,故深度控制响应执行能力较强[37]。在控制精度要求不高的场合,可不加入纵倾角反馈。
2)艏向控制回路
图2中,输入ψ0为设定艏向角,ψ为艇体实际艏向角,ψ·为艏向角角速度,K2为对应艏向角角速度反馈系数。加入艏向角角速度反馈能够提升系统响应速度和控制效果[37]。在控制精度要求不高的场合,可不加入艏向角角速度反馈。
3)航速控制回路
图3中,输入u0为设定航速,u为艇体实际航速,˙u为加速度,K3为对应加速度反馈系数。加入加速度反馈能够改善航行稳定性。
纵使控制技术持续向前发展,新的控制算法接连涌现,但大都尚在理论探索阶段,真正推进至水下机器人上的应用实现还有很长的路要走。考虑到建立水下机器人的精确模型的实际困难和进行相关试验的复杂性,在工程实际中,要确保控制算法稳定可靠、鲁棒性强,参数意义明确且具备一定冗余量,方可达到对水下机器人预期的控制效果。
3 结语
本文通过参阅大量参考文献,首先归纳分析了国内外自主式水下机器人的研究现状:主要介绍了关于最早研究水下机器人的历史以及后来随着多领域技术的发展演进,国际与国内知名的水下机器人专门研究机构和相关院所纷纷着眼于AUV的开发研制,AUV系列产品在这一时期开始大量涌现,同时选取了国内外一些技术相对成熟与先进且较具有影响力的AUV及其对应系列产品,并对其性能指标、功能用途和相关参数进行了详细介绍;在研究现状的基础上进一步对主要的自主式水下机器人控制技术展开系统论述:包括自主式水下机器人控制中存在的难点及成因、几种主要控制方法的基本原理和自身特性简介;最后对自主式水下机器人控制技术加以具体分析,为合理选用水下机器人运动控制方法、设计相应控制器提供了一定的参照依据。本文不仅为笔者在后续研究自主式水下机器人控制技术在标准化池塘养殖水质改良关键设备研发与优化课题的具体工程应用方面奠定了坚实理论基础,而且也为今后构建可靠的自主式水下机器人运动控制系统提供了有力支撑。
许多前沿的问题都来自于人类对神秘海洋的探索活动,但该活动受制于装备技术能力的高低。随着科学的发展,作为探索海洋资源的重要工具——水下机器人的设计研发也日臻完善,在未来会有更多用途愈加广泛且种类功能多样的水下机器人相继问世,我们认识海洋和经略海洋的目标将伴随着智能AUV研制技术的不断进步而逐渐达成。
