基于MATLAB/Simulink的车辆转向稳定性的仿真研究
2021-02-24马园杰周旭
马园杰,周旭
基于MATLAB/Simulink的车辆转向稳定性的仿真研究
马园杰,周旭
(湖北汽车工业学院机械工程学院,湖北 十堰 442000)
汽车的操纵稳定性是衡量汽车安全性最基本的指标之一,影响汽车行驶稳定性的基本因素主要有横摆角速度与质心侧偏角,将汽车简化为二自由度模型,建立关于横摆角速度与质心侧偏角的转向微分方程。基于MATLAB/Simulink软件建立仿真模型,对前轮转向与四轮转向典型的二自由度汽车模型进行仿真分析。对比两轮转向和四轮转向的稳定性。且四轮转向采用线控转向,将线控转向系统与四轮转向系统的优点结合起来,观察采用线控对汽车稳定性的影响。
二轮转向;四轮转向;横摆角速度;质心侧偏角
前言
随着人们对现代汽车安全性及操纵稳定性的关注,汽车行驶稳定性越来越成为人们备受关注的焦点。四轮转向相比传统的二轮转向,可以对汽车后轮进行主动控制。四轮转向采用线控比例控制,在低速时,后轮与前轮转向方向相反,可以减小汽车的转弯半径,提高汽车的机动性能。高速时,后轮与前轮转向方向相同,实现零质心侧偏角,提高了高速行驶的操纵稳定性,同时也能给予驾驶时的舒适感。
1 两轮转向和四轮转向模型的建立
汽车在平直路面等速行驶时的操纵稳定性,主要通过转向盘的角输入或力输入的响应来研究。为了分析汽车操纵稳定性的主要因素,将汽车简化为一个简单的二轮摩托车模型(线性二自由度模型)[1]。分析过程中,忽略汽车转向器、悬架系统的影响,且不考虑地面切向力对轮胎的影响及空气动力学的作用。认为汽车只做平行于地面的平面运动,且速度恒定。因此汽车的运动只有绕Z轴的横摆运动及沿Y轴的侧向运动。
1.1 二轮转向汽车线性二自由度运动微分方程的建立
车辆坐标系中汽车运动的描述如图1所示。
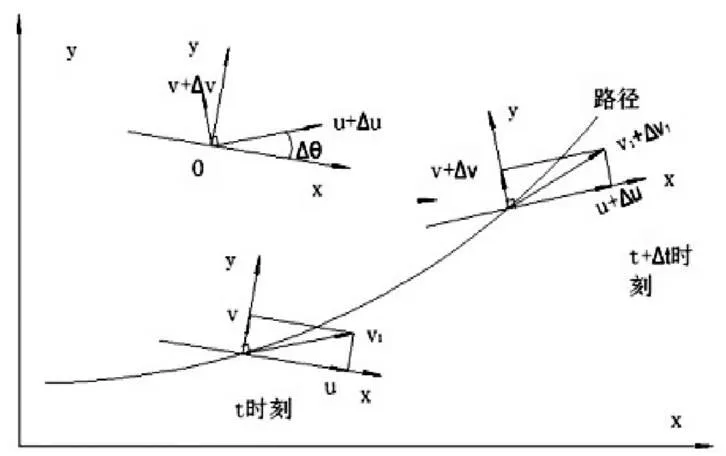
图1 车辆坐标系中汽车运动的描述
固定于地面上的直角坐标系为x0y,车辆坐标系的原点与汽车的质心重合,ox和oy分别为车辆坐标系的纵轴和横轴。因此质心的速度在t时刻在ox轴上的分量为u,在oy上的分量为v,同时还有绕质心做角速度ω的转动[2]。
为了得到便于分析和研究的方程式,进而得到前轮转向(2WS)汽车线性二自由度模型的运动微分方程:


将(1)式和(2)式转变为关于横摆角速度和质心侧偏角的微分方程:


其中:ω:横摆角速度;a:质心至前轴距离;b:质心至后轴的距离;I:车辆转动惯量;m:汽车的质量;u:车速;:车轮转角;1:前轮侧偏刚度;2:后轮侧偏刚度。
式(3)和(4)写成状态空间方程的形式:
其中:

1.2 四轮转向汽车二自由度运动微分方程的建立
四轮转向系统采用的整车模型同样为自行车模型,其横摆角速度和质心侧偏角的动力学微分方程为:


其中:δ—前轮转角;δ—后轮转角;
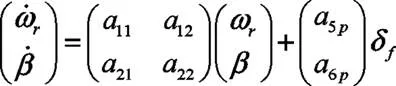
将式(7)和(8)写成状态空间方程的形式:

其中:
2 四轮线控转向的后轮转向控制策略
本文主要根据Sano分析得到的前后轮转角的比值随速度变化的函数,[3]即低速时逆向转动,高速时同向转动,后轮转角与前轮转角的比值即:
将式(10)代入(9)式,四轮转向汽车的状态空间形式为:
3 两轮转向与四轮转向仿真模型的建立
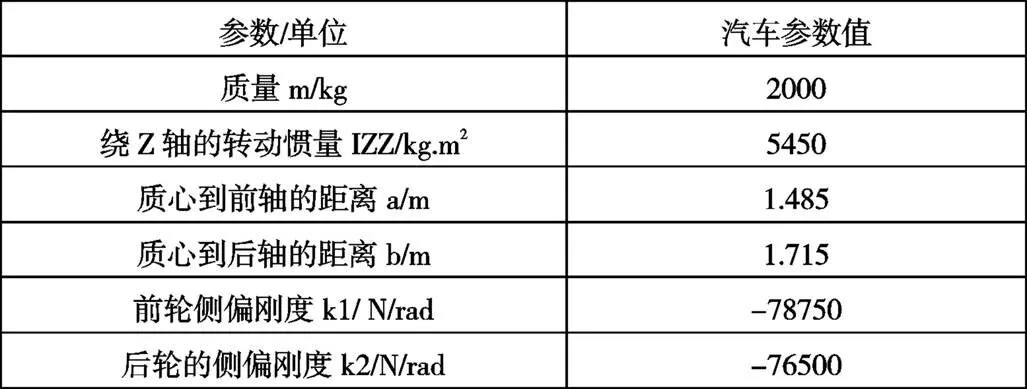
本文基于MATLAB-Simulink仿真平台进行仿真分析,汽车模型参数见表1。[4]
表1 汽车模型参数
3.1 汽车转向Simulink的建模与仿真
3.1.1速度变化对汽车稳定性的影响
给定汽车固定的方向盘转角(1°),在10m/s,20m/s和30m/s的速度下观察二轮转向与四轮转向的横摆角速度与质心侧偏角的响应。[5]
仿真模型如图2所示:
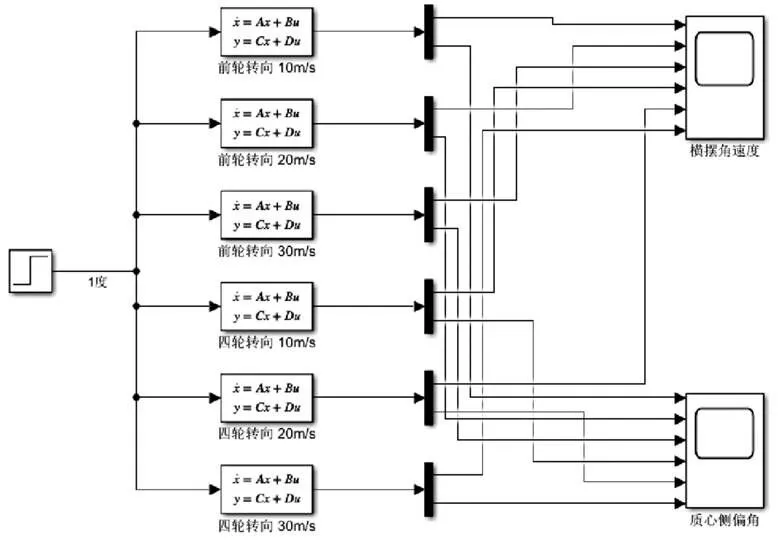
图2 速度变化的仿真模型
其仿真结果如图3和图4所示:
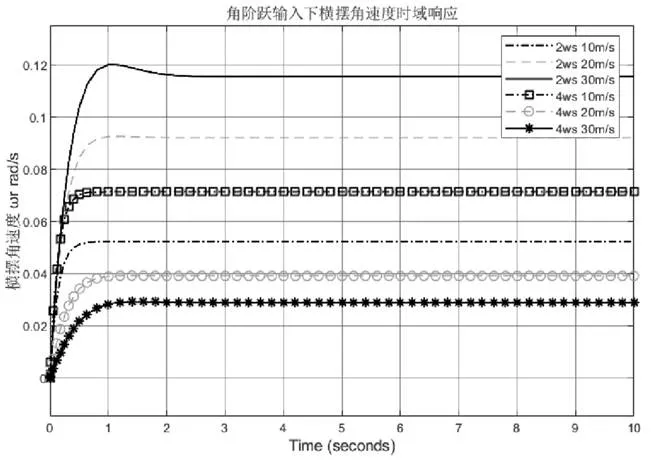
图3 角阶跃输入横摆角速度时域响应
由图3和图4可知,在低速时,4ws汽车的横摆角速度大于2ws汽车,但高速时4ws汽车的横摆角速度则小于2ws汽车,并且速度越高越明显。这有助于汽车在低速时有较好的机动性。同一车速下,两种汽车横摆角速度达到稳态的时间基本相同,四轮转向汽车的超调量小于两轮转向汽车,响应也比前轮转向的响应较快。无论在高速还是低速,四轮转向的质心侧偏角都接近于零,可以在很大程度上增加高速行驶时汽车的稳定性。
3.1.2方向盘转角对汽车稳定性的影响
在车速为30m/s的情况下,分别给予两轮转向与四轮转向以1°、2°和3°的方向盘转角,观察二轮转向与四轮转向在高速时汽车转向稳定性的响应。
仿真模型如图5所示。
图6和图7可以观察到,随着转向角度的增加,无论是二轮转向还是四轮转向,汽车的横摆角速度都会逐渐增加。同一转向角度下,四轮转向相比二轮转向的超调量比较小,且趋于稳定的时间较快。四轮转向的质心侧偏角均为正且接近于零,这有助于增加汽车的稳定性。
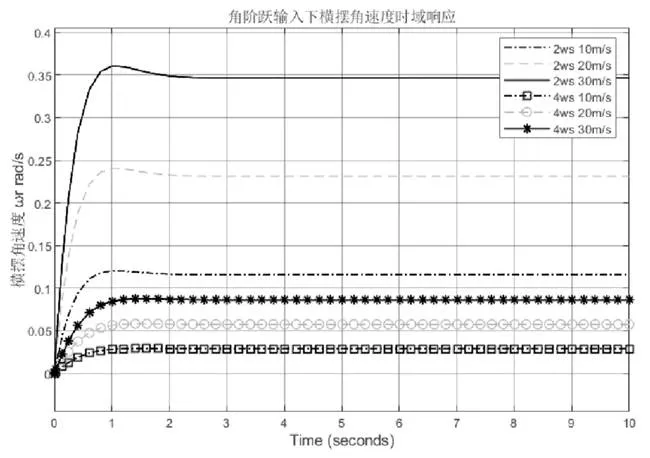
图6 角阶跃输入下横摆角速度时域响应
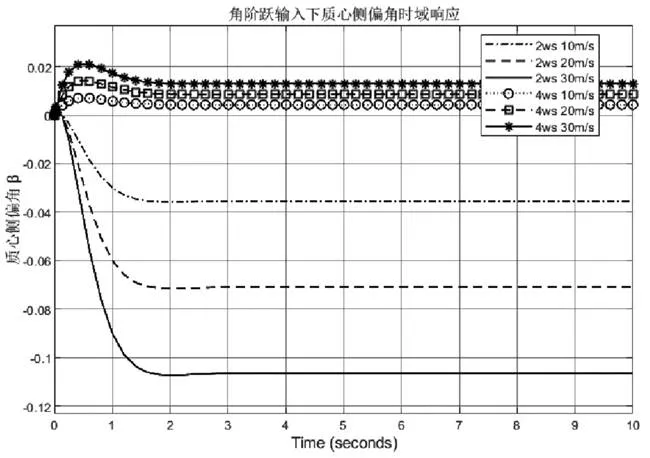
图7 角阶跃输入下质心侧偏角时域响应
4 结论
通过对影响汽车操纵稳定性的横摆角速度与质心侧偏角的分析,在采用比例控制的情况下,四轮转向汽车相比二轮转向汽车在低速时有很好的机动性能,在高速时,四轮转向汽车的操纵稳定性更好。但此比例控制在仿真过程中忽略了汽车质心随道路变化而产生的影响,在后续的研究中应将道路的真实情况及汽车的空气动力学考虑进汽车的转向操作中。
[1] 张文春.汽车理论(第二版)[M].北京:机械工业出版社,2009.12: 135-158.
[2] 于蕾艳,林逸,施国标.四轮线控转向系统的转向控制策略研究[J].计算机仿真,2008(4):278-281.
[3] 郭孔辉,轧浩.车辆四轮转向系统的控制方法[J].吉林工业大学学报,1998(10):3-5.
[4] 施国标,于蕾艳,林逸.四轮线控转向横摆角速度反馈控制策略研究[J].系统仿真学报,2008(1)506-508.
[5] 舒进.四轮转向车辆运动仿真分析[J].汽车科技,2002(11):6-8.
Simulation Research on Vehicle steering stability based on MATLAB/Simulink
Ma Yuanjie, Zhou Xu
(Department of Mechanical Engineering, Hubei University of Automotive Technology, Hubei Shiyan 442000)
Vehicle handing stability is the index to measure automobile safety. Yaw velocity and side slip angle are the basic factors that affect the vehicle handing stability. Simplify the car to two degree of freedom model. This paper establi -shed the differential equations of Yaw velocity and side slip angle. Using the MATLAB/Simulinl to create the simulation model and analyze the stability of Vehicle steering system. Combine the advantage of the wire steering system with four wheel steering , Observe its effect on stability.
Two wheel steering; Four wheel steering; Yaw velocity; Side slip angle
10.16638/j.cnki.1671-7988.2021.03.010
TP391.9; U463.41
A
1671-7988(2021)03-34-03
TP391.9;U463.41 文献标示码:A
1671-7988(2021)03-34-03
马园杰,硕士研究生,就读于湖北汽车工业学院机械工程工学院,研究方向:汽车零部件。
