自适应耦合权重下的异质群体一致性研究
2021-02-22陈世明林子朋高彦丽裴惠琴
陈世明,林子朋,高彦丽,裴惠琴
华东交通大学 电气与自动化工程学院,南昌 330013
网络化的网络物理系统和嵌入式系统技术的进步引起控制领域对研究多智能体系统(Multi-agent System,MAS)的兴趣的增长。迄今为止,为MAS开发的控制技术使人们能够将弹性、廉价和灵活的方法应用于维护、监视、侦察、搜索和救援任务,建设和操纵等许多领域的各种协同合作任务。MAS 中的个体同时工作,个体之间相互有规则地进行信息传递,具有自主协调控制和分布式控制的性能和很强的鲁棒性,以及较高的运转效率[1]。一致性是MAS中的一项基本性合作任务,要求系统中的每一个体都应就某个特定的状态量达到一致,但是只需要利用自身状态和邻居局部信息来更新其状态量[2]。
现有的许多一致性问题研究都是在同质或者同阶数的模型下完成的,但是在实际应用的过程中发现这个前提过于理想,而包含不同动力学结构的异质多智能体系统更符合广泛的应用需求。Tian和Zhang[3]提出针对不同通信延迟的系统,高阶系统一致性不要求每个智能体的固有时延等于智能体之间的通信延迟,并给出了自身固有延迟和通信延迟的匹配条件。Liu 等[4]通过设计基于事件触发原理的分布式输出控制器,令智能体的最终一致性误差为0,从而解决了无向拓扑下的系统输出一致问题。
以上研究结果的通信网络都是基于无向图,而实际应用中有向通信拓扑应用更加广泛。Zheng 和Wang[5]研究了包含二阶和一阶的异质MAS 在固定有向通信拓扑和切换有向通信拓扑下达到一致性的充要条件。Zhang 等[6]采用了包含Markov 链的控制器来解决异质MAS在实际网络内部的未知通信状态和局部信息交换问题,并通过设计状态反馈控制器使系统达到一致状态。Li 和Liu[7]提出了基于随机不可分非周期矩阵和伪预测方法的二级一致性控制协议,用以解决线性时不变异质MAS的通信时延。
随着研究的深入,多智能体系统的应用环境变得更加复杂,为了应对实际任务中存在的未知变化或者任务本身需要多个小组分工完成,要求系统中的智能体能够自行组织成个体群组完成分工任务。群一致性就是使网络中的智能体分成多个子群体,不同的子群分别向不同特定状态量渐进收敛并分别实现状态一致。
Yu和Wang最早在文献[8]中提出,当系统满足两个子群之间的相互影响达到平衡时可以实现异质MAS的群一致性。宋海裕等[9]提出了融合牵制控制器的一阶多智能体系统群一致性。实际应用中除了要考虑智能体的位置信息,也要考虑智能体的速度信息。Cui 等[10]研究了二阶有向拓扑结构下的群一致性追踪控制,设计了智能体入度平衡的控制协议,使得研究结果可以从两个子群扩展到n个子群。Xu等[11]设计了分布式自适应牵制控制协议,使得二阶非线性多智能体系统在全局信息缺失的情况下实现渐进群一致性。Xie等[12]使用不同于常规切换拓扑或马尔科夫切换拓扑的切换信号集来实现二阶多智能体系统群一致性。Gao等[13]根据拓扑图入度是否为0和非负矩阵群一致性准则,讨论了存在切换拓扑和时延条件的二阶离散时间多智能体系统的群一致性。
现有关于多智能体的文献中,或者考虑异质多智能体一致性,或者考虑高阶系统或分数阶系统的一致性,或者考虑同质多智能体系统群体一致性,关于异质多智能体系统群体一致性方面研究还较少。然而,研究具有异质多智能体系统的群体一致性控制具有现实意义和理论意义。本文基于固定通信拓扑研究异质多智能体系统,针对通信拓扑结构中每一条边施加自适应耦合权重,使得多智能体系统仅依赖智能体邻居个体信息来实现群体一致性控制,与经典多智能体群一致性相比,经典异质多智能体系统通信拓扑边的耦合权重是固定值,而通过加入自适应控制调节边的耦合权重可以有效提高多智能体系统的收敛速度。
1 预备知识和问题描述
1.1 代数图论
假设G=(v,ε,A)为一个无向的通信拓扑,其中包含n个节点,MAS网络内部的边体现所连接的个体之间的通信关系。每个智能体依靠其邻居个体的状态信息来更新其控制输入。其中V=(v1,v2,…,vn) 表示节点集合;ε=v×v表示边集合;A=[aij]n×n是加权邻接矩阵,如果eij∈ε,则aij >0 ,否则aij=0 ,并且aij=aji。如果存在边eij=(vi,vj),则说明节点vi可以从节点vj中获得信息。Ni={vj|eji∈ε} 表示节点vi的邻居节点集。如果节点vi和vk之间存在一系列的边(vi,v1),(vi,v2),…,(vk-1,vk),则表示一条通路存在于MAS网络的两个体之间。如果无向通信网络内部每一对节点之间存在一条通路,则说明网络拓扑图G是无向连通图。L=D-A表示拓扑图的Laplace 矩阵,其中D=diag(d1,d2,…,dn)表示拓扑图的度矩阵,表示节点i的度。L=[lij]n×n可定义为:
1.2 问题描述
考虑一个具有n个智能体的异质MAS,其中包含n-m个一阶多智能体、m个二阶多智能体。一阶结构的多智能体动力学方程定义为:
Tam等[41]研究了光栅轨迹和Peano轨迹对材料去除的影响。实验结果表明在光栅轨迹加工过程中存在明显的边缘效应,而Peano轨迹则有效避免了边缘效应的产生(图4(a)、图4(b))。同时文献中指出,为了更均匀地移除材料,轨迹方向的变化应当均匀地分布在整个表面上。

式中,xi(t)∈Rn,ui(t)∈Rn,体现第i个智能体在t时刻所处的位置状态和其自身的控制输入。二阶结构的智能体的动力学方程定义为:

式中,用xi(t)∈Rn,vi(t)∈Rn,ui(t)∈Rn,体现第i个智能体在t时刻所处的位置状态、速度状态及其自身的控制输入。
假设将异质MAS网络中的个体分成k(k≥2)群,如果智能体属于第k个群,则记σi=t。xσi是智能体系统的分群系数,且当σi=σj时,表示个体属于同一子群,并且有xσi=xσj,否则xσi≠xσj。
定义1当智能体系统具有任意的初始状态xi(0),vi(0)如果满足:
其中,∀i,j∈{1,2,…,n},∀σi,σj∈{1,2,…,k}。满足上述条件则说明异质MAS实现了k群一致性(k≥2)。
注1本文的论证都是基于一维向量空间,所得结论都可以利用克罗内克积(Kronecker product)拓展到n维向量空间。
(1)当‖x‖ →∞时,V(x)→∞。
引理2[15]无向图G的拉普拉斯矩阵L是半正定的,L矩阵所对应的特征值有一个0 根,其余特征值都是整数当且仅当图G是连通的。
2 自适应耦合权重下的群体一致性算法
根据MAS 网络内部邻居个体的信息交流情况,定义控制器如下:

其中,智能体i和智能体j属于同一子群时,hij=1,否则hij=0;cij(t)表示邻居智能体间的自适应耦合权重,并有cij(t)=cji(t),cij(0)=c >0;εij表示自适应控制律cij(t)的耦合强度且εij >0。
定理1如果MAS 的通信网络是固定无向连通的,那么由线性一阶二阶智能体组成的异质MAS在控制器(4)的作用下可以实现k群一致性。
证明根据控制器(4),可以将式(1)、(2)改写成:

因为设定MAS 的通信网络为无向连通的,那么邻接矩阵A=[aij]n×n是对称矩阵,因此:
根据上式形式可看出当ψ >0 时,可以调节参数ψ=1,得到:
然后利用引理 1,设S={(e1,e2,…,en,v1,v2,…,vm)|是S中的最大不变子集,当时:
根据上面得到的结果,最大不变子集M化为:
3 数值仿真
本文将进行Matlab 平台仿真实验来验证自适应耦合权重控制对MAS 的有效性。给定异质MAS 网络内部具有7个个体,节点个体间的通信关系如图1所示,且通信拓扑是无向连通的,其中1、2、3号个体具有一阶动力学特征,4、5、6、7号个体具有二阶动力学特征。7个个体的初始状态为xi(0)=[3,5,1,4,2,6]T,vi(0)=[4,0.2,1,2.5]T,自适应控制策略下的随机初始耦合权重为cij(0)=[5,1,4,2,3,6,7]T,分群系数xσ1=5,xσ2=2 。经典群体一致性的模型基于文献[16]提出,初始速度位置状态以及通信拓扑和以上相同。实验结果如图2~图6所示。

图1 通信拓扑图
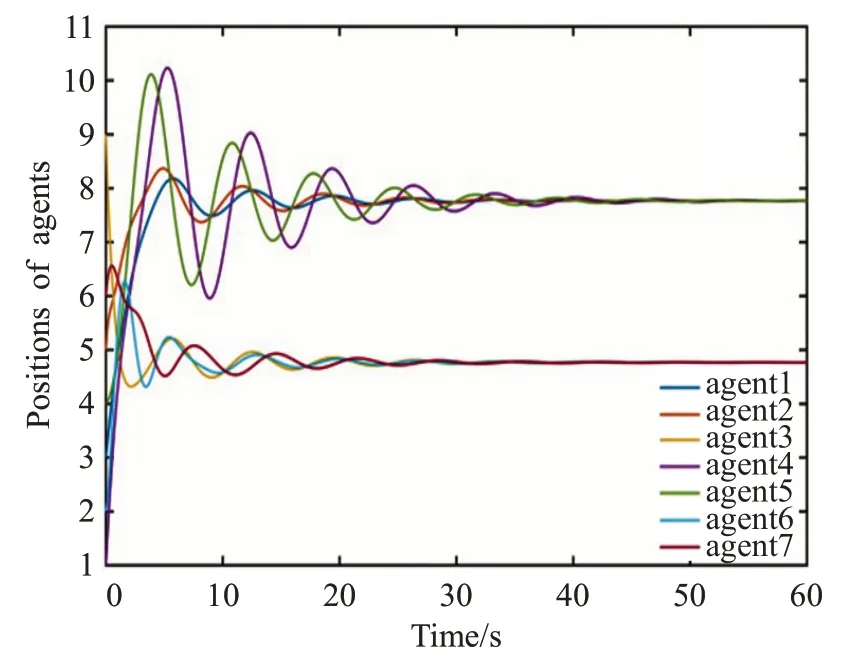
图2 经典异质多智能体群一致性位置变化曲线
对比图2和图4可以发现,在初始条件相同的情况下,经典群体一致性算法的各子群在第52秒位置状态达到一致,应用自适应耦合权重调节系统后,各子群位置状态达到一致的时间为第11秒,收敛速度提高了78.8%。
对比图3 和图5 可以发现,应用自适应耦合权重调节系统后,系统内部二阶个体速度达到一致的时间为第11秒,与位置状态的变化是吻合的。
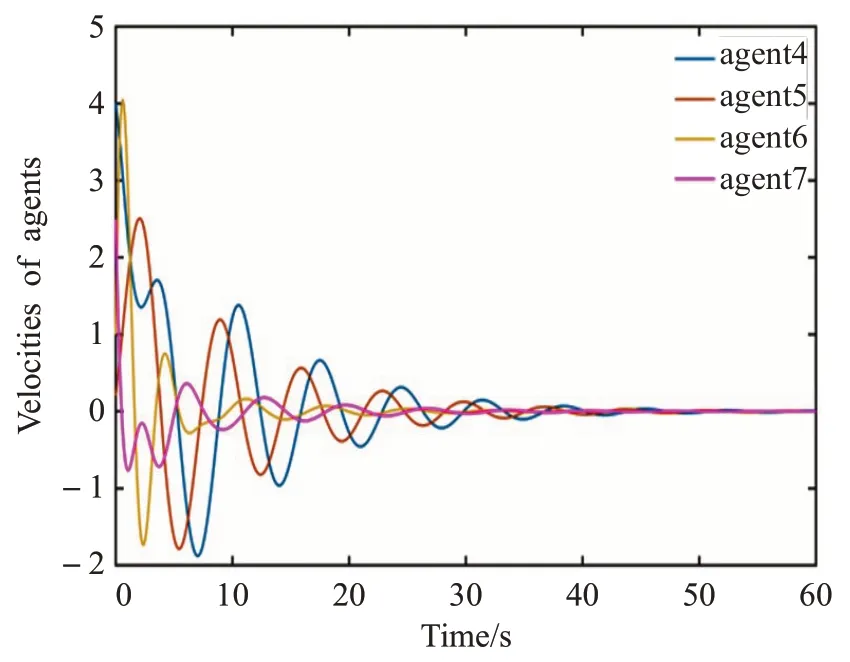
图3 经典异质多智能体群一致性速度变化曲线
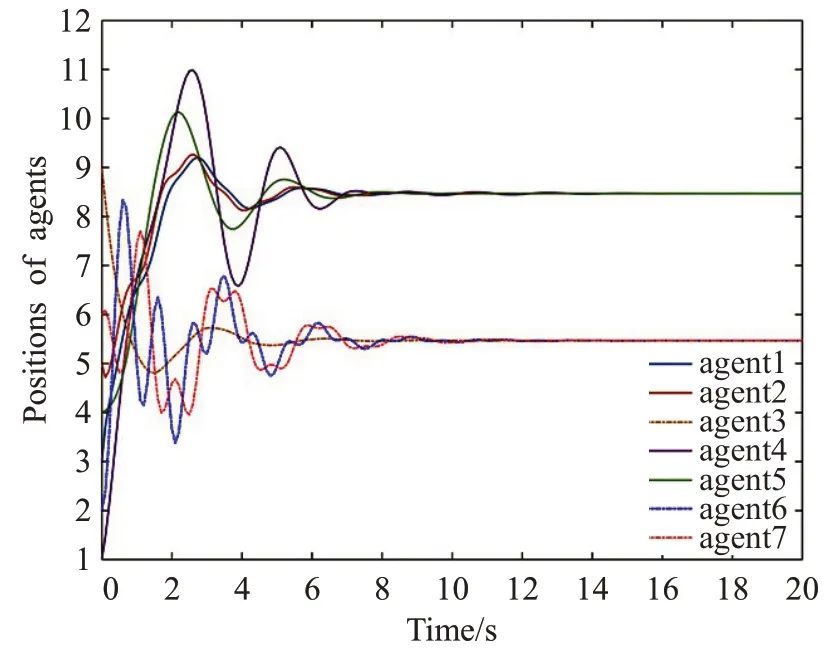
图4 自适应控制协议下的位置状态轨迹
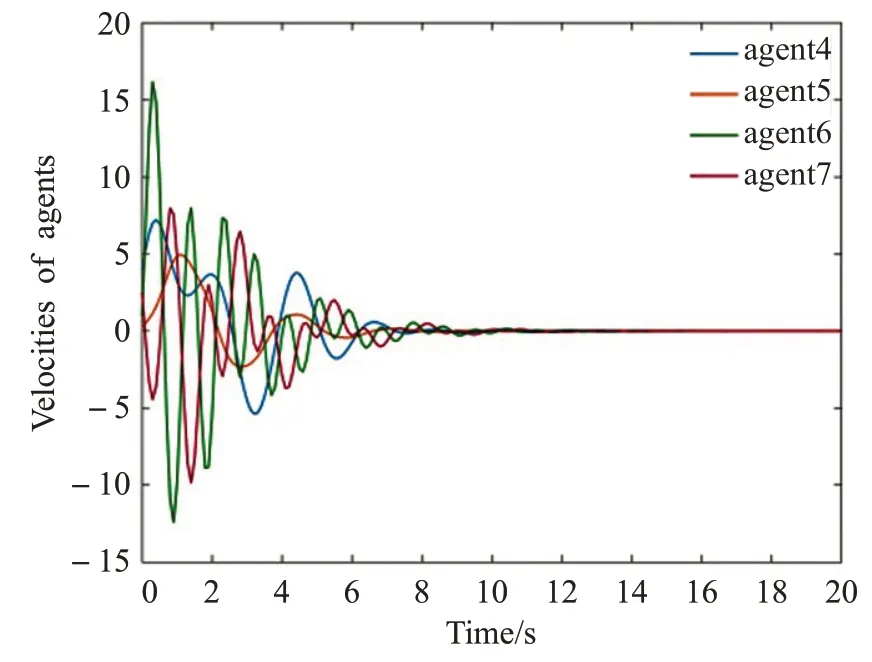
图5 自适应控制协议下的速度状态轨迹

图6 自适应耦合权重变化曲线
根据图6 的耦合权重变化曲线和图2~图5 中的状态变化可以发现,由于经典群体一致性控制算法的耦合权重是固定的,系统部分个体在前期运动时的调整步长较小,在中后期个体距离较近时的调整步长又偏大。依靠位置状态设计的自适应耦合权重算法针对这一缺陷进行了有效的改进,因而较好地提高了系统的整体收敛速度。
经典群体一致性采用固定耦合权重,而本文在加入自适应耦合权重之后经过证明发现,系统依旧可以在时间t趋近于无穷时同一子群收敛到同一位置,不同子群收敛于不同位置,这表明了改进算法依旧保持了良好的鲁棒性,数值仿真也很好地表现了这一点。
综上所述,仿真验证了系统能渐进收敛地达到群体一致性,且有效提高了系统的收敛速度。
4 结束语
本文针对包含一阶和二阶智能体的异质MAS,设计了基于固定无向通信拓扑的分布式的群体一致性控制协议,在基于边的自适应耦合权重控制协议和控制输入的作用下,多智能体系统能够渐进收敛达到群体一致性,数值仿真结果表明了理论分析的正确性和可行性。
