驰振和基振复合作用下的双稳态能量采集系统动力学分析
2021-02-25董博见李海涛
董博见,徐 鹏,李海涛,2
(1.中北大学 理学院,山西 太原 030051;2.上海大学 上海市应用数学和力学研究所,上海 200072)
0 引 言
随着微电子加工技术的发展,微电子设备的供能问题引起广泛关注.在自然环境中,风等流体的动能具有容易获取、清洁环保和功率密度高等突出优势,微电子设备低能耗、低功率的特点为利用流体动能替代传统电池提供了可能[1].
外流诱发的结构自激振动形式包括驰振、涡激振动和颤振等,其中驰振表现为气动弹性的不稳定性,它将引起大幅极限环振动.目前,驰振能量采集器的经典模型为压电式悬臂梁外接方形钝头体结构,驰振能量将通过压电效应等特定的能量转换机制转化为电能.Zhao等[2]建立了一个方形钝头体的悬臂梁结构,研究了负载电阻、迎风面积、钝头体质量以及切入风速对能量采集效率的影响.练继建和赵道利等[3-4]研究了不同来流角度和钝体形状下系统的响应特性,为后续的发电振子截面优化提供了有利参考.Qin等[5]提出一种由两个方形钝头体和一个圆柱形钝头体组成的新型风能采集系统,该系统综合了涡激振动和驰振两种流致振动机理,提高了能量转化效率.
上述关于驰振能量采集的研究只考虑了风载作用,然而在实际环境中,例如交通繁忙的桥梁、地铁、船舶以及海面浮标等,能量采集结构受到基础激励和风载的共同作用.若能将风能和基础振动两种冗余的激励能量同时回收利用,可有效地解决传感器和其他低功率元件的自供能问题[6-8].对于驰振和基础振动复合作用下的系统,工作频带较窄和输出电压响应较低是困扰研究者的两大难题.Zhao等[9-10]通过引入碰撞分段线性来增大共振区域频带,提高了基础振动和驰振共同作用下系统的能量采集效率.
近年来,通过引入磁力耦合非线性使系统呈现多稳态被用于拓宽振动能量采集系统的有效工作频带,其中双稳态因其结构简单、容易实现被广泛采用.孙舒等[11]研究了压电悬臂梁双稳态能量采集系统的建模和分析方法,获得了不同激励频率、幅值以及磁铁间距对输出功率的影响规律.Li等[12]提出了一种改进的压电能量采集装置,将传统双稳态能量采集系统的外磁铁支撑方式改为动态耦合,通过数值模拟验证了该系统的优越性.曹东兴等[13]基于流致振动理论,设计了一种磁力耦合非线性涡激振动能量采集器,并通过理论和实验验证了其宽频能量采集效果.Zhou等[14]提出了一种带有Y型弯曲翼的双稳态能量采集系统,在较低风速条件下实现了两个平衡位置之间的连续跳跃以及较宽风速范围的相干共振.
以上关于磁力耦合实现宽频能量收集的研究尚未延伸至同时考虑基础振动与流致振动的情况.而在实际环境中,例如吊桥、地铁、高层楼宇等都包含这两种激励的耦合作用,且需要一种稳定的自供能设备为结构健康检测提供能源.为了提高环境激励的利用效率,本文将磁力耦合非线性应用到驰振和基础振动共同作用的能量采集系统,建立双稳态能量采集系统的分布参数动力学模型,通过数值方法验证宽频、高效的能量采集效果.
1 工作原理
本文考虑了一种基于驰振和基础振动的新型能量采集系统,这种磁力耦合的双稳态能量采集系统示意图如图1所示.在长度为l的悬臂梁自由端附着一个D型钝头体,压电片粘贴在悬臂梁的根部两侧.在D型钝头体后的悬臂梁上固定永磁体A;在T型基座上固定永磁体B、C.
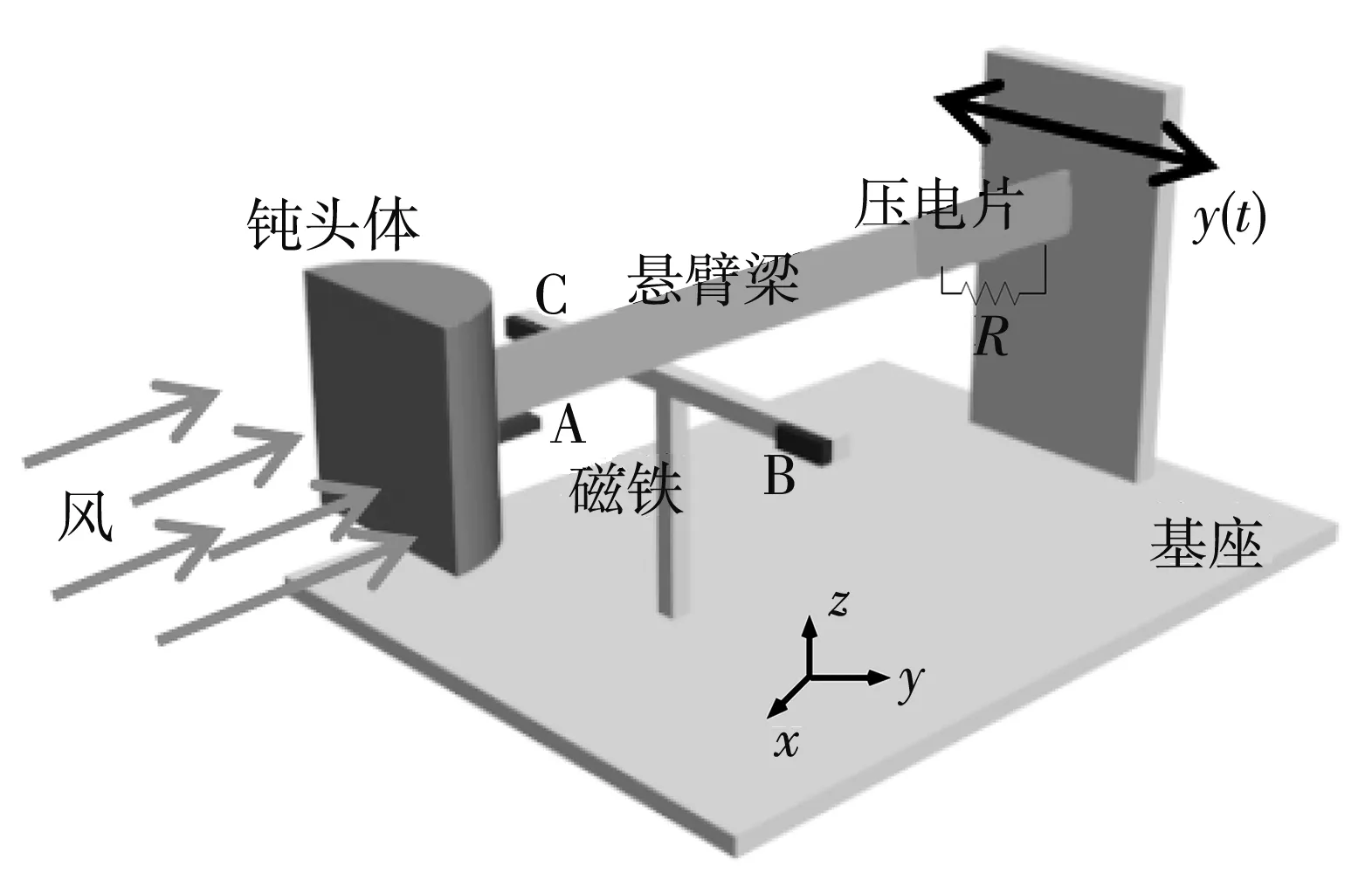
图1 驰振和基础振动复合作用下的磁致双稳态能量采集装置Fig.1 Schematic of a magnetic-induced bistable energy harvester under galloping and base vibration
悬臂梁在风载以及基础振动y(t)作用下产生横向振动,在结构振动中产生的应变能通过长度为lp的压电片转化为电能.
2 动力学模型的建立
为了研究能量采集系统的动态响应,采用能量法建立系统的分布参数模型.
以悬臂梁根部的中心位置为原点构建坐标系,沿悬臂梁轴向为x轴,垂直于轴向为y轴,只考虑轴向应变,忽略其他方向的应变.系统的动能表示为

(1)
式中:w为压电悬臂梁的挠度;“·”表示对时间t的微分;ρb,ρp,Ab,Ap和ME分别为悬臂梁的密度、压电片的密度、悬臂梁的横截面面积、压电片的横截面面积、悬臂梁末端钝头体以及磁体的总质量.
对于双稳态能量采集系统,其势能主要包括压电梁的弹性势能、因压电效应产生的电能和磁铁间的磁势能.压电悬臂梁的弹性势能表示为

(2)
式中:Tb和Sb分别为x方向上悬臂梁的轴向应力和轴向应变;T1和S1分别为两片压电片在x方向上的轴向应力和轴向应变.
根据压电材料的本构关系,压电片的轴向应力T1和沿y方向的电位移D3可表示为[15]

(3)


(4)
式中:“ ′ ”表示对x的微分;Yb为悬臂梁的弹性模量;Ib为悬臂梁相对中心轴的截面惯性矩;Ip为压电层相对中心轴的截面惯性矩;hb和hp分别为悬臂梁和压电片的厚度.
压电片发生形变后,因压电效应而产生的电能为

(5)



图2 磁偶极子模型Fig.2 Geometric diagram of magnetic dipoles
磁偶极矩依赖于磁铁的体积,表示为μ=HiVm.考虑磁铁A与B、C 之间的磁极相互吸引,基于正交分解,磁铁A、B和C的磁偶极矩分别表示为

(6)

磁偶极子B和C作用在磁偶极子A上的磁场分别表示为

(7)
式中:μ0=4π×10-7H/m为真空磁导率;|·|2和分别表示二范式和梯度算子.根据几何关系,从磁铁B到磁铁A的向量rBA和从磁铁C到磁铁A的向量rCA分别表示为

(8)
磁场的势能为[11]
Um=-μABBA-μABCA=
(9)

基于双稳态能量采集系统的动能和势能,将q和U作为广义坐标得到系统的Lagrange方程

(10)


(11)


(12)
式中:ρa为空气密度;Aa为钝头体迎风面积;v为风速;ai为经验空气动力系数.

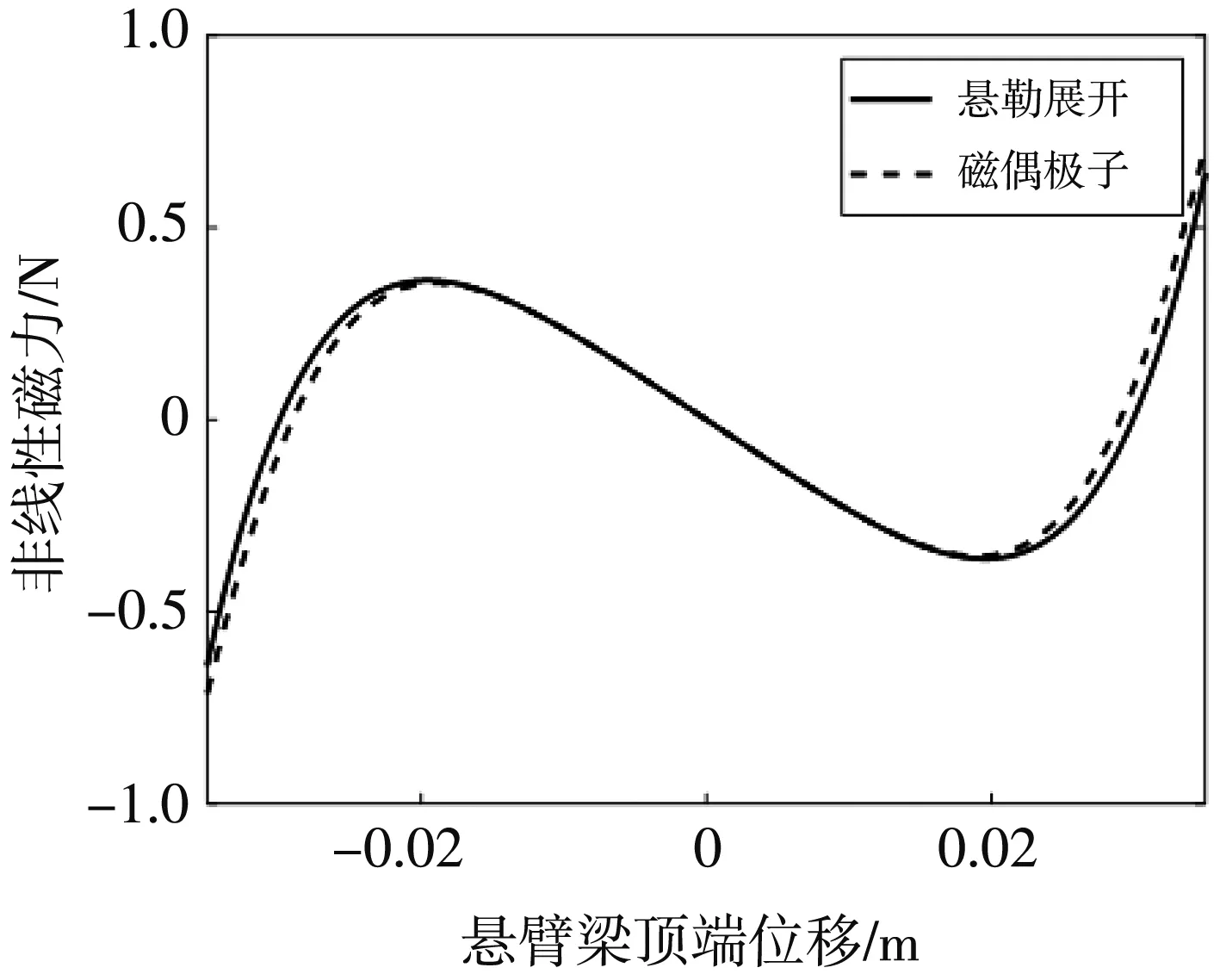
Fm(q(t))=K1q(t)+K2q(t)3+K3q(t)5+
O(q(t)5).
(13)
如图3所示,磁偶极子的磁力模型和5阶麦克劳林级数近似模型的结果接近,因此,驰振和基础激励共同作用下双稳态能量采集系统的非线性机电耦合振动控制方程可写为

(14)
3 数值模拟
针对驰振和基础振动作用下双稳态能量采集系统进行数值模拟,系统结构参数如表1所示.如图3(b)所示,在该结构参数下双稳态系统的势能垒较低,因此在模拟中仅考虑阱间振动的动力学行为.
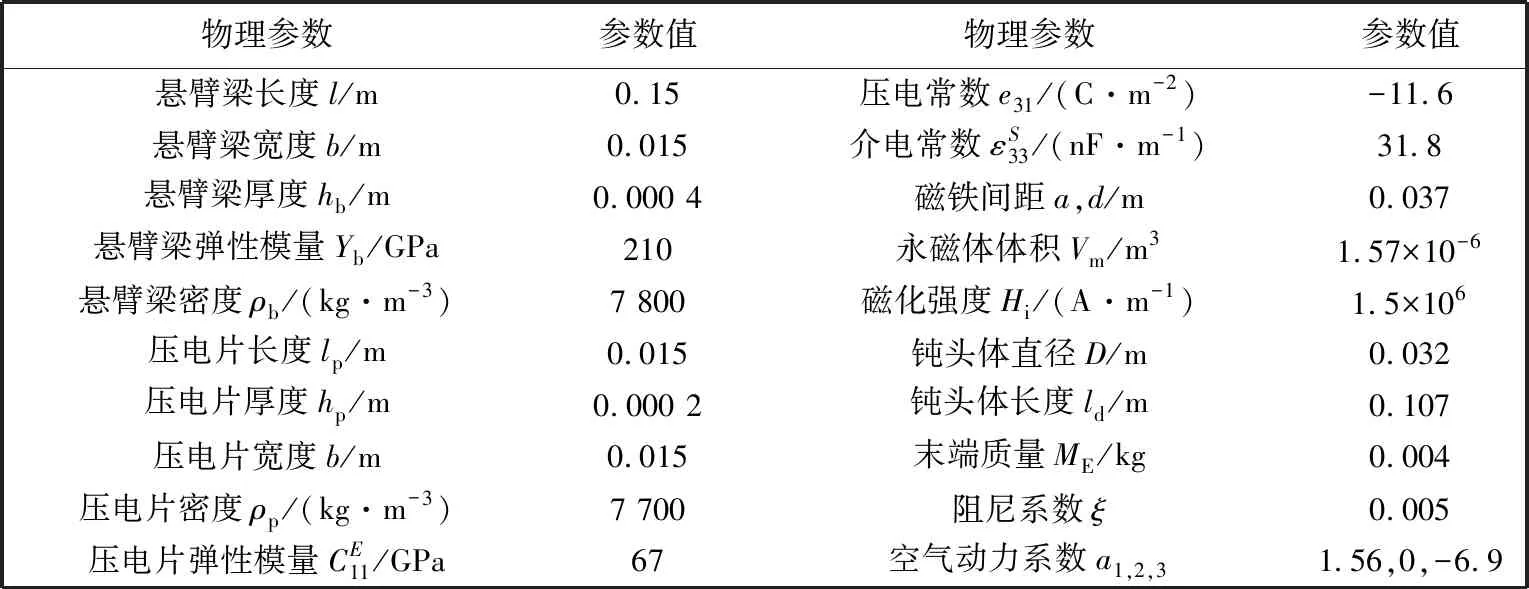
表1 双稳态能量采集系统模型参数Tab.1 Parameters of bistable energy harvester system
为了突出在驰振和基础振动作用下双稳态能量采集器相对线性刚度能量采集器的优势,图4给出了通过变步长Runge-Kutta方法得到的两种系统的RMS电压响应.图 5~图8为非线性动力学特性,给出了包括位移、电压的时间历程、带有庞加莱截面的相图和电压的功率谱密度.
如图4所示,根据系统RMS电压随频率的变化趋势将系统在不同频带下的响应特性划分为3个区域R1、R2和R3,从图中可以看出,区域R1和R3的响应对基础振动频率变化不敏感,而在R2区域基础振动激励的作用较为明显.数值频域结果表明:线性刚度系统的响应特性与文献[9-10]中以及图4中的解析结果一致.本文所提出的双稳态系统在R1和R3区域内有更高的RMS电压响应(13.5%),输出功率增大了28.45%;线性刚度系统仅在R2区域内的固有频率处存在高峰值的共振响应,而双稳态系统在相应的区域有较高的峰值和较宽的频带.
为了详细讨论图4中的数值频域结果,图 5~图7分别在线性刚度系统和双稳态系统的3个区域中选择了一些具有代表性的点(Li和Ni(i=1,…,6))进行对比分析.
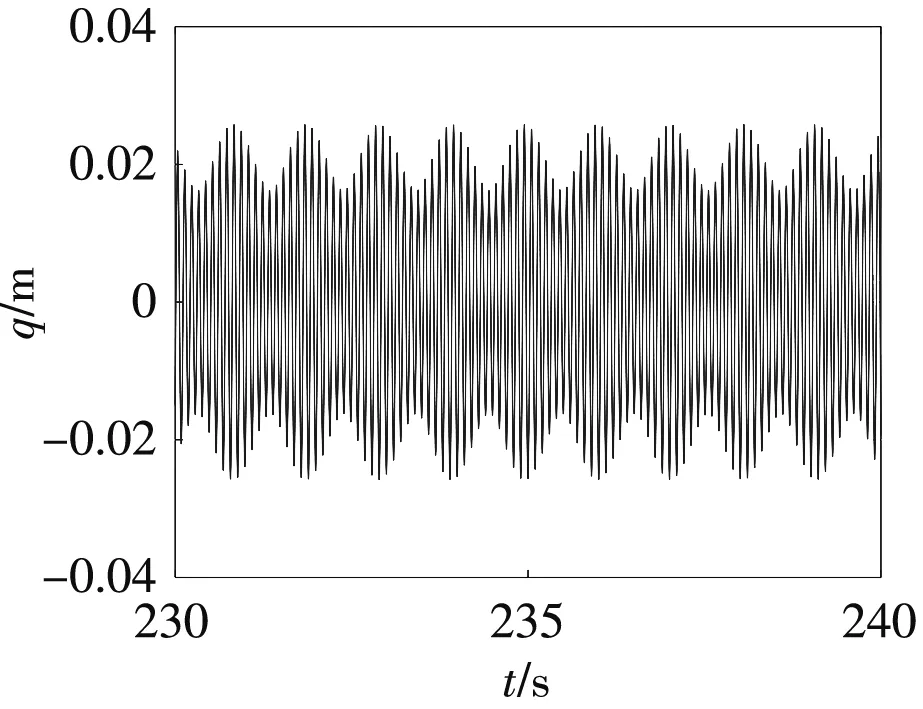
图 5(a)为在L1处(ωb=9 Hz)的线性刚度系统位移和电压的稳态时域响应,由于驰振和基础激励的频率接近,位移和电压时域响应在调制频率下表现为锯齿状波形,此时带有庞加莱截面的相图中存在由若干个离散点构成的闭环,表明系统的响应呈现拟周期特性.从电压的功率谱密度中可以看到系统在ωb和ωg处存在两个较大的峰以及在3ωg处存在一些较小的峰.如图 5(b) 所示,双稳态系统在R1区域中的N1处(ωb=6 Hz),位移和电压的稳态时域响应以及对应的相图都表现为双稳态的拟周期特性.相比线性刚度系统,非线性双稳态系统的位移响应幅值、电压响应幅值以及它们的密集程度都较高,因此在电压功率谱密度的高频部分出现更多峰值.
(a) 非线性磁力

(a) 线性刚度系统
(a) L1点

(a) L2点

(a) L3点
对于线性刚度系统,当激励偏离共振频率时响应幅值会急剧下降,因此区域R2相对较窄.如图 6(a),在L2处(ωb=10 Hz)的功率谱密度上可以看出系统的大幅响应在频域上只存在ωb和3ωb两个峰,由此可见在R2区域中基础激励的影响起主导作用.如图 6(b) 所示,双稳态系统的庞加莱截面为单一重合的点,表明在R2区域中表现为双阱的周期特性.在N2处(ωb=10.8 Hz)的电压功率谱上出现ωb和3ωb两个较大的峰,以及一些由于非线性刚度引起非整数周期的倍频成分.相比线性刚度系统,双稳态系统拓宽了共振区域R2的范围,使系统在更宽的频域范围上有大幅的输出响应.
图 7(a) 为线性刚度系统在R2区域与R3区域临界处L3点(ωb=10.3 Hz)的响应.由于ωb和ωg两个激励频率接近,叠加后的波形强弱随时间作周期性变化,其位移和电压的稳态时域响应出现明显的拍振现象.当基础激励频率增加到12Hz 时(如图 7(c)),由于ωb远大于ωg导致系统响应的高频成分愈加明显,因此拍振现象减弱.图7(b),(d)为双稳态系统在R2区域与R3区域临界处N3点(ωb=10.8 Hz)以及R4区域N4点(ωb=12 Hz)的响应,可以看到双稳态系统位移和电压的稳态时域响应以及对应的相图都呈现出拟周期特性,其位移和电压的稳态响应幅值均高于线性刚度系统.值得注意的是,由于在L4和N4点电压的功率谱中驰振频率的峰值均高于基振频率的峰值,表明在该区域中系统更多得从风能引起的驰振现象中收集能量.

(a) N5点
如图8所示,即使外部激励条件相同,双稳态系统在共振区域R2内仍存在高能大幅周期响应和低能拟周期响应的差异.高能轨道与低能轨道的差异性主要依赖于初始位移、速度和电压等初始条件(数值模拟中N5处响应的初始位移设定为0.05 m,而N6处响应的初始位移设定为0m).当基础激励频率设定为ωb=10 Hz,双稳态系统在R2区域中的N5处呈现高能轨道,而在N6处呈现能量较低的拟周期轨道.与N5处高能轨道上的周期性相比,N6处稳态时的位移和电压响应都呈现强弱周期变化的锯齿波形,具有多个频率成分.
4 结 论
本文提出了一种驰振和基础激励共同作用下的双稳态压电能量采集系统.首先利用能量法、欧拉-伯努利梁理论和准稳态气动载荷假设,建立了驰振和基础激励复合作用的双稳态能量采集系统动力学模型.在此基础上通过数值方法揭示了能量采集系统的非线性动力学特性,结果表明:
1) 相比线性刚度系统,非线性双稳态系统在远离共振区域的输出电压增大了13.5% ,输出功率增大了28.45%,大幅周期响应的频带拓宽了2.23 Hz,提高了能量采集效率.
2) 数值结果表明在远离共振频带内系统表现拟周期响应,电压的功率谱中包含基础振动和驰振的复合成分;而共振区域内的高能解呈现大幅周期现象,此时系统响应中基础激励起主导作用.
3) 在共振区域内出现高能的大幅周期响应和低能的拟周期响应共存的非线性动力学特性,该现象的产生主要依赖于初始位移、速度和电压等初始条件,因此,下一步可结合改变初值控制方法实现调控高能轨道.