具有无穷多共存类吸引子的保守混沌系统同步控制
2021-02-24颜闽秀林建峰谢俊红
颜闽秀,林建峰,谢俊红
1.沈阳化工大学信息工程学院,辽宁 沈阳 110142
2.工业环境⁃资源协同控制与优化技术重点实验室,辽宁 沈阳 110142
混沌现象是非线性动力学系统中的一种特有的运动形式,是当前科学及工程领域关注的前沿课题[1]。 Lorenz[2]系统的提出,就此拉开了混沌学的序幕。之后混沌的理论研究与工程应用得到了飞速发展。不同类型的混沌系统不断地被发现,如Chen系统[3]、Liu 系统[4],而后超混沌系统[5-6]、多翼混沌系统[7]也相继被提出,不难发现这些系统大多数都是耗散混沌系统。
耗散混沌系统是指Lyapunov指数之和为负的混沌系统,而Lyapunov指数之和为零的混沌系统则称为保守混沌系统,广泛地应用于经典力学、天体力学及航空科学中,是非线性科学领域的一个很重要的研究方向[8-9]。 耗散混沌系统具有吸引子,容易被重构。保守系统不具有吸引子,但它也拥有耗散混沌系统的一般性质,它处于混沌状态时的运动轨迹称为类混沌吸引子,这并非一般意义上的吸引子,很难被重构。因此,若将保守混沌系统应用于同步通信中会具有更高的安全性。
共存(类)吸引子是非线性动力学系统中一个特殊又有趣的现象,指一个参数固定的混沌系统的初始条件发生改变,可以产生其他的独立吸引子,反映了初始条件对系统最终演化状态的影响[10-11]。具有共存(类)混沌吸引子的系统,其动态行为更加复杂,在同步通信等工程领域中具有重要的应用价值。随着5G通信的快速发展,混沌理论与通信技术的结合,也成为当下学术界关注的焦点[12]。
混沌同步控制一直是混沌理论领域的一个重要方向,是近些年主要兴起的新的科学研究方向,实际应用中的很多领域都有涉及,在同步通信中也得到了广泛的应用。为了同步混沌系统,研究人员成功提出了各种控制方案,如PID同步控制[13]、反馈同步控 制[14]、主 动 同 步 控 制[15]、观 测 器 同 步 控制[16-17]、投影同步控制[18]、滑模同步控制[19]、自适应同步控制[20-23]和鲁棒同步控制[24]等。
而复杂的混沌系统会增加同步控制器设计的难度,因此有必要找到一种能够产生复杂吸引子的简单混沌系统。
本文在Sprott⁃A系统[25]的基础上改变其参数,得到一个三维保守混沌系统,受文献[26-27]启发,引入正弦函数,进行正弦项变换,得到的系统具有无穷多的共存类混沌吸引子,文献[26]和[27]只含有一个正弦项,只能沿着某一坐标轴产生共存吸引子,本文提出的系统具有两个正弦项,可以分别以及同时沿着两个坐标轴产生共存吸引子。具有更复杂的动态行为,应用在同步通信中将具有更高的安全性和实用价值。
1 新混沌系统模型及特性分析
1.1 新混沌系统模型
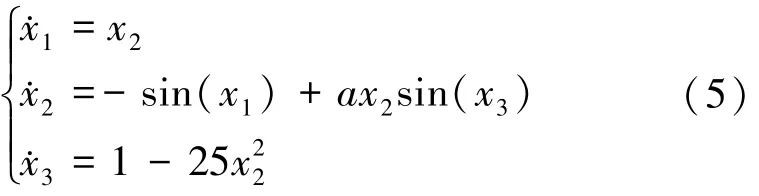
受 Sprott⁃A 系统[25]影响,得到一个三维保守混沌系统,其数学模型为
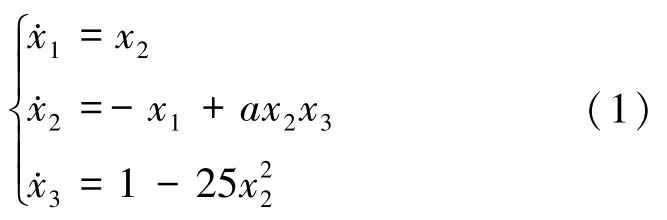
式中,x1,x2,x3为系统的状态参量,a为控制参数。根据李雅普诺夫指数模拟得到:a=25时出现混沌吸引子。下面利用MATLAB,在给定初始值(0.1,0.1,0.1) 及a=25的条件下,绘制系统的x1-x2-x3类吸引子图(保守混沌系统处于混沌状态时的运动轨迹称为类混沌吸引子)及x2-x3相图,分别如图1和图2所示。
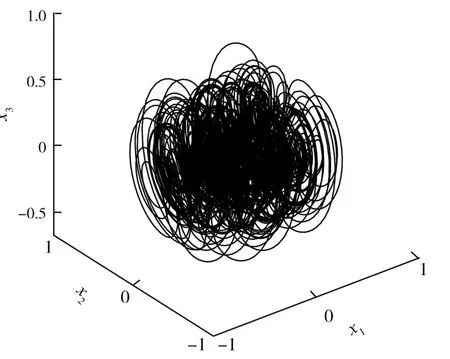
图1 x1-x2-x3类混沌吸引子图
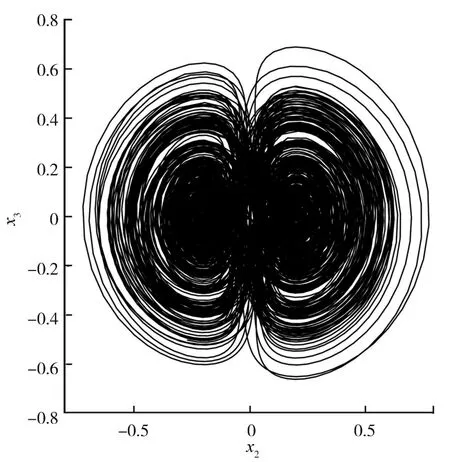
图2 x2-x3相图
1.2 系统的耗散性
系统(1)的梯度,即能量函数∇V为

式(2)表明,∇V的符号与a和x3有关,由∇V难以直接判断系统(1)是耗散的或保守的,通过李雅普诺夫指数之和进行判断(一个混沌系统的∇V为0或李雅普诺夫指数之和为0,则该系统为保守混沌系统)。
1.3 李雅普诺夫指数及之和图
为进一步验证系统为保守混沌系统,下面绘制系统的李雅普诺夫指数及之和图。
在初始值为(0.1,0.1,0.1)及a=25的条件下,求得李雅普诺夫指数λL1=0.03,λL2=0,λL3=-0.03。系统的李雅普诺夫指数及之和图分别如图3和图4所示。
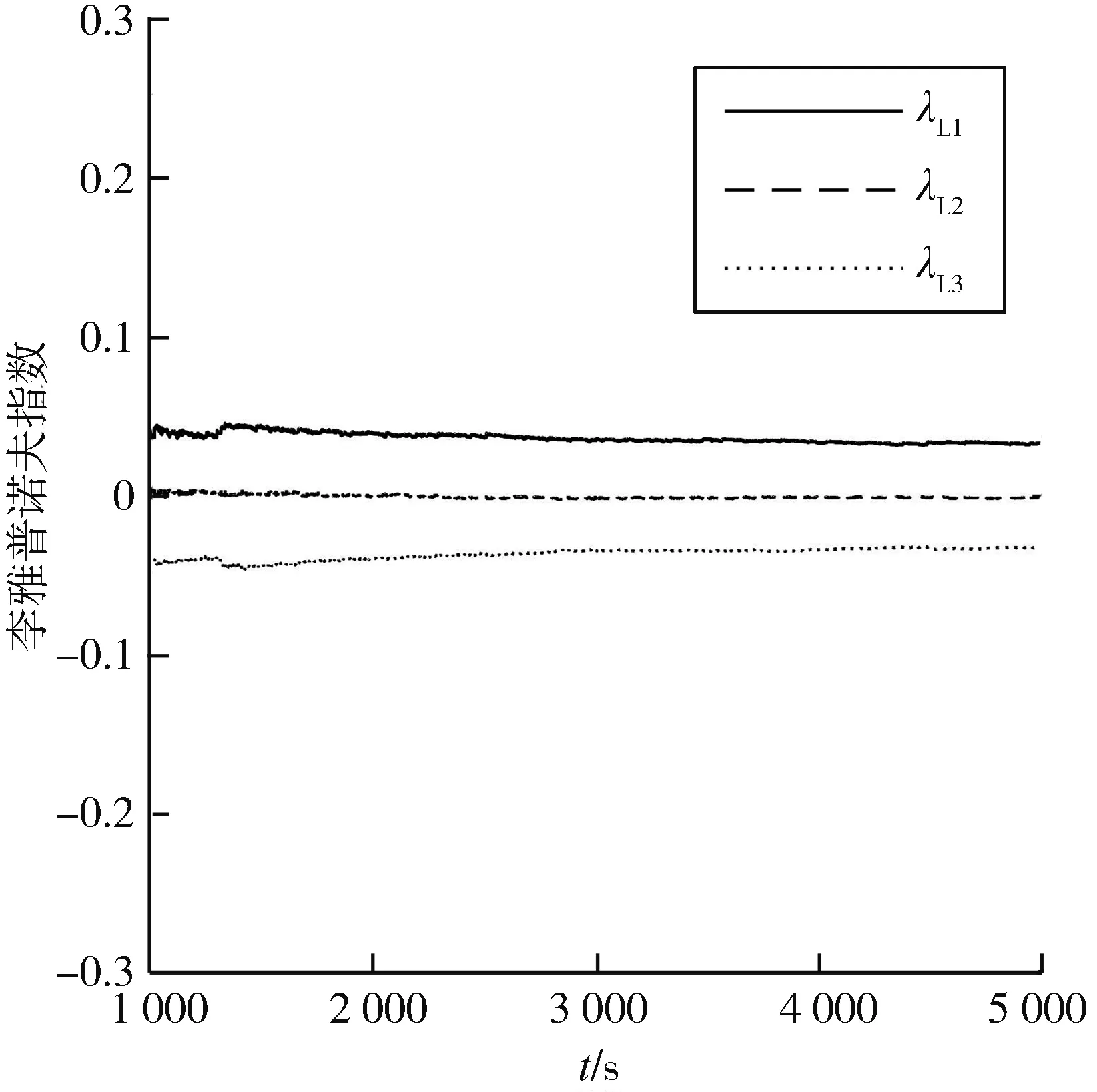
图3 李雅普诺夫指数图(1)
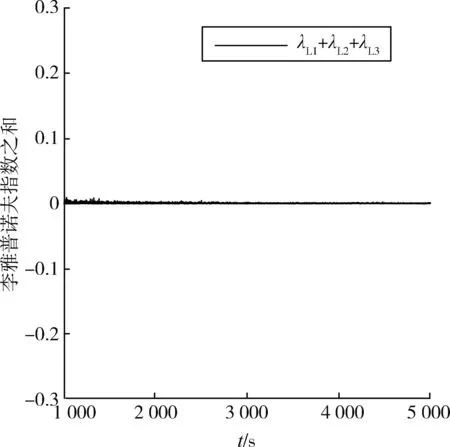
图4 李雅普诺夫指数之和图(1)
由于系统(1)的最大李雅普诺夫指数大于0,且有一个为 0,另外一个小于 0,符合(+,0,-)形式,表明系统是混沌的,且李雅普诺夫指数之和图是一条为0的直线,因此系统(1)为保守混沌系统。
2 新系统的正弦项变换及分析
2.1 正弦项变换
受文献[26-27]启发,对1.1节的系统也引入正弦函数,把系统(1)做如下变换

可以得到变换后的系统为
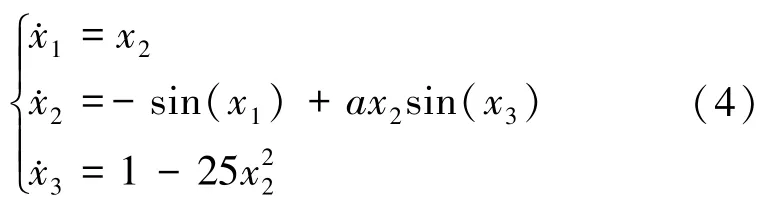
下面绘制系统(4)的李雅普诺夫指数及之和图。在初始值为(0.1,0.1,0.1)及a=25的条件下,求得李雅普诺夫指数λL1=0.03,λL2=0,λL3=-0.03。系统的李雅普诺夫指数及之和图分别如图5和图6所示。
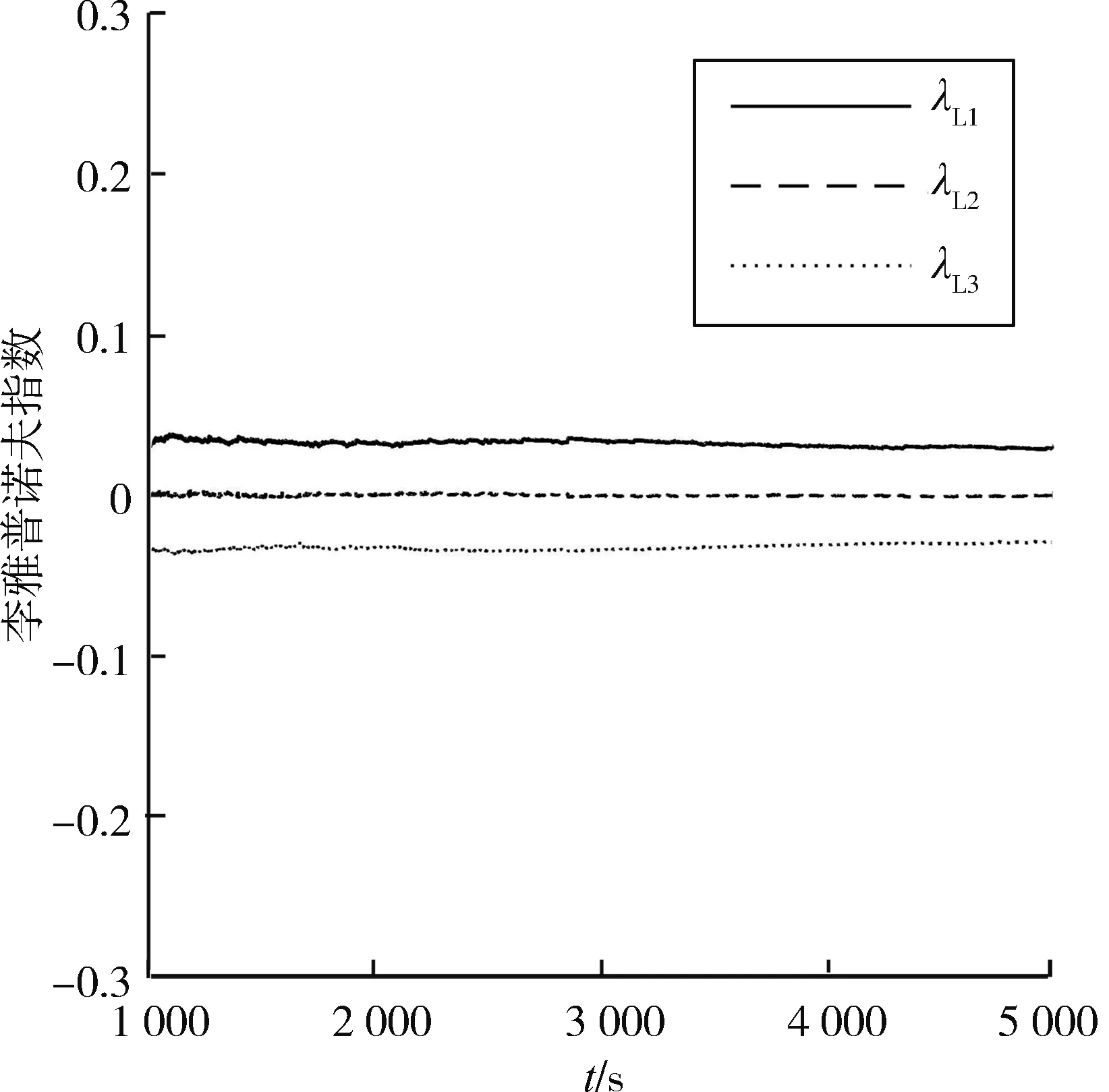
图5 李雅普诺夫指数图(2)
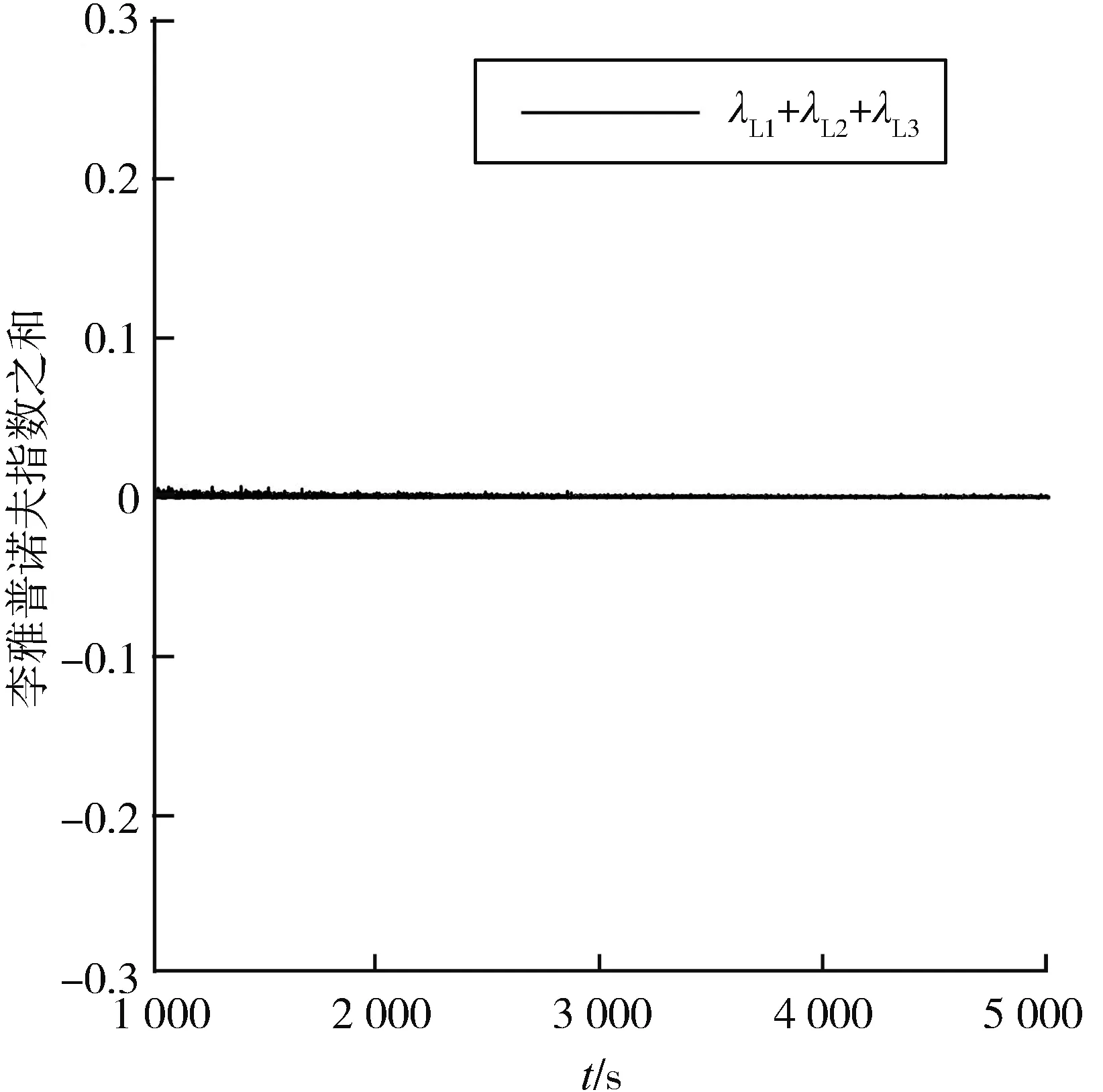
图6 李雅普诺夫指数之和图(2)
由1.3节可知,变换后的系统(4)也为保守混沌系统。
2.2 对参数a变化的分析
令a∈[24,26],系统的李雅普诺夫指数及之和图分别如图7和图8所示。
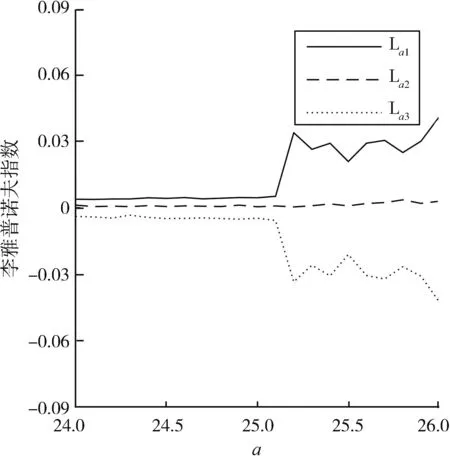
图7 李雅普诺夫指数图(3)
由图7、8可以看出,参数a变化时,李雅普诺夫指数符合(+,0,-)形式,表明系统是混沌的,且李雅普诺夫指数之和图是一条为0的直线,因此系统(4)在参数a∈[24,26]时为保守混沌系统。
2.3 类混沌吸引子分别沿x1轴和x3轴共存
利用 MATLAB,给定初始值 (0.1+2kπ,0.1,0.1) 和 (0.1,0.1,0.1+2kπ) 及a= 25 的条件下(k= 0,1,2),绘制系统的x1-x2-x3类吸引子图(保守混沌系统处于混沌状态时的运动轨迹称为类混沌吸引子)分别如图9和图10所示。
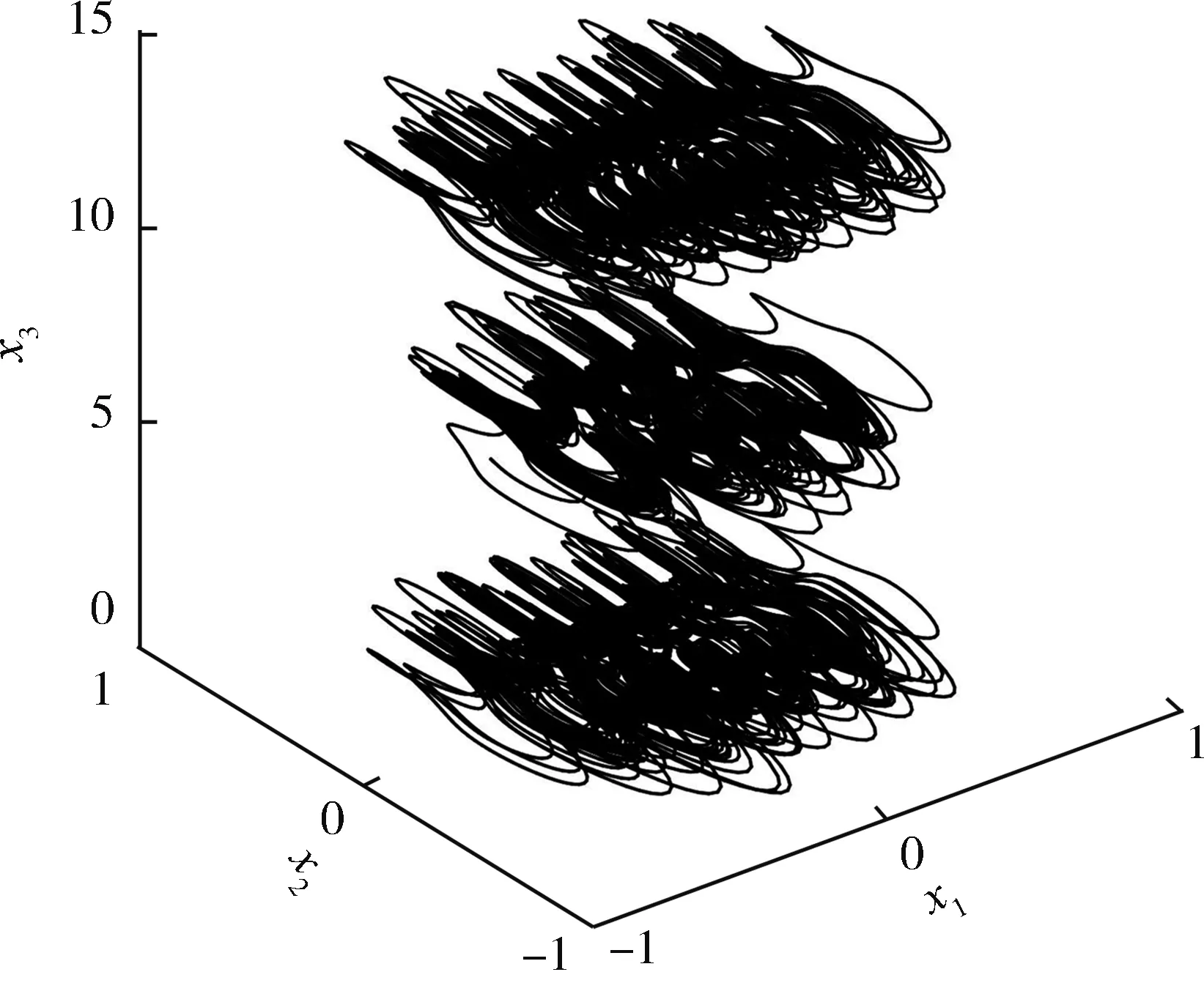
图10 沿x3轴共存的类混沌吸引子图
2.4 类混沌吸引子同时沿x1轴和x3轴共存
在初始值为 (0.1+2kπ,0.1,0.1+2kπ) 及a=25的条件下,利用MATLAB工具绘图,绘制系统的x1-x2-x3类吸引子图分别如图11和图12所示。
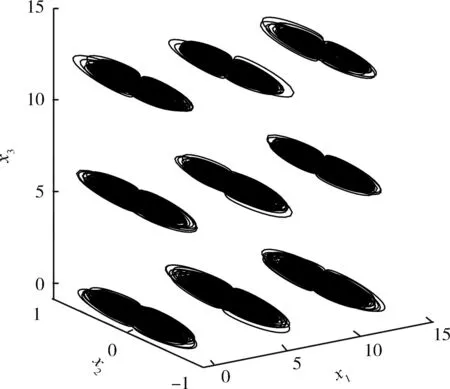
图11 同时沿x1轴和x3轴共存的类吸引子图(k=0,1,2)
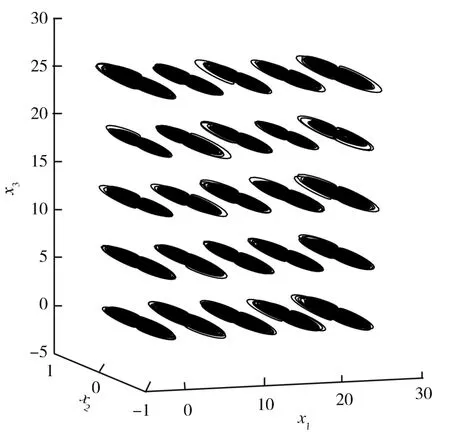
图12 同时沿x1轴和x3轴共存的类吸引子图(k=0,1,2,3,4)
由图 11 和图 12 可以发现,当k=0,1,2,3,…,n时,可以得到(n+1)×(n+1)个共存吸引子,即具有无穷多个共存类混沌吸引子。
3 新系统的同步和仿真
以本文变换后的三维系统为驱动系统,有
响应系统设计为
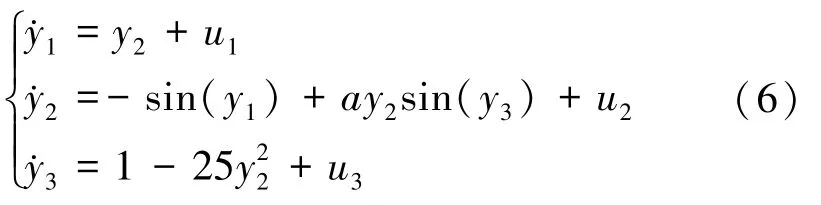
式中,u1、u2、u3为系统的同步控制器。
3.1 误差系统的设计
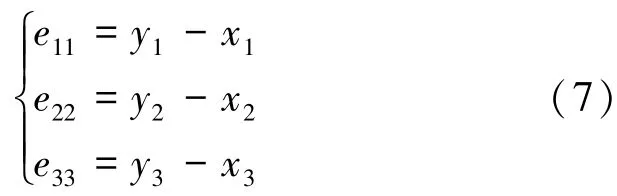
受文献[28]启发,设计了一种多通道误差系统:eij=yi-xj,其中i,j=1,2,3。 对于三维的系统,xj和yi(i,j=1,2,3)由排列组合的知识可知,组成相应的误差系统会有种形式,即6个通道。
第一种情况:i和j完全相等,即通常意义上构造的误差系统
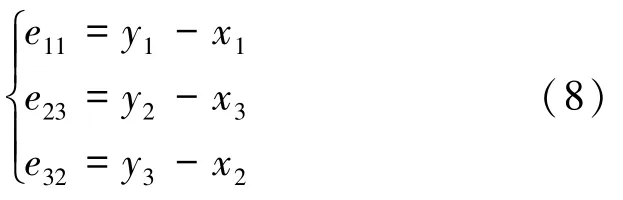
第二种情况:i和j不完全相等,构造的误差系统分别如式(8)~(10)所示。
第三种情况:i和j完全不相等,构造的误差系统分别如式(11)、(12)所示。
3.2 同步控制器设计
选取其中的两个通道进行验证,在第二种情况和第三种情况中,分别选取一个通道进行验证,选取误差系统式(9)和误差系统式(12)进行验证,并命名式(9)为通道 1,式(12)为通道 2。
3.2.1 通道1的同步控制器设计
根据式(9),计算误差系统为
设计同步控制器为
接着定义参数估计误差为

求导得

把参数估计误差(16)代入误差方程(15)中,可以得到
构造李雅普诺夫函数

对式(19)求导可得

把式(17)、(18)代入式(20)可得

将(22)代入到(21),可得

由式(19)和式(23)再根据李雅普诺夫渐近稳定理论,可以得知系统V是渐近稳定的,由渐近稳定的定义可以得知误差系统趋于 0,则表明了在式(9)构造的误差系统下,响应系统(6)和驱动系统(5)达到同步。
3.2.2 通道2的同步控制器设计
同理根据式(12),可以计算误差系统为
同步控制器设计为

把设计的控制器(25)代入误差系统(24)中,可以得到新的误差系统方程为
接着定义参数估计误差为

求导得

把参数估计误差(27)代入误差方程(26)中,可以得到
构造李雅普诺夫函数

对式(30)求导可得

把式(28)、(29)代入式(31)可得到


将(33)代入(32),可以得到

由3.2.1节可知,在式(12)构造的误差系统下,响应系统(6)和驱动系统(5)也可以达到同步。
3.3 仿真与分析
3.3.1 通道1的仿真
通过MATLAB对通道1进行仿真,选取系统的初始参数为a=25,增益常数ki=5(i=1,2,3), 驱动系统(5)的初始值为(0.1,0.1,0.1),响应系统(6)的初始值为(0.2,0.3,-0.1),运行结果如图 13所示。
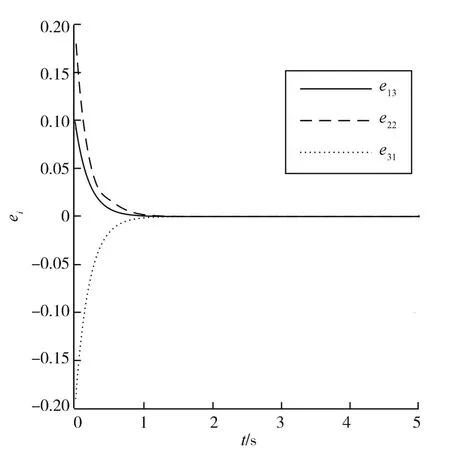
图13 参数a=25的误差曲线图(1)
从图13中可以看出,误差变量在极短时间内趋于零,说明响应系统和驱动系统达到了同步。
考虑参数波动的影响,下面选取参数a=24和26(其余条件不变)继续进行仿真,运行结果分别如图14和15所示。

图14 参数a=24的误差曲线图(1)

图15 参数a=26的误差曲线图(1)
从图14、15可以看出,随着参数的改变(此时仍为混沌状态),同步效果与图13基本一致,说明参数变动后,响应系统和驱动系统也可以很快达到同步,证实了通道1同步的有效性。
3.3.2 通道2的仿真
通过MATLAB对通道2进行仿真,选取系统的初始参数为a=25,增益常数ki=5(i=1,2,3) ,驱动系统(5)的初始值为(0.1,0.1,0.1),响应系统(6)的初始值为(0.2,0.3,-0.1),运行结果如图 16 所示。
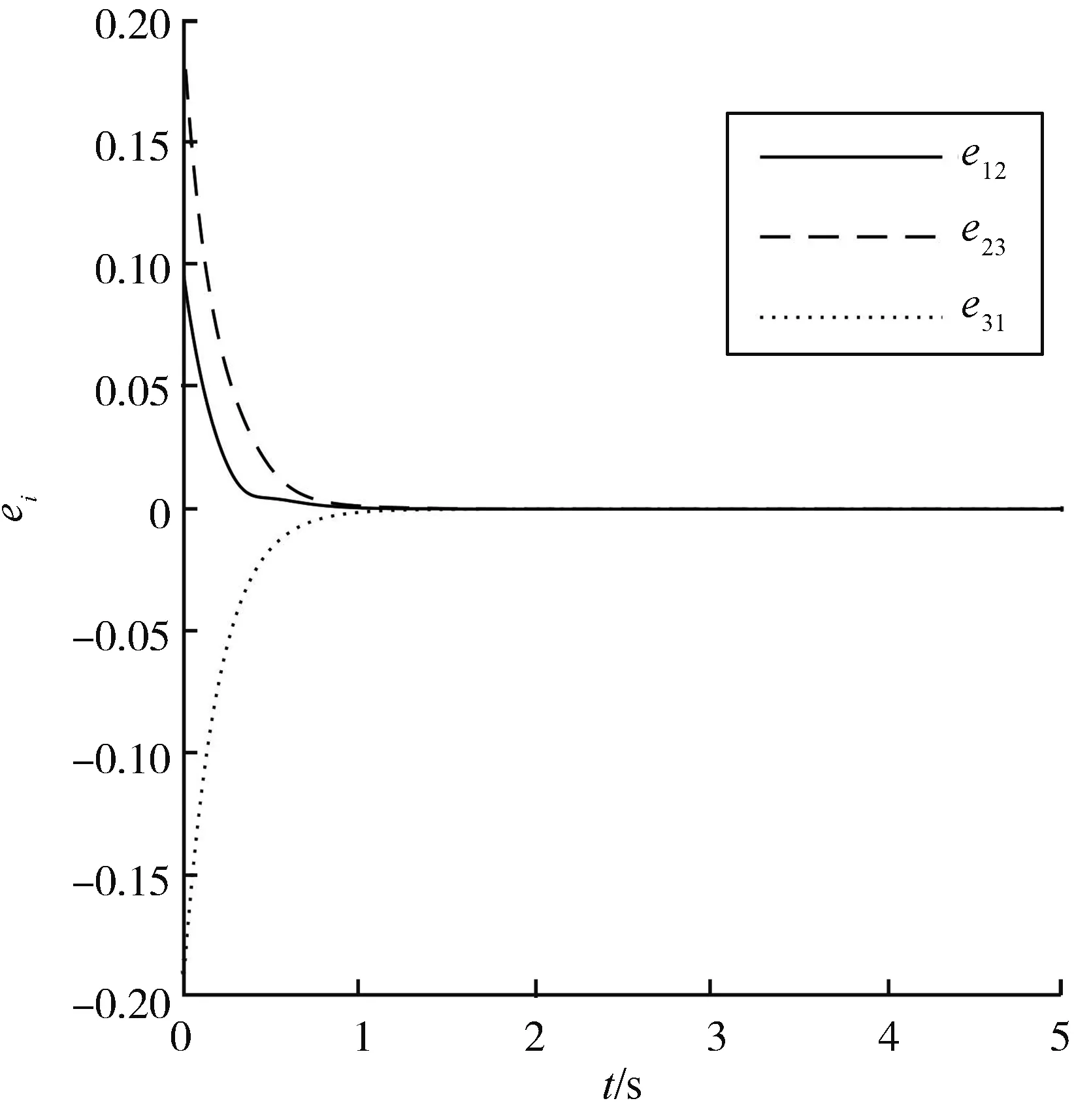
图16 参数a=25的误差曲线图(2)
从图16中可以看出,误差变量在极短时间内趋于零,说明响应系统和驱动系统达到了同步。
考虑参数波动的影响,下面选取参数a=24和26(其余条件不变)继续进行仿真,运行结果分别如图17、18所示。
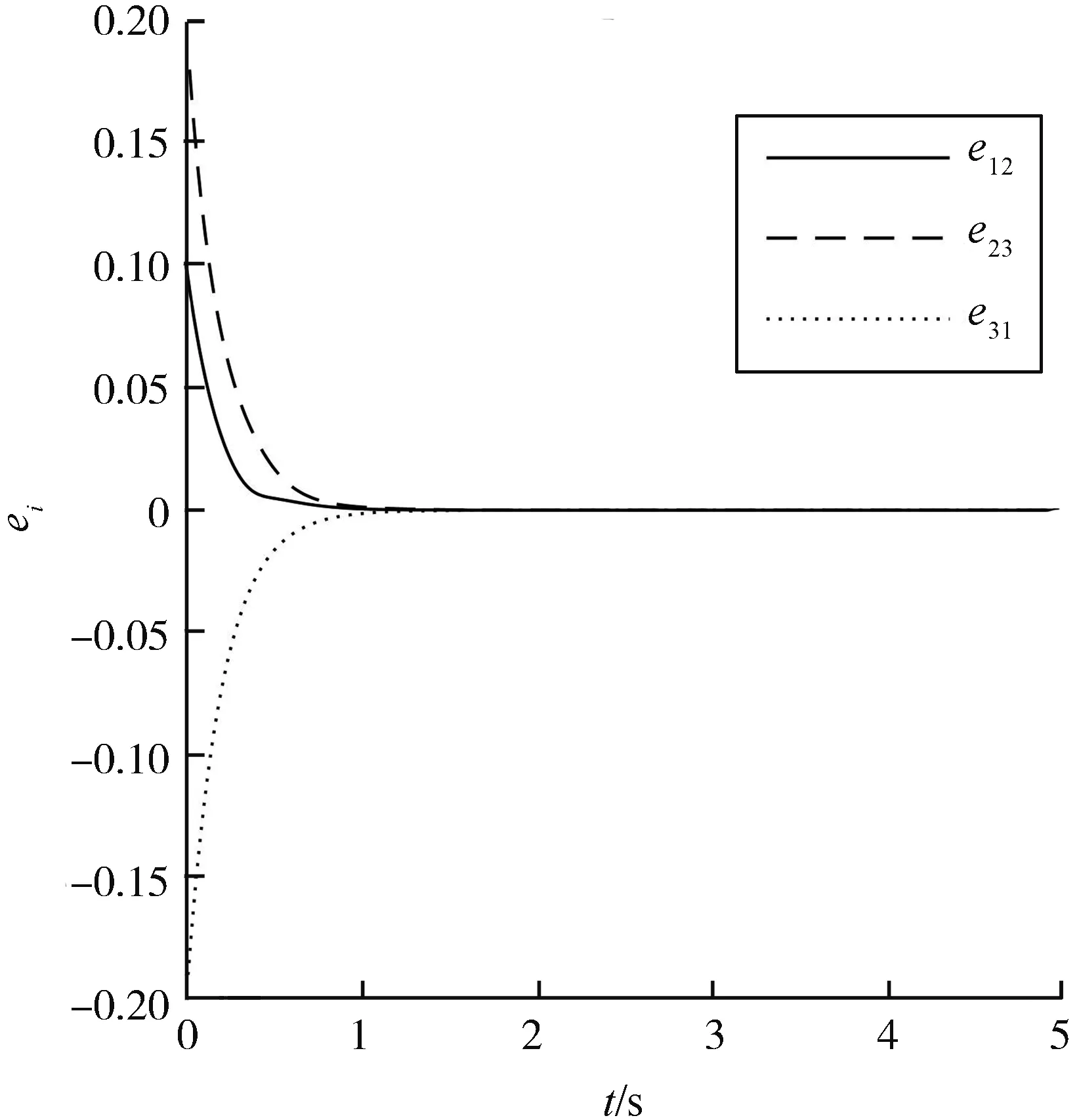
图17 参数a=24的误差曲线图(2)
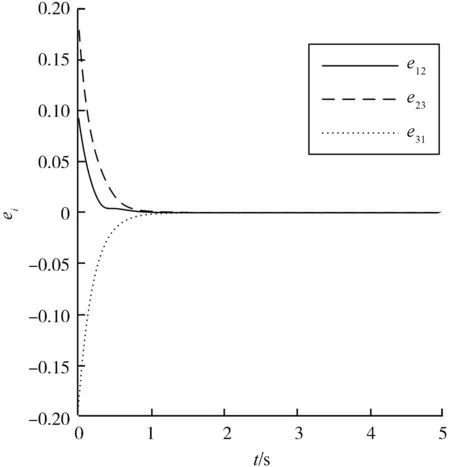
图18 参数a=26的误差曲线图(2)
从图17、18可以看出,随着参数的改变(此时仍为混沌状态),同步效果与图16基本一致,说明参数变动后,响应系统和驱动系统也可以很快达到同步,证实了通道2同步的有效性。
同理,可以验证其余通道同步方案的可行性,由此,可以得到文中所提的多通道同步控制方案是可行的。
4 结束语
文中首先提出了一个三维保守混沌系统,通过计算李雅普诺夫指数验证了系统为保守混沌系统,之后通过正弦项变换得到一个新的具有无穷多共存类混沌吸引子的系统,经过验证可以确定为保守混沌系统。最后,设计了一种多通道误差及同步控制方案,并利用MATLAB工具进行仿真,证实了经过正弦项变换后的保守混沌系统能够实现同步,验证了多通道误差系统及同步控制器的有效性。
