多层模块化自动停取车系统设计
2021-02-24韩帮国
陈 蒙, 陈 丰, 韩帮国, 李 梦
(安徽科技学院 机械工程学院,安徽 凤阳 233100)
当今,国内汽车保有量较大、车位紧缺,致使路面拥堵等困扰。为解决这一问题,应声而出了当前的半自动停车库,在传统车库的环境基础上,通过用钢结构增加层数来达到倍数停车。此装置属起重设备,有一定安全隐患,并且机械结构极其复杂,成本高昂的同时,故障率也极高。
设计停车装置与传统地下车库相比,具有多方面的优越性。首先,土地利用率高,只需留出一条横向和一条纵向的通道,减少了多条通道占用的面积,也节省了土建开发成本。其次,安全性较高,传统的自然车库坡陡路滑车辆不受控制,地势低洼,车库易进水车辆受淹,而多层模块化停车装置只需要驾驶员将车开到运车板上即可完成车的停取,简单便捷安全可靠。且整体结构为模块化结构,可根据场地的大小,进行模块化搭配,适用于众多场地,也便于建设或改造。
停取车过程简单安全,汽车驶进指定的停车位置,驾驶员下车按下停车按键,此时运车板载车板、电梯厢配合运动,使车辆动到指定停车位,运车板下降将汽车放下退回原点,载车板恢复到原位,完成停车过程,取车同理。有兼于此,本项目通过Solidworks软件对系统进行结构设计与运动仿真,借助STM32作为主控芯片搭建控制系统,实现传感器信号的采集、电梯箱的升降、载车板的移动与循迹等动作,以期为解决停车难,车位紧张提拱参考。
1 机械结构设计
1.1 整体机械结构的组成
该停车装置的主要部分包括:载车板,可升降运车板,升降电梯,底部轨道,电磁铁,限位开关,视觉检测装置等,并加装了多种传感器,满足了功能上以及安全方面的需求。图1只用两层作为模拟,用来检测其运动过程的可行性。当车子驶入停车部分后,按下停车按钮,此时运车板动作,带动汽车移动,并配合载车板的平移,实现对指定位置的停靠;每个车位对应相应的按键,且每个车位加装有重力传感器,用来检测车位是否占用,运车板的移动过程中以及载车板的平行移动过程中,其终点位置都加装有限位开关,以及光电传感器摄像头等多种传感器,用来实现点位的精准停靠,以及避免了行进过程中的触碰。
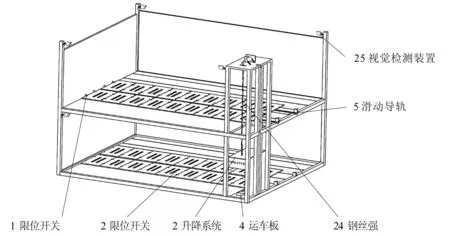
图1 整体机械结构图
1.2 载车板的设计
载车板主要由相对的一对电磁挂钩、移动滑轮等组成。电磁挂钩即在传统挂钩的基础上,加入了电磁铁装置,来达到电控挂钩的开合的效果。平常状态下两载车板间的电磁挂钩在弹簧的拉力下闭合,至使同排载车板同步移动,保证了多块载车板的同步移动,当电磁铁挂钩通电时,电磁铁装置推动挂钩脱离。通过控制指定载车板上的电磁挂钩的通电状态,实现了控制特定块载车板的横向平行移动,通过控制特定排与每排特定数目载车板的移动,来达到给汽车停取过程中预留行进通道的目的。载车板移动为滑轮滑轨移动,避免了载车板之间的纵向移动,也减少了移动过程中所需要克服的阻力(图2)。
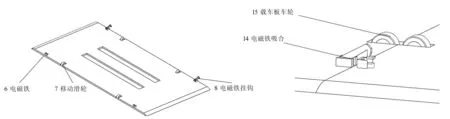
图2 载车板及电磁挂钩图
载车板的左右平移由电机带动同步带运动,在其左右极限位置都加装有弹簧柔性接触部件,实现了极限位置力的缓冲,同时在极限位置加装有限位开关,载车板运动完成状态可控。通过电磁挂钩,以及多排电机横向的拉动,使得载车板规律性运动,为停取车行进预留出通道(图3)。
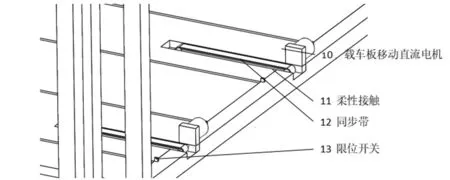
图3 载车板运动结构
1.3 运车板的设计
运车板(图4)主要由:剪式升降结构,剪式升降电机,减速器拉杆结构,和四个麦克纳姆轮组成。剪式升降结构的使用,能够提供较大的提升力,和平稳的升降过程。运车板的运动部分,主要采用了麦克纳姆轮四轮驱动结构,可很好的实现小空间内的灵活转向驱动,满足高精细定位和高精细的轨迹运动要求。运车板的下方都装有传感器,来实现横向运车以及纵向运车过程中的,路线循迹和修正。运车板在整体装置中起到连接载体的功能,停取车时通过算法控制载车板的移动来预留通道,载车板按预留规划路线制循迹到达指定位置,停放或取走汽车。

图4 运车板结构设计
1.4 升降系统的设计
升降部分主要由升降电机,带动电梯厢上下运动,同时箱壁与整体机构为导轨滑块连接,使电梯厢在运动过程中具有很高的安全性,同时每层之间都设有限位开关,升降层数可控。电梯厢为前左双门结构,方便停车以及运车板横向运动停取车,通过程序控制可配合运车板完成多层的停取车任务(图5)。
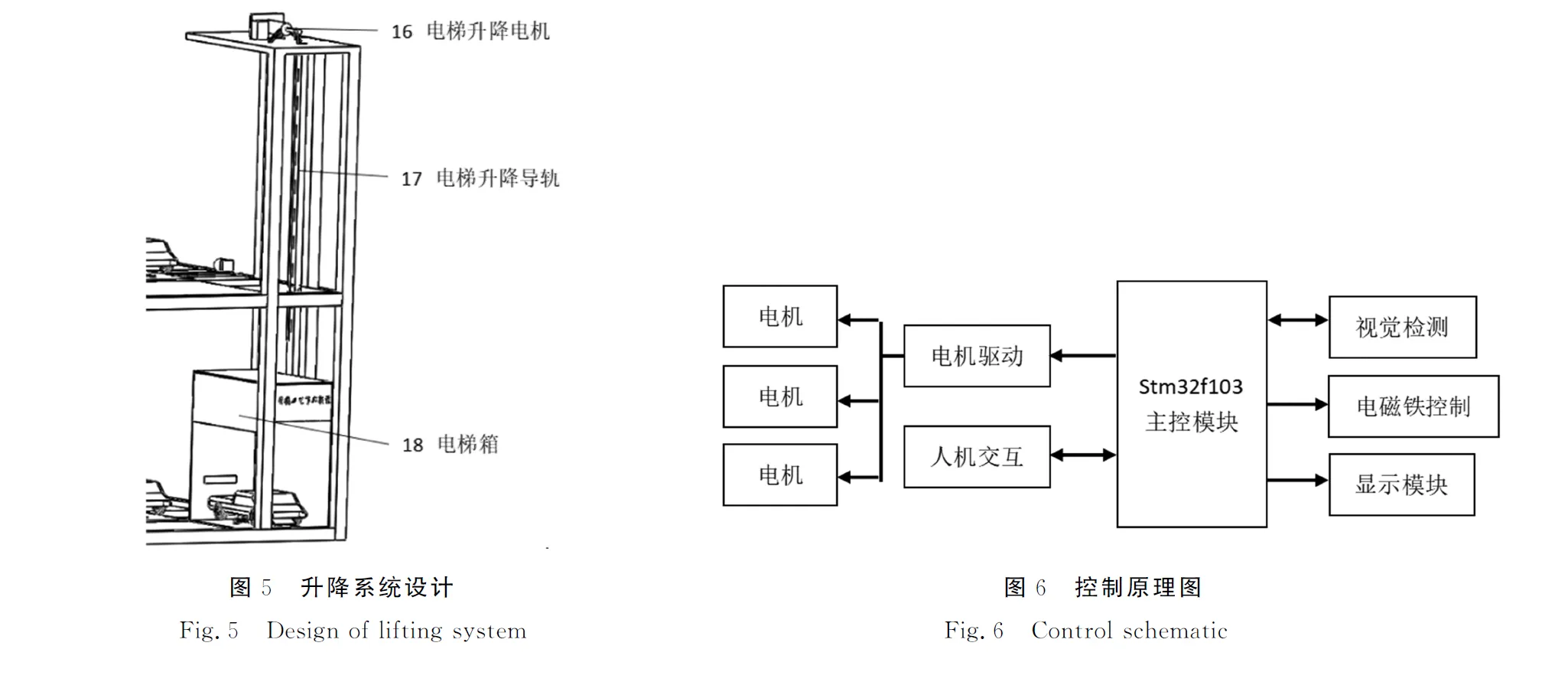
2 控制系统设计
2.1 系统结构设计
本装置控制系统选用由STM32f103作为主控芯片,加装有电机驱动模块、人机交互模块,以及视觉、电磁铁、显示等传感器模块,用于控制载车板、运车板、升降电梯及电磁铁的动作,除此以外载车板加装有重力传感器以检测车位使用情况,硬件结构设计原理如图6所示。
2.2 主控模块
此停车系统采用STM32f103作为主控芯片,该芯片共有144个引脚,112个双向I/O接口,满足该装置控制需求。
2.3 控制过程及工作原理
用第二层一特定位置停车为例,车主驶入停车位置即电梯厢内,无误后离开电梯厢,按下箱外停车按钮,此时系统根据车位规划停车位置,以及运动路线。后电梯厢内视觉检测车辆停放安全,和人员离开后电梯厢关闭,此时此次停车位路径中车辆,在电磁挂钩控制的载车板的带动下,横向运动预留出车辆行驶的通道。同时电梯升降电机工作,带动电梯箱运动至第二层,电梯箱触碰至二层限位开关后,电提箱左侧箱门打开,运车板顶升电机运动顶起车辆后,运车板按规划路线运动到达停车位置。此段运车板的运动主要是,算法控制麦克纳姆轮的横向运动和纵向循迹运动,同时视觉检测修正运动轨迹,避免行进路线的偏移,和行进过程中汽车间的触碰。运车板顶升电机反转放下车辆,完成车辆的停放,此时工作完成后的运车板,按原路线返回至电梯厢内,再回至原点即一层电梯厢内,等待下一指令,同时路径规划时移动的运车板,在其横向运动电机同步带的带动下复位,此时一次完整的车辆停放完成。取车时同理,层数的增加对机构的功能实现无影响,同时在停取车的运动中,载车板的运动在下达指令时便开始执行,其在运车板行至欲停靠车位纵向移动位置时便已动作完成,在运车板驶出停靠位置至横向运动通道时,载车板也同步开始运动,大大节省了停取车时间(图7)。
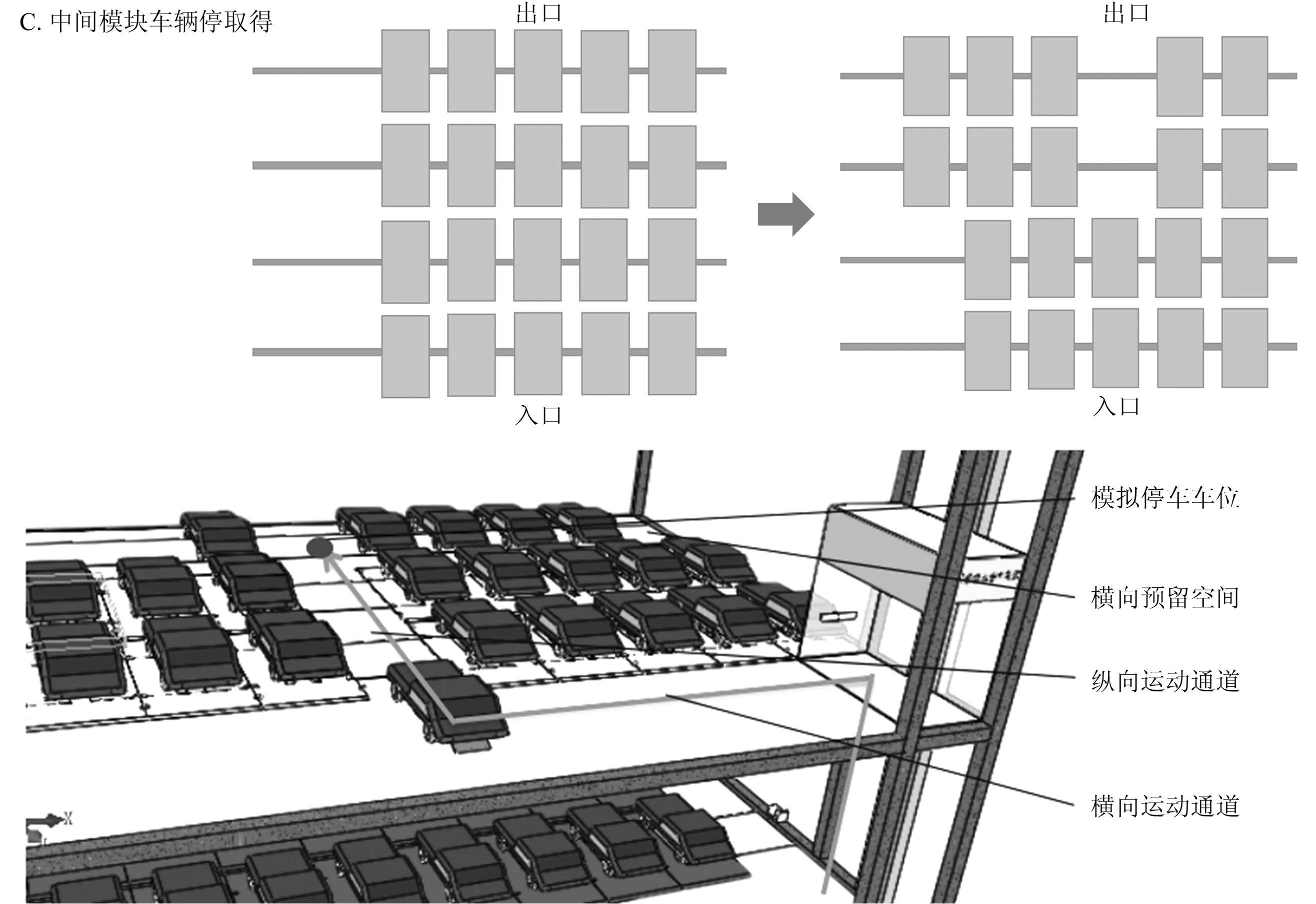
图7 模拟特定点位停车路线
3 机械及控制部分验证
本研究绘制出了整体车架SolidWorks图纸,以及细节图纸,对机械结构进行了仿真测试,验证了其结构稳定性,运动的可能性。并制作出了其机械模型,经过过模型实物的模拟,更进一步的验证了机械结构的稳定性,以及工作的可行性,并且模拟过程中,程序导入STM32单片机,模拟程序运行正常,工作过程无干扰冲突,现象满足预期要求(图8)。
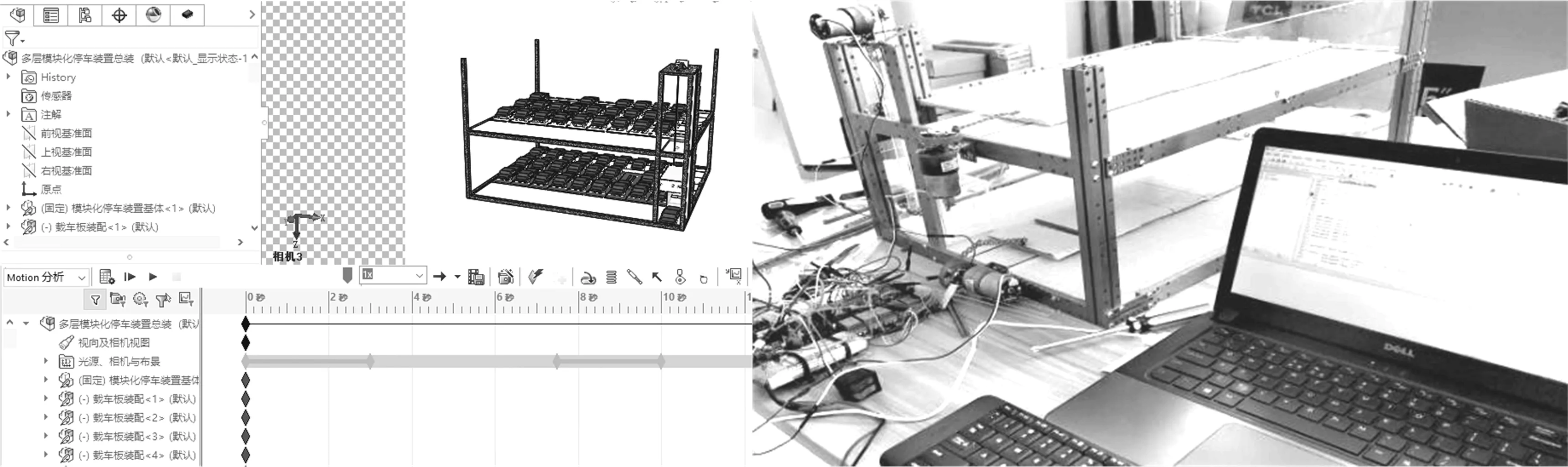
图8 停取车试验
4 结论及展望
我国汽车数量多,停车位不足,大城市这一现象更加严重,致使急需研发和投入使用停车设备。现目前设备结构及其复杂、成本高、障率高,不适合广泛的使用及普及。而多层模块化停车装置因其为模块化拼装,根据特定大小的场地搭配特定数量的载车板,达到最优化利用场地的目的,且为多层结构,大大的加大了土地利用率,并且机械结构简单,安全故障率低,故障直接更换相应的模块,维修也极为方便,使用的场合极为广泛。因此,多层模块化停车装置具有效率高、占地小、停取简单,结构简单稳定、安全等特点,因此此装置具很高的使用性能,和研究意义。
本研究系统地介绍了此停车装置的机械原理和控制原理,以及其工作方式方法,并且从理论试验及模型实物操作方面,验证了此多层模块化停车装置工作的可行性,以及多层工作的可行性,同时发现了此停车装置的诸多优点。就目前来看,已经完全可以满足城市布置及使用,但后续还会不断地优化此停车装置。