改进鲸鱼算法在电动汽车有序充电中的应用
2021-02-22张公凯陈才学
张公凯,陈才学,郑 拓
湘潭大学 信息工程学院,湖南 湘潭 411105
随着全球能源紧缺、环境污染和驾驶安全挑战日益加大,全球汽车产业正朝着电动化、智能化、网联化、共享化方向发展,全球节能减排是大势所趋[1]。大力发展以电动汽车为代表的新能源汽车,逐步替代传统燃油车辆,已逐渐成为我国的社会共识和发展方向[2]。大规模的电动汽车接入充电可能对电网带来负荷冲击,给电力系统可靠运行带来新的挑战[3]。如何高效地实现大规模电动汽车的优化调度,已日益成为人们关注的热点问题。
近年来,利用高效的控制策略和先进的优化算法实现电动汽车有序充电已成为电动汽车调度的有效手段。文献[4]为实现峰谷电价引导电动汽车用户有序充电的最优化,建立了电动汽车对差异化电价机制的响应模型,利用遗传算法计算出最优的峰谷电价划分方法。文献[5-6]建立了以“削峰填谷”为目的的主控层优化目标函数,多种次级层优化目标协同控制的分层控制策略增强了实际工程中电动汽车优化调度的实时性和实用性。文献[7]控制换电站充电电池数量,综合考虑变电站容量,换电站满意度等约束,采用改进布谷鸟算法高效地实现了负荷曲线离差平方和的最小化。文献[8]建立了最小化可再生能源的出力波动和最大化电动汽车用户收益的目标函数,利用改进化学反应优化算法进行求解,最后实现了多种可再生能源出力与电动汽车充电之间的协同优化调度。
启发式算法在工程中的应用越来越得到重视,如典型的遗传算法[9]、粒子群算法[10]、模拟退火算法[11]等,本文采用的鲸鱼算法(Whale Optimization Algorithm,WOA)是新型群体智能优化算法,众多学者在研究该算法的同时也提出了先进的改进方法。如文献[12]为防止WOA算法在求解大规模优化问题时陷入局部最优,引进了非线性收敛因子,并利用对立学习策略初始化鲸鱼种群,有效地提升了WOA 算法的收敛速度和求解精度。文献[13]在WOA 算法中融入了信息交流强化机制,并采用正余双弦机制和混沌算子来提升算法跳出局部最优的能力。文献[14]利用对立搜索策略初始化WOA算法种群,采用精英反向学习策略提升种群多样性,并结合差分进化进行变异修正,显著提高了鲸鱼算法的收敛精度和收敛速度。
本文对WOA 算法进行了研究改进,提升其在大规模问题中的全局搜索能力与收敛速度。以私家电动汽车为主要研究对象,利用蒙特卡洛法模拟大规模电动汽车的出行规律。建立了考虑电网层峰谷差最小和用户层充电费用最小的多目标优化函数,最后利用改进鲸鱼优化算法(Improved Whale Optimization Algorithm,IWOA)对优化目标函数进行求解。
1 电动汽车有序充电
1.1 电动汽车出行规律
通过对美国交通出行数据[15](NHTS2009)进行拟合得到私家车的出行规律,电动汽车用户每日行驶里程数近似满足对数正态分布,概率函数为:

式中,μD为期望值,μD=3.20;σD是标准差,σD=0.88。
考虑到电动汽车充电的时间特性,电动汽车充电的起始时间以电动汽车最后返回时间为参考依据,电动汽车用户最后一次返回时间近似满足对数正态分布,其概率密度为:
式中,μt为期望值,μt=17.6;σt为标准差,σt=3.4。
1.2 有序充电数学模型
根据式(2)时间分布可知,大规模电动汽车无序充电会集中在电网负荷高峰期,因此控制中心将一天24 h分96 个时段,每15 min 初刷新电动汽车充电请求数据和配电网实时功率,以分时电价为背景,利用优化算法计算出最优充电负荷曲线以及电动汽车起始充点时间,控制中心依照最优解为该时段做出有序充电安排。
电动汽车荷电状态(State of Charge,SOC)是电动汽车有序充电时长的重要参考依据,将第i辆电动汽车到达充电站时的剩余电量荷电状态作为充电的初始电量SOC0,i,若电动汽车离开时电池充满,即在充电站的充电量为1-SOC0,i,电动汽车充电时长计算方式如下:

式中,Ti为电动汽车充电时长;Di为蓄电池容量;pi为电动汽车充电功率。
为实现电动汽车的优化调度,本文建立了考虑到电网层和用户层协同优化的两方面目标函数。针对电网层,为缓解电网负荷“峰上加峰”问题,建立了最小峰谷差的目标函数f1,如式(4):

式中,τ表示一天中的第τ个时段;i表示总车辆数N中的第i辆车;pi表示第i辆车的充电功率;Ciτ表示第i辆车第τ时段是否充电,1代表充电,0代表不充电;P0表示电网各时段的基础负荷。
电动汽车用户是否愿意响应有序充电安排是极其重要的因素,为了提升用户对调度安排的积极性,本文建立了考虑用户层充电费用最小的优化目标函数f2,如式(5):

式中,Mτ表示该时段电价;总共n个时段,Δt表示一个时间段时间长度;第i辆车的充电时间
本文将函数f1和函数f2进行归一化后作为单目标函数求解,权重系数为α和β,并且通过设置权重系数的值来控制两种优化目标的比重,工程中依据决策者偏好确定权重系数。

式中,fEV为归一化后的单目标优化函数。
1.3 约束条件
电动汽车充电开始时刻等于或晚于当日最后返回时间,电动汽车以充满为前提,若次日首次出行时刻之前无法充满,对充电时间建立约束,约束条件如下:

式中,为开始充电时刻;为电动汽车用户最后返回时刻;Ti为充电时长;为用户次日首次出行时刻;N为电动汽车总数。
考虑到配电网安全,所有时段的充电负荷均不能超过配电网的功率上限,即:

其中,Pbase表示大规模电动汽车接入前配电网各时段的基础负荷;Psta为配电网所能承受的功率上限值。
2 改进鲸鱼算法
2.1 基本鲸鱼算法
鲸鱼算法(WOA)是由澳大利亚学者Mirjalili 和Lewis[16]于2016 年提出的新型群体智能优化算法,该算法是模仿座头鲸捕食的仿生算法。WOA算法中鲸鱼在全局中最优位置便是目标函数的全局最优解,基本WOA算法原理如下。
(1)环绕包围捕食
鲸鱼能观察到猎物的位置并进行包围,初始状态无法获取全局最优位置,于是设定当前最优鲸鱼的位置为目标猎物的位置,鲸鱼群中其他鲸鱼首先计算与目标猎物的距离,计算公式如式(9):

式中,t表示当前迭代的次数;i表示第i个个体,表示迭代到第t代最优鲸鱼的位置;Xt,i是第i个鲸鱼个体在第t代中的位置;C=2r为摆动系数,r是[0,1]之间的随机数。
计算鲸鱼个体与最优鲸鱼位置的距离后,其他鲸鱼个体以跟随的方式向当前目标猎物靠近,位置更新公式如下:

式中,A为收敛因子;r是[0,1]之间的随机数;a值递减过程与迭代次数呈线性相关,两者关系如下:

其中,tmax为最大迭代次数。
(2)螺旋气泡捕食(局部搜索)
鲸鱼在发现猎物后,先计算自身与猎物的距离,如式(12),然后朝着猎物以螺旋形轨迹向上游动,其螺旋轨迹数学模型如式(13)。

式中,D′是第i只鲸鱼到猎物之间的距离;l是[-1,1]内的随机数;b为螺旋形的系数。
根据式(11)可知,当a值在减小时,收敛因子A也随着a值变化而减小,当收敛因子A取值为[-1,1]时,鲸鱼位置的更新将以收缩形式进行。
当鲸鱼个体以螺旋形式向上游动时,也会按照设定概率P进行收缩,如式(15)。当设定鲸鱼个体以0.5的概率进行螺旋游动时,同样也会以0.5的概率进行收缩。

式中,p值为[0,1]之间的随机值。
(3)随机更新位置(全局搜索)
当收敛因子 |A|≥1 时,鲸鱼个体不再依照最优鲸鱼位置而更新自身位置,而是采用随机更新自身位置的方式进行全局搜索,其数学模型如下:

式中,Xrand为从当前鲸鱼群体中随机选取的鲸鱼个体的位置。
2.2 改进方法
2.2.1 非线性惯性权重
惯性权重影响的是鲸鱼个体的收敛速度与搜索能力,一个较大的惯性权值有利于全局搜索,而一个较小的惯性权值则更利于局部搜索。根据WOA算法的搜索机制,前期需要较高的全局搜索能力保证求解多样性,后期需要较高的局部搜索能力提升收敛速度,为平衡两者关系,引入了两种非线性惯性权重ω1和ω2,其数学模型如下:
式中,ωmax为惯性权重的最大值;ωmin为惯性权重的最小值;t为当前迭代次数;Tmax为最大迭代次数。
ω2在迭代前期的惯性权值下降快,后期权值下降慢,在局部搜索阶段较快降低搜索步长,提升局部搜索能力。ω2应用在WOA 算法局部搜索阶段以改变步长因子A,如式(19)。

ω2在迭代前期的惯性权值下降慢,后期权值下降快,用来改变随机位置更新速度的步长,能提升前期全局搜索的能力,改进公式如式(20)。

2.2.2 教学策略
在WOA 算法寻优过程,鲸鱼群体的跟随特性会使大部分个体向当前最优个体区域靠拢,若当前最优个体为局部最优,最终寻优结果也极易陷入局部最优。针对该问题,本文受教学算法[17]的启发做出相应优化,提出了一种基于教学策略(TLS)的改进方法。
在TLS 中,以学生的考试成绩作为对应个体X的适应度值,成绩最好的是教师,将其确定为最优个体XBest,高于班级考试成绩平均值的学生确定为优等个体,而低于班级考试成绩平均值的学生确定为差等个体。对应群体为优等个体群Pbetter,差等个体群Pworse。TLS主要包括以下几个阶段:
(1)个体分类阶段
根据所有个体的适应度值,计算出平均适应度值Mean,如式(21)。然后根据分类方法将教师外的所有个体分成Pbetter和Pworse,如式(22)。
其中,Xt,i的适应度值表示为f(Xt,i);size为个体Xt,i的种群数规模。
(2)进化与调整阶段
本阶段主要针对优等个体群Pbetter,以一种标准来评价优等个体Xt,i适应度值的可提升程度,然后将该个体确定为“可进化个体”和“可调整个体”两种状态。
评价个体状态的公式如式(23),当经过一次迭代后,一个适应度值较低的优等个体Xt,i的适应度值发生较大变化,即h≥1,则将其确定为“可进化个体”,而一个较高适应度值的优等个体Xt,i的适应度值仅发生较小的变化,即0<h <1,则将其确定为“可调整个体”。

其中,r是[0,1]之间的随机数,保证式(23)的分母不为0。
“可进化个体”在适应度值提升方面具有很大的潜力,因此在后续迭代过程中,该个体Xt,i将随机选取一个优等个体Xt,j进行有效信息交换。而“可调整个体”具有较小的提升潜力,在后续迭代过程中只进行轻微变异,文中以高斯变异方式进行扰动,提升个体多样性,能避免个体进化的停滞,两种个体的变化方式如式(24)。

其中,Xt,i为迭代当前的个体;Xt+1,i是根据对应变异方式产生的新个体;Gauss(μ,δ2)是当前个体进行高斯变异扰动的随机数。
为避免个体出现退化,针对式(24)中新旧个体采取优胜劣汰规则进行选择,即对比新旧个体的适应度择优而取,选择规则如式(25)。

(3)教学引导与自我学习阶段
差等个体Xt,i的适应度值普遍较低,并且相互之间差异较大,利用最优个体Xbest引导能有效提升差等个体Xt,i的适应度值,但是差等个体Xt,i的适应度值不能跨越式提升,需要进行反复的教学引导和自我学习,其中教学引导的方式如式(27)。
式(26)中,f(Xt,i)对应差等个体Xt,i的适应度值,diversity求出Pworst的多样性。式(27)中,Cmax=max(Ci)。
根据式(22)和式(23)判定,通过多次教学引导后的差等个体Xt,i,若实现f(Xt,i)≥Mean则作为优等个体处理,若f(Xt,i)<Mean且 0<h <1 ,该差等个体Xt,i的提升很微小,还需要进行自我学习。文中以一种非线性变异方式进行,如式(28)。

式中,C值为摆动因子,与式(9)中一样,C-1 使变异朝着随机方向进行;指数函数exp(-(t/Tmax)2)控制着扰动大小,因其从1到0进行非线性递减,且递减速度由慢到快,能够在扰动初期产生足够大的扰动因子,使差等个体产生足够变异以提高种群多样性,最后采用式(25)的选择方式。
2.2.3 IWOA算法求解流程图
根据非线性惯性权重和TLS 对基本WOA 的改进方法,得到改进鲸鱼算法(IWOA)求解有序充电的流程如图1所示。
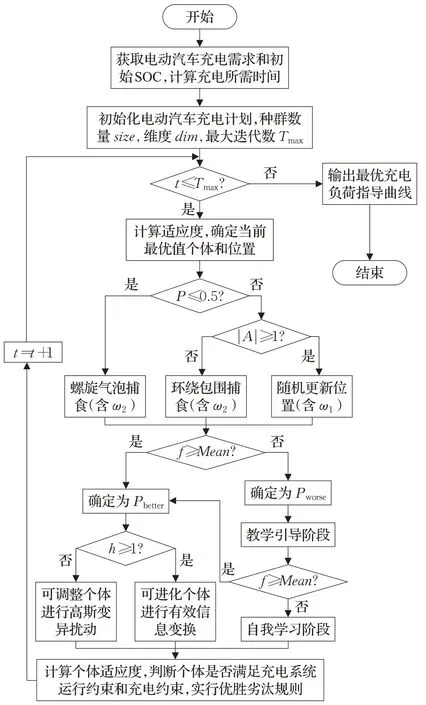
图1 IWOA算法求解流程图
3 仿真验证
3.1 测试函数
为验证IWOA 算法求解单峰和多峰基准函数的性能,文中采用两种基准函数进行测试,即单峰噪声基准函数f1(Noisy Quardrise)和多峰基准函数f2(Rastrigin),两种基准函数的基本信息如表1。
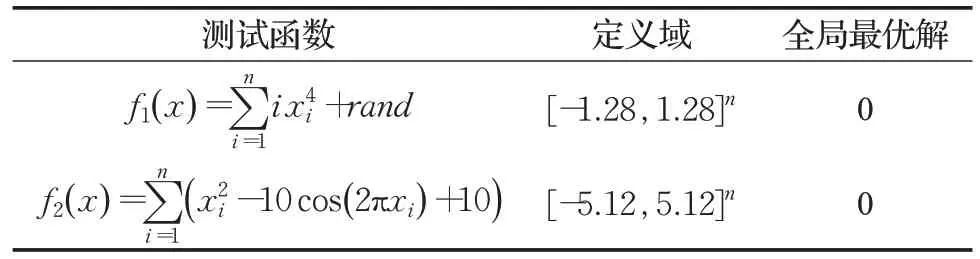
表1 测试函数基本信息
IWOA、WOA 和PSO 算法求解两种测试函数以对比优化性能,三种算法的Tmax为1 000次,种群规模size为50;对比性能指标包括平均值(Mean)、标准差(Std.)以及计算机的运行时间(Time);为体现求解的可靠性,三种算法求解两个函数均达到100 次,并求出100 次计算的实验结果的平均值和运行的平均时间。由于篇幅有限,两种测试函数决策变量维数设定分别为100、300、500。测试结果见表2。
从表2 可知,在求解方面,对比平均值能够看出IWOA算法具有更好的收敛精度,标准差体现IWOA求解过程具有较好的鲁棒性,从平均时间可以看出IWOA具有很快的收敛速度。通过测试,验证了对WOA 的改进方法具有可行性和高效性。
3.2 有序充电实例仿真
本文以某区域配电网为例,分别利用PSO 算法、WOA 算法和IWOA 实现大规模电动汽车的有序充电。为体现在实际工程中的意义,对比性能指标包括峰谷值、峰谷差率、用户充电费用,以及三种算法求解效率。
该区域常规接入车辆总数为500 辆,电动汽车充电采用常规恒功率充电模式,充电功率3 kW,电池容量30 kW·h,每100 km耗电量固定为15 kW·h,每次充电都充至满电量。充电开始时刻、日行驶里程、充电功率为相互独立随机变量,当日充电电量为当日行驶耗电量,车辆最大里程为200 km,按照对数正态分布生成里程,大于200 km的按照200 km计算。
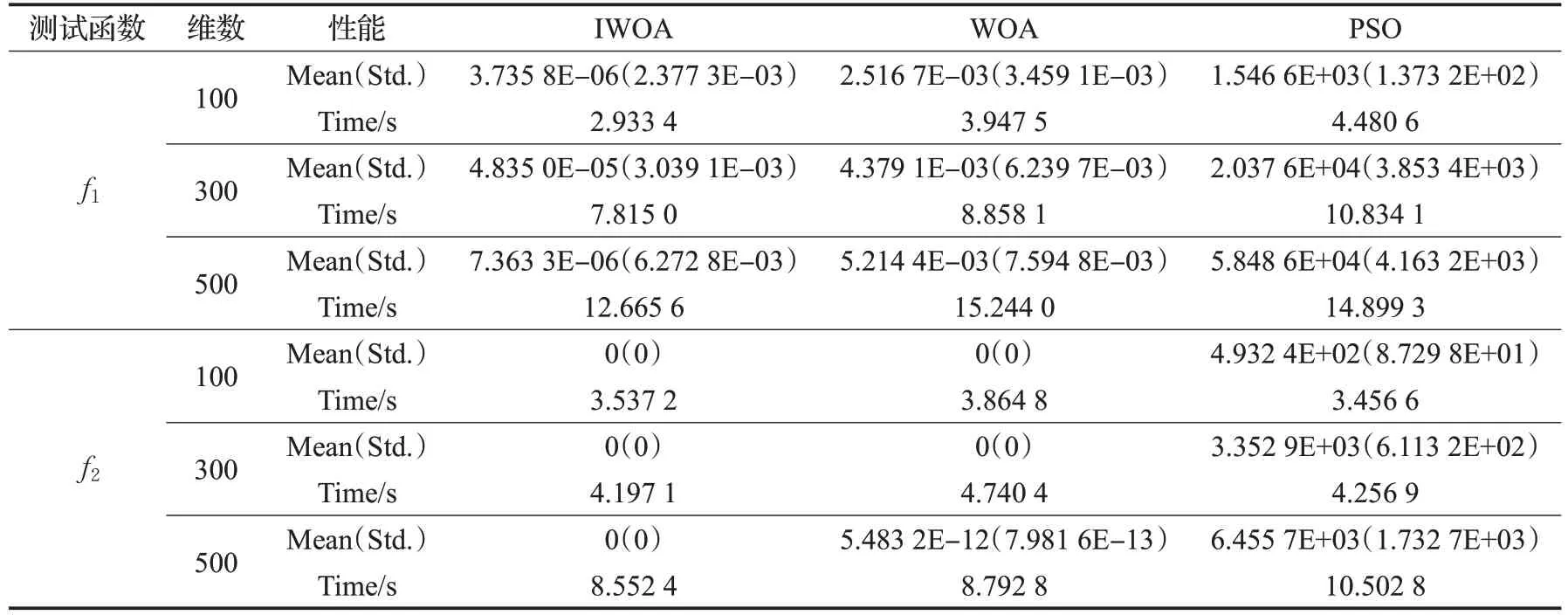
表2 测试结果
考虑到电动汽车用户充电费用计算,参考电动汽车运营商向电力批发市场购电采用的国内工业用电分时电价[18],具体参数见表3。
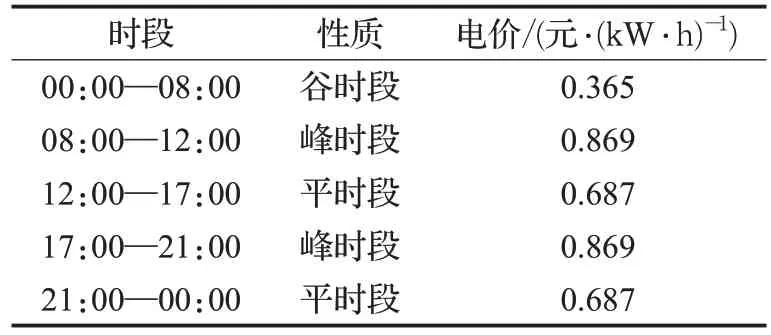
表3 分时电价参数
本文对三种算法基本参数进行设置,其中最大迭代次数均为500 次,种群规模均为50 个,决策以电网层为主,用户层为次,因此设置α值为0.6,β值为0.4。由于大规模电动汽车无序充电和优化算法求解都存在随机性,导致每次求解最优成本和削峰填谷值都有较大差别,因此本文进行100次仿真以具有实际意义的电动汽车有序充电负荷和成本为评价指标,选取典型仿真图,如图2所示。
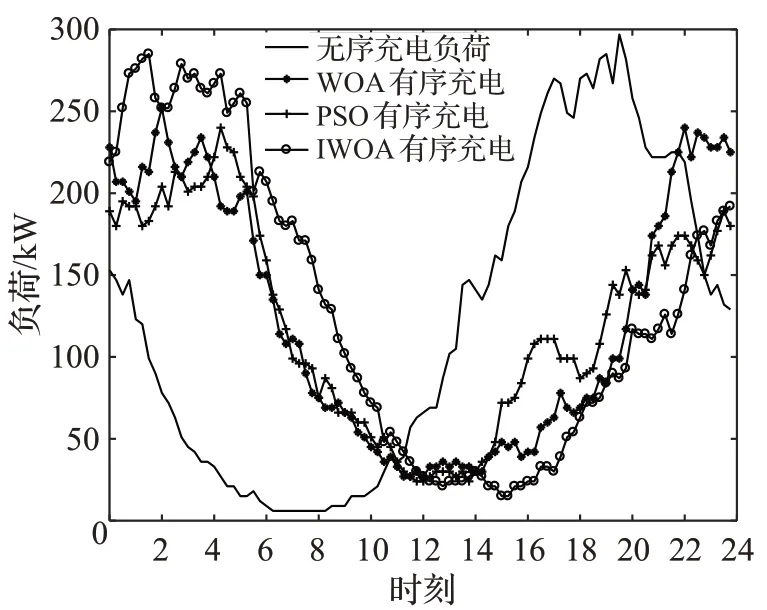
图2 有序充电负荷曲线图
从图2中负荷曲线可以看出,无序充电负荷高峰时段集中在16:00—20:00,低谷时段主要集中夜间,在满足约束条件下,将电动汽车负荷从高峰期转移到低谷期的能力对比,IWOA算法明显具有更好的效果。
优化前后的规模化电动汽车接入该区域配电网的总负荷曲线如图3。

图3 有序充电总负荷曲线图
从图 3 中可以直观看出,PSO 算法、WOA 算法、IWOA 算法均实现了对电网的削峰填谷,但是对于“削峰”段和“填谷”段,IWOA 算法均优于对比的两种算法。除此之外,还需要对比峰谷差率和充电费用,具体参数对比见表4。
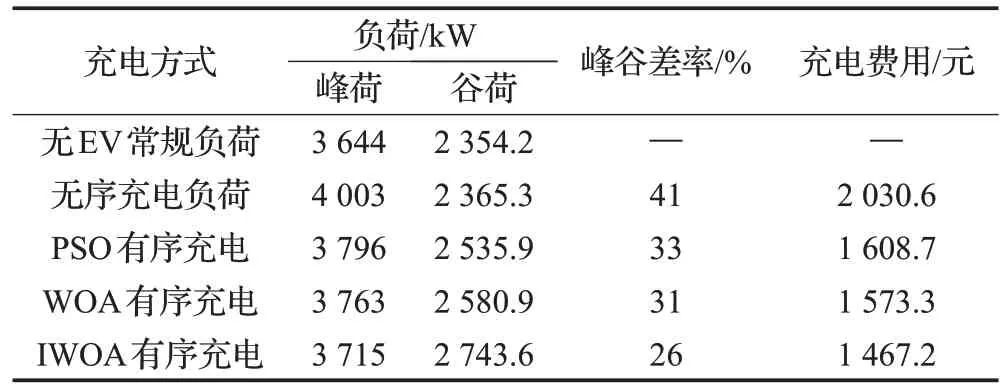
表4 系统负荷水平比较
分析表4 可知,无序充电情况下,电网负荷在峰值相比无EV常规负荷增加了359 kW,若电动汽车规模持续增大,会电网造成严重的“峰上加峰”影响。将有序充电与无序充电的峰谷值的差值分别定义为削峰值和填谷值,将有序充电与无序充电的充电总费用的差值定义为节约费用,以上数据统计如图4。分析可知,在分时电价背景下,采用IWOA算法的有序充电能够更高效地实现削峰填谷和节约充电费用。
优化算法的求解速度与精度是衡量优化算法是否实用的重要依据,本实验经过100 次运行验证,并选取了最具代表性的迭代图,三种算法求解优化目标函数迭代过程如图5。
从图5 中可知,IWOA 算法在第163 次迭代完成寻优,相较于对比算法具有更高的寻优精度和收敛速度,并且在迭代过程具有很好的鲁棒性,证明了IWOA算法在有序充电应用中的实用性和高效性。
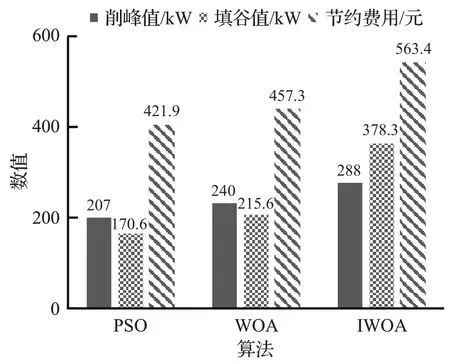
图4 优化效果对比
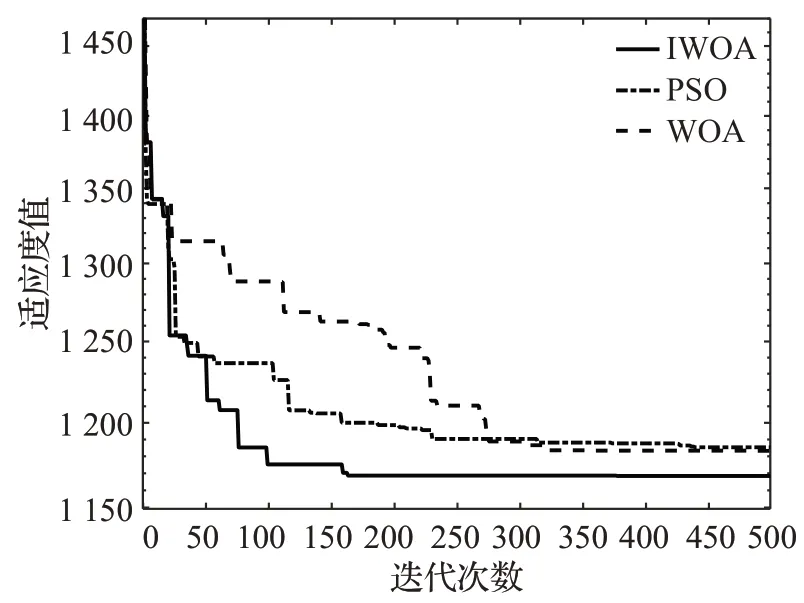
图5 对比算法迭代图
4 结束语
本文建立了以电网层为主,用户层为次的电动汽车有序充电优化模型,为提升WOA 算法在求解有序充电问题时的高效性,加入了两种非线性惯性权重,并利用TLS 提高鲸鱼个体质量和种群的多样性。IWOA 算法在测试函数中表现出求解的优越性,最后应用在电动汽车有序充电中进行求解。
仿真结果表明,大规模电动汽车经过合理安排充电时间能够实现电网的“削峰填谷”,并能为用户减少充电费用。经过对比实验,通过改进的WOA 算法在求解大规模问题具有更高的寻优精度和收敛速度。下一阶段的工作将深入研究WOA算法在求解多目标优化函数中的应用与改进,进一步提升该算法在工程问题中的应用价值。
