基于CFD的单体复合船水动力性能分析
2021-02-25黄松兴焦甲龙孙树政陈超核
黄松兴, 焦甲龙, 孙树政, 陈超核
(1.华南理工大学 土木与交通学院,广东 广州 510641; 2.哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
船舶在海浪中航行会产生六自由度的摇荡运动,进而对船上人员生活和设备工作造成影响[1]。船舶大幅运动还会引起剧烈的砰击上浪等现象,进而对船体结构强度造成威胁。为提高舰船在高海况下的耐波性,各种类型的复合船型,例如水翼船、穿浪双体船和三体船[2-4]等被研发采用,但这些船型的建造工艺复杂、维护成本较高,难以满足广泛的实际应用。常规圆舭型单体船被广泛采用,它具有船体型线光顺便于设计加工等优点。然而,随着远海大型舰船的需求不断增加,研发能够在高海况下平稳作业的新船型是十分必要的。深V船型是一种高性能单体船,其耐波性较圆舭船型有明显改善,但其快速性一般较圆舭船型稍差。为进一步提高深V船型的耐波性能,可在其艏部加装经过优化的半潜体[5]。当船舶在波浪中产生垂向运动时,半潜体会产生与船舶垂向运动方向相反的阻尼力,当其以攻角在波浪中前进时还会产生动升力,从而产生与船舶垂向运动相反的粘性力达到减摇的目的。总之,半潜艏减摇的原理是由于流体粘性力的作用[1],然而常规势流理论无法考虑流体粘性效应,不能合理预报加装减摇附体船型的水动力性能。
近年来,随着计算机科学与技术的不断发展,基于CFD技术的船舶水动力预报方法得以迅速发展。Yeung等[6]采用二维RANS方法求解带舭龙骨柱体剖面的附加质量和阻尼系数。Sherbaz等[7]采用粘性理论进行KCS船型纵倾优化计算。Hosseini等[8]将CFD技术应用于强非线性波浪和船体运动的仿真。Phan等[9]采用RANS方法计算多种二维剖面的横摇阻尼。孙鹏[10]采用湍流模型计算深V型剖面、半潜艏剖面等多种船型的水动力性能。蒋银等[11]利用CFD软件对三维带舭龙骨船体进行自由横摇衰减运动以及强迫横摇运动的数值模拟研究。Guo等[12]采用RANS方程对KVLCC2在迎浪中的附加阻力和船舶运动进行了预测。本文基于CFD方法对单体复合船型的横摇自由衰减特性、静水阻力以及规则波中的耐波性能的进行模拟计算,并与圆舭船型进行对比,分析研究加装减摇附体半潜体对船舶阻力和耐波性能的影响。
1 数值模型
1.1 CFD数值方法
本文基于CFD技术研究船舶在静水及波浪中航行的水动力性能。在笛卡尔坐标系下,对于三维连续、非定常、不可压缩流体的连续方程和动量方程分别为:
(1)
(2)
式中:ρ为流体密度;μ为流体动力粘性系数;xi为坐标系分量;Ui为流体平均速度分量;u′为速度波动;P为平均压力。
雷诺平均应力张量计算公式为:
(3)
在数值湍流流动计算中,采用Realizablek-ε湍流模型得到Boussinesq的湍流涡粘度和速度之间的关系。湍动能k和湍流能量耗散率ε通过Realizablek-ε湍流模型[13],由以下2个输运方程给出:
(4)

(5)
式中:模型的临界系数C1和C2表示平均流和湍流属性的函数。对应的k和ε的湍流普朗克常数分别取σk=1.0,σε=1.2。采用基于SIMPLE算法[14]的分离式求解器求解压力-速度耦合方程,非定常项采用具有二阶精度的欧拉隐式离散格式。自由面的捕捉采用VOF方法,并考虑重力作用。
船体运动控制方程[15]可表示为:
(6)
式中:m为船体质量;v为质心运动速度;f为作用在船体上的合力;I为随体坐标系中绕船体重心的各轴转动惯量;ω为随体坐标系中的船体角速度;N为作用在船体上的合力矩。
1.2 数值模型建立
本研究选取某传统圆舭船型为参考船型,在改进的深V船型基础上加装半潜艏减摇附体,从而进一步提高深V船型的耐波性能。为提高计算效率并与试验结果进行直接比较,采用1∶50缩尺模型进行数值建模与计算。采用STAR-CCM+建立的2种船模如图1所示,模型主尺度参数见表1。深V船型艏部加装的减摇附体的示意图见图2,半潜艏的主要参数见表2。

图1 船型外壳建模

表1 船模主要参数

图2 半潜体示意(mm)
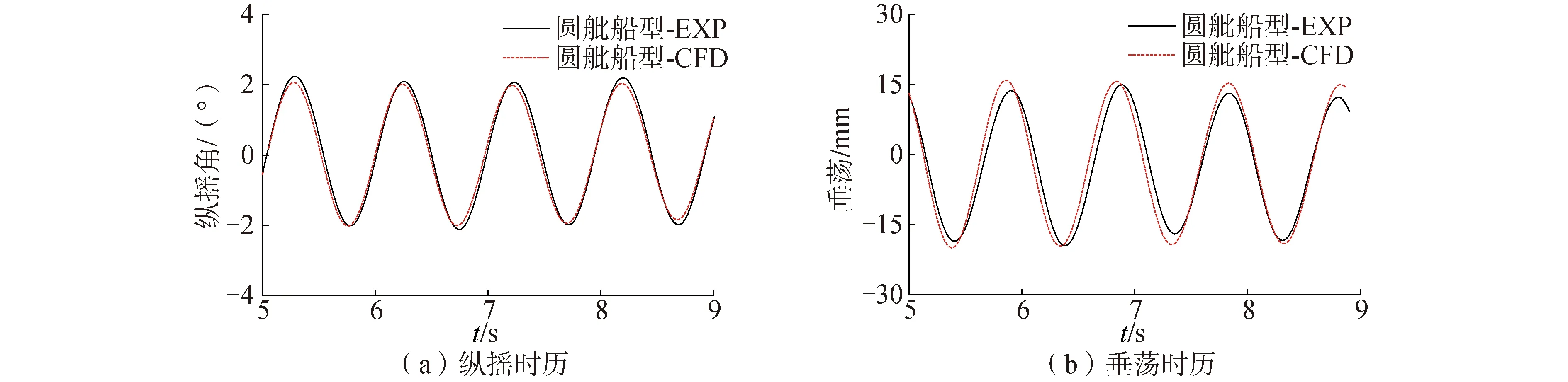
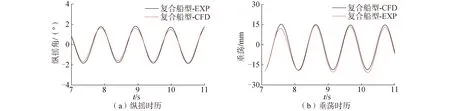
在流体域建模过程中考虑船体的对称性,只选取中纵剖面左侧部分建模从而提高计算效率。计算流体域尺寸为:-2.0Lpp 图3 流场计算域划分 采用六面体非结构化网格对计算域进行划分,为精确捕捉自由液面和船体周围的湍流等物理量的剧烈变化,在自由液面以及船体周围进行局部加密。自由面处网格尺寸需要根据入射波波高及波长确定,为此通过空场造波法预先试算,使所设置的网格可以避免波浪的显著衰减。为了避免壁面处发生波浪反射,在边界处对生成的VOF波附加阻尼进行消波。深V船型数值模型网格划分如图4所示,计算域的网格总数为287万。船模表面网格的划分情况如图5所示,船体外壳壁面设置6层边界层网格(y+值取30~60)。计算初始时刻船模处于静水正浮状态。自由度运动模拟采用DFBI (dynamic fluid body interaction)求解完成,计算过程中只释放垂荡和纵摇2个方向的自由度。 图4 整体网格划分 图5 船模表面网格 根据数值计算及优化所得到的船型方案,采用玻璃钢分别制作圆舭船型和深V复合船型的1∶50缩尺模型。试验在哈尔滨工程大学船模拖曳水池中进行,该水池长宽深分别为108、7、3.5 m。拖车最大航速为6.5 m/s,精度为0.001 m/s。水池装备的摇板式造波机可生成规则波和长峰不规则波,规则波最大波高0.4 m、波浪周期0.4~4.0 s。采用四自由度适航仪测量模型的阻力及运动信号,深V模型及其在适航仪上的安装如图6所示。试验模型的重量分布和重心位置等参数与数值计算模型保持一致。 图6 深V模型及试验装置 深V复合船型的舭部折角线区域会大幅增加船体横摇阻尼,使得深V船型的横摇稳定性明显优于圆舭船型。基于CFD方法模拟得到的2种船型在初始横倾角15°时的静水横摇自由衰减时历曲线如图7所示。由此可得基于CFD计算的圆舭船型的无因次衰减系数为2μ=0.035,此外基于船模试验所得无因次衰减系数为0.034,误差为2.94%。基于CFD数值计算的深V船型的无因次衰减系数为0.090,为圆舭船型的2.6倍。基于CFD模拟所得圆舭船型和深V船型的横摇周期分别为1. 667 s和1.421 s,这说明了加装减摇附体深V船型的横摇稳定性明显优于圆舭船型。 图7 CFD计算船模横摇自由衰减时历曲线 分别基于CFD数值计算和水池模型试验研究两船型在不同航速下的阻力特性,所得到的船模在定常段航行时的静水阻力、沉深值和纵倾角随航速变化的对比如图8所示。沉深值取上浮为正,纵倾角取尾倾为正。 图8 不同航速下的两船型阻力特性对比 根据静水阻力试验结果,在中低速段深V船型的单位排水量阻力和圆舭船型的阻力相当。随着航速的提高(Fn>0.349时),深V船型的阻力明显低于圆舭船型,例如在Fn=0.504(实船速度39 kn)时,深V船型的单位排水量阻力值比圆舭船型小14.12%。此外,基于STAR-CCM+的计算结果在Fn<0.388(实船速度30 kn)时与试验结果误差小于8%,但随着航速增大计算误差增加。总之,数值模拟所得两船型阻力结果趋势与模型试验结果吻合较好,可用于初步设计阶段的船型优选。 根据沉深和纵倾曲线结果,当Fn<0.15时,深V船型的重心沉深量比圆舭船型的略大。随着航速提高,由于半潜体的动升力作用,深V船型的重心升沉量减小。当Fn<0.4时,深V船型和圆舭船型的纵倾角都很小可忽略不计;当Fn>0.4时,两船型发生明显的艉倾现象且深V船型的纵倾量略小于圆舭船型。CFD计算结果和试验结果吻合较好。 图9为2种船型在实船航速18 kn、24 kn和30 kn的自由面波形对比图,图中上半部分和下半部分分别为圆舭船型和复合船型模拟结果。由此可见,在18 kn航速下,2种船型周围的兴波高度较小,深V船型的兴波场有较大的肩波,船艏艉的压差阻力比圆舭船型大。随着航速的增加,2种船型的兴波阻力迅速增大,深V复合船型艉部的鸡尾流更明显,增大了水线面的虚长度,这有利于提高深V船型快速性。 图9 圆舭船型和深V复合船型的静水航行自由面兴波 在圆舭船型和深V复合船型进行迎浪规则波中的CFD数值计算及水池模型试验中,波高取50 mm,波长船长比取0.8~2.2,实船航速取18、24、30 kn(对应模型航速1.309、1.746、2.182 m/s)。图10和11分别为水池模型试验所得两船型在不同航速下迎浪航行时的纵摇和升沉幅值无因次化结果。其中θ为纵摇角,k为波数,ζ为波幅,Z为升沉量。整体而言,深V复合船型的纵摇响应明显小于圆舭船型,升沉响应略小于圆舭船型。这表明加装半潜体后的深V复合船型具有较好的耐波性能,特别是当1.0≤λ/L≤1.4时,其具有明显的纵摇稳定性。从3个航速下的试验波长范围看出,在24 kn航速下λ/L=1.1时升沉的减摇效果高达9.98%,在24 kn航速下λ/L=1.2时纵摇的减摇效果高达12.46%。 图10 纵摇响应RAO 图11 升沉响应RAO 此外,模型试验所测量的各工况下两种船型的波浪增阻如图12所示。可以看出,深V复合船型的波浪增阻峰值普遍比圆舭船型大。而在24 kn航速下1.0≤λ/L≤1.2时,深V复合船型的波浪增阻稍比圆舭船型小。 为简化起见,本文选取2种船型在实船航速18 kn、波长船长比为1.1时迎浪航行的运动响应的CFD数值计算与水池模型试验结果进行对比。2种船型的纵摇和重心升沉时历曲线对比如图13和14所示。可以看出,计算结果与试验结果的吻合程度较好,计算误差在10%以内,证明了采用STAR-CCM+计算船舶在波浪中的运动响应的准确性。 图15所示为基于CFD模拟和试验测试的圆舭船型艏艉局部波形对比图。可以看出,CFD模拟的圆舭船型产生的肩波、鸡尾流均与试验波形相对应。总之,水池模型试验和CFD计算的波形具有较好的相似度。图16所示为2种船型在实船航速18 kn、波长船长比为1.1迎浪航行时的自由面波形对比。当船舶穿过波浪时,深V复合船型后方的兴波较高,波浪增阻普遍较大。 图12 波浪增阻RAO 图13 圆舭船型运动时历曲线 (Fn=0.233) 图14 深V船型运动时历曲线 (Fn=0.233) 图15 CFD模拟和模型试验所得的船艏艉处局部波形对比 图16 2种船型在波浪中的波形图(Fn=0.233) 1)深V船型的横摇稳定性明显优于圆舭船型,加装半潜艏的深V复合船型纵向稳定性也明显优于圆舭船型; 2)基于Realizablek-ε湍流模型和VOF造波的重叠网格CFD模拟方法,所计算的船舶静水阻力和规则波中的运动性能与试验结果吻合良好,验证了该CFD数值模型预报加装减摇附体深V船型水动力性能的有效性和准确性; 3)本文优化设计的深V复合船型的静水阻力比母船型圆舭船型小,但波浪增阻峰值普遍比圆舭船型大,在24 kn航速1.0≤λ/L≤1.2时,深V复合船型的波浪增阻稍比圆舭船型小,其耐波性能尤其是纵摇稳定性得到明显改善,其垂荡和纵摇最大分别减小9.98%和12.46%,明显提高了船舶的综合航行性能。


2 水池模型试验建立

3 结果对比分析
3.1 横摇衰减特性分析

3.2 静水阻力分析


3.3 规则波中运动响应分析





4 结论
